管道式工业建筑钢结构巡检装置及方法与流程
本发明涉及工业建筑钢结构状态运维检测,尤其涉及一种管道式工业建筑钢结构巡检装置及方法。
背景技术:
1、冶金企业钢结构厂房由于服役环境差,使用负荷重,地基条件复杂等特点,普遍存在腐蚀、变形、沉降、疲劳等痛点问题,其中柱子系统的沉降、倾斜和吊车梁系统的疲劳开裂问题较为突出,发展到一定程度会发生结构安全事故。目前,厂房柱子系统和吊车梁系统的结构状态管理一般模式是依靠人工检查和定期测量的方法,存在检查周期长、难度大、效率低等问题。随着在线监测技术的发展,在构件上部署传感器对沉降、倾斜、裂纹等指标进行在线监测的方法已得到应用和发展,大大提高了检测的效率,但也存在如下问题:(1)传感器、数据采集器价格昂贵导致部署投入大;(2)工业建筑结构劣化相对缓慢,无需高频采集数据,因此部署的传感器利用率普遍较低;(3)传感器、数据采集器本身也需要维护,随着部署数量增加后,其本身的运维又带来了新的问题。
技术实现思路
1、本发明所要解决的技术问题是提供一种管道式工业建筑钢结构巡检装置及方法,本巡检装置及方法克服传统工业建筑钢结构状态监测的缺陷,利用封闭式管道作为巡检运行载体,适用恶劣环境下的巡检监测,运用管道内空气压力作为巡检动力,实现钢结构构件全方位的巡检作业。
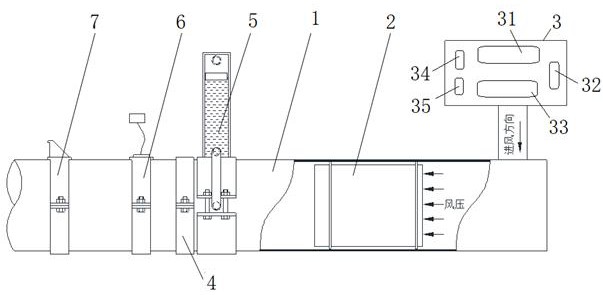
2、为解决上述技术问题,本发明管道式工业建筑钢结构巡检装置包括运行管道、巡检器、驱动器、定位套件、沉降测量套件、外置传感器套件和潜望式摄像套件;
3、所述运行管道沿长度方向设有中间腔体以及位于中间腔体两侧的狭小腔体,所述中间腔体为巡检器行走通道,所述狭小腔体分别为流体通道和空气通道,所述运行管道根据巡检现场需要线形架设或首尾相连形成环形架设;
4、所述巡检器包括位于所述中间腔体并沿运行管道行走的外壳,所述外壳沿长度方向设有通长风道,通长风道进气端设有通气阀和微型风力发电机,所述外壳内集成检测模块、电池模块和定位模块,所述外壳外表面设有与检测模块电连接的移动电气触点,所述检测模块通过通讯模块与云平台实时进行数据和运行状态交互,所述电池模块与微型风力发电机电连接;
5、所述驱动器包括空气压缩模块、空压传感器、空压调节阀、控制模块和通信模块,所述空气压缩模块设于所述运行管道前端,并向运行管道内注入空气在巡检器侧形成正压,所述控制模块通过空压传感器和空压调节阀调节所述运行管道内空气压力,并通过通信模块与云平台通讯连接;
6、所述定位套件包括上抱箍、下抱箍和电子标签,所述上抱箍和下抱箍通过螺栓连接固定于运行管道外壁,所述电子标签设于所述下抱箍,所述下抱箍底部设有贯通运行管道壁的凹槽,所述巡检器运行至凹槽上方时,所述定位模块与凹槽配合驻停巡检器,并且巡检器的检测模块读取电子标签,根据电子标签id执行预定义的检测指令;
7、所述沉降测量套件包括连通容器、浮子、柔性流体连通管和柔性空气连通管,所述连通容器通过管夹垂直设于运行管道外壁,并且管夹与待测量沉降的构件刚性连接,所述浮子设于连通容器内,所述柔性流体连通管两端分别连接连通容器底端和运行管道的流体通道,所述柔性空气连通管两端分别连接连通容器顶端和运行管道的空气通道,所述巡检器运行至所述沉降测量套件时,巡检器检测模块测量所述浮子在连通容器内的高度;
8、所述外置传感器套件包括固定电气触点和外置传感器,所述固定电气触点通过管夹安装于运行管道外壁,所述外置传感器通过线缆连接固定电气触点,所述巡检器运行至所述外置传感器套件时,巡检器外壳的移动电气触点接触到所述固定电气触点,由巡检器的检测模块控制所述外置传感器进行数据采集;
9、所述潜望式摄像套件包括潜望盒,所述潜望盒通过管夹安装于运行管道外壁并贯通巡检器的外壳,所述潜望盒内设有镜面反射层,外部光线经过镜面反射层的反射进入所述巡检器的检测模块,所述潜望盒侧面采用玻璃板隔断运行管道内部与外部的空气流通,调整所述潜望盒的安装朝向即可调整所述巡检器检测模块的拍摄角度;
10、所述定位套件分别与所述沉降测量套件、外置传感器套件和潜望式摄像套件配套安装使用。
11、进一步,所述巡检器外壳与中间腔体壁之间采用柔性密封圈阻隔两侧的流体通道和空气通道。
12、进一步,所述巡检器外壳内集成的检测模块包括激光测距模块、摄像模块、倾角传感器、rfid模块和空压传感器,各模块采用控制模块统一控制。
13、进一步,所述巡检器的定位模块包括采用电磁力控制向上或向下移动的定位销,所述巡检器运行至所述定位套件位置时,所述定位模块的定位销插入所述定位套件的凹槽。
14、进一步,所述运行管道的流体通道和所述沉降测量套件的连通容器内注入流动性好且不易挥发的硅油。
15、进一步,所述外置传感器套件中外置传感器是外置摄像头、温度传感器、位移传感器和/或测距传感器。
16、进一步,所述定位套件、沉降测量套件、外置传感器套件和潜望式摄像套件安装于所述运行管道后,与运行管道的巡检器行走通道以及流体通道和空气通道形成密封结构,即运行管道内空气和流体不会外泄。
17、一种基于上述巡检装置的管道式工业建筑钢结构巡检方法包括如下步骤:
18、步骤一、根据现场工业建筑钢结构的检测需求设计巡检路线,明确检测部位和检测内容,按巡检路线架设运行管道,在检测部位根据检测内容按需设置定位套件、沉降测量套件、外置传感器套件和/或潜望式摄像套件;
19、步骤二、在运行管道的前端安装驱动器,驱动器与运行管道之间采用管道连接,驱动器通过外接电源供电;
20、步骤三、安装巡检器,将巡检器开机进入运行模式后放入运行管道内,并将运行管道前端封闭;
21、步骤四、在云平台设置定位套件的电子标签id及对应的巡检执行动作,并下载到巡检器内,对驱动器、巡检器和云平台进行联动调试;
22、步骤五、驱动器通过空气压缩模块向运行管道内注入空气,在巡检器侧形成正压,当巡检器的通气阀关闭时,巡检器受正压作用沿运行管道前行,运行管道内压力由空压传感器和空压调节阀进行调节;
23、步骤六、巡检器行走至沉降测量套件、外置传感器套件和/或潜望式摄像套件位置时,通过定位模块与定位套件配合驻停巡检器,巡检器的检测模块读取定位套件的电子标签id,根据电子标签id的内容执行巡检动作,巡检动作采集的数据信息传输至云平台,单项巡检动作结束后定位模块与定位套件解锁,巡检器继续行走至下一巡检点执行巡检动作;
24、步骤七、巡检器完成所有巡检动作后,驱动器的空气压缩模块开启抽风功能,抽出运行管道内的空气,使巡检器受负压作用回退至初始位置,完成工业建筑钢结构的巡检作业。
25、进一步,所述步骤六中巡检动作包括通过沉降测量套件检测工业建筑钢结构的沉降,通过外置传感器套件拍摄现场影像、检测现场温度、检测位移距离以及相邻结构测距。
26、进一步,巡检器电池模块馈电时,巡检器的通气阀打开,运行管道内空气通过巡检器的通长风道向另一侧快速流动,推动微型风力发电机的叶片旋转发电,为巡检器内的电池模块充电。
27、由于本发明管道式工业建筑钢结构巡检装置及方法采用了上述技术方案,即本巡检装置包括运行管道、巡检器、驱动器、定位套件、沉降测量套件、外置传感器套件和潜望式摄像套件;巡检器通过驱动器作用沿运行管道行走,并通过定位套件驻停以及通过沉降测量套件、外置传感器套件和潜望式摄像套件执行相应的巡检检测。本方法根据现场工业建筑钢结构的检测需求设计巡检路线,明确检测部位和检测内容,按巡检路线架设运行管道,在检测部位根据检测内容按需设置定位套件、沉降测量套件、外置传感器套件和/或潜望式摄像套件;巡检器开机进入运行模式后放入运行管道内并在驱动器驱动下沿运行管道行走执行相应的巡检检测动作。本巡检装置及方法克服传统工业建筑钢结构状态监测的缺陷,利用封闭式管道作为巡检运行载体,适用恶劣环境下的巡检监测,运用管道内空气压力作为巡检动力,实现钢结构构件全方位的巡检作业。
- 还没有人留言评论。精彩留言会获得点赞!