一种基于全站仪的天文自动测量方法与流程
本发明属于天文测量,尤其涉及一种基于全站仪的天文自动测量方法。
背景技术:
1、天文测量是通过观测恒星位置以确定载体的天文坐标,或者确定两点间天文方位角的测量工作。它是一种隐蔽、可靠的定位定向手段,具有不受电磁干扰,自主工作,被动探测的优点,并且在所有测量中其定向精度最高。因此在大地网起始点、边的数据以及垂线偏差测定,天文测量都有着不可替代的作用。
2、科学技术的发展带来测量设备的革新,带动了天文测量的发展。传统的天文测量使用光学仪器t3、t4等作为测量仪器,采用无线收时器收录时号,使用石英钟作为授时工具,全程利用人工测量。电子技术、激光技术、数据记录处理技术以及卫星定位技术的发展,使得天文测量朝着小型化、自动化迈出了重要一步。目前,规范中推荐使用高精度的经纬仪或全站仪,可较大程度减少人力观测,提供高精度的测角信息,卫星导航定位系统也可为天文测量提供高精确的自动授时服务。
3、实现天文测量仪器的自动化观测,进一步提高天文测量作业效率,特别是消除传统天文测量人仪差影响的全自动测量,是现代天文测量发展的方向,然而大多传统的全站仪并没带有ccd或者cmos系统拍照或者视频测量的功能。
技术实现思路
1、针对现有技术中的上述不足,本发明提供的一种基于全站仪的天文自动测量方法解决了传统全站仪无法实现天文自动测量的问题,提高了测量的自动化程度,提升了测量结果的准确性和稳定性。
2、为了达到上述发明目的,本发明采用的技术方案为:一种基于全站仪的天文自动测量方法,包括以下步骤:
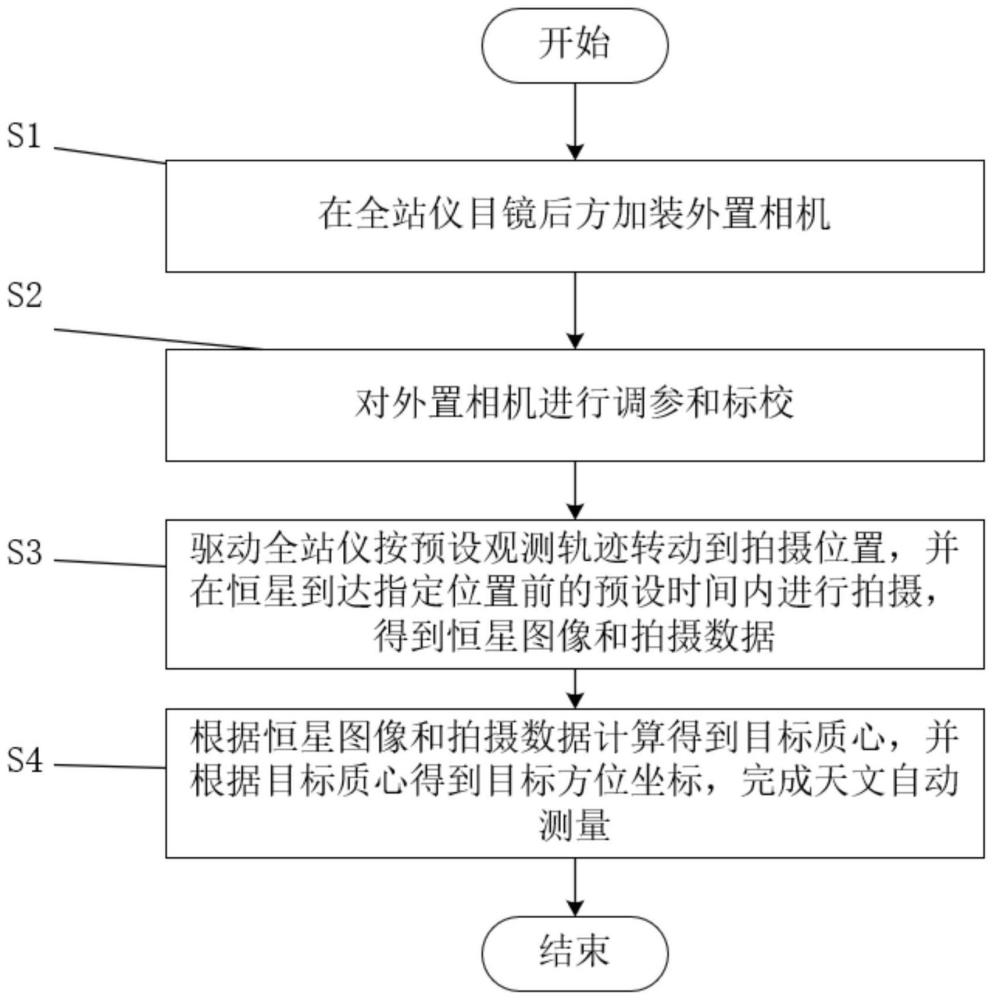
3、s1、在全站仪目镜后方加装外置相机;
4、s2、对外置相机进行调参和标校;
5、s3、驱动全站仪按预设观测轨迹转动到拍摄位置,并在恒星到达指定位置前的预设时间内进行拍摄,得到恒星图像和拍摄数据;
6、s4、根据恒星图像和拍摄数据计算得到目标质心,并根据目标质心得到目标方位坐标,完成天文自动测量。
7、本发明的有益效果为:在全站仪目镜后加装的外置相机,实现了天文影像的自动获取;在原始目标熵和原始背景熵的基础上进行平方并加入了分割阈值s的计算,既扩大了灰度对恒星图像的影响,又可以在存在背景噪声的情况下,可以减小由于背景噪声带来的系统误差;并根据提升灰度权重后的图像灰度熵,获取二值化图像,使得目标定位更准确;解决了传统全站仪无法实现天文自动测量的问题,提高了测量的自动化程度,提升了测量结果的准确性和稳定性。
8、进一步地,所述步骤s2具体为将外置相机的中心轴标校到与全站仪的视准轴保持固定的同轴关系;将外置相机的曝光时间控制在0.5秒以内,以及将外置相机的焦距设置为无穷远。
9、上述进一步方案的有益效果为:对曝光时间和相机焦距的设置,避免了目标恒星的图像出现拖影。
10、进一步地,所述步骤s3中拍摄数据包括恒星位置、拍摄时刻以及成像时刻。
11、上述进一步方案的有益效果为:获取的拍摄数据,为目标质心计算工作完成后的资料整理提供数据支持。
12、进一步地,所述步骤s4具体为:
13、s401、截取恒星图像中恒星目标附近预设像素的图像,并做灰度处理,得到初始图像;
14、s402、根据初始图像,得到目标灰度概率和背景灰度概率:
15、pa=p0+p1+p2+…+pt
16、pb=1-pa=pt+1+pt+2+pt+3+…+ps
17、其中,pa为目标灰度概率;pb为背景灰度概率;pt为目标中第t个灰度出现的概率;t为目标的灰度总数;pn为第s个灰度出现的概率;s为初始图像的灰度总数;
18、s403、根据目标灰度概率和背景灰度概率,得到目标概率分布和背景概率分布:
19、
20、
21、其中,a为目标概率分布;b为背景概率分布;
22、s404、根据目标概率分布和背景概率分布,得到目标灰度级熵和背景灰度级熵:
23、
24、
25、其中,ma为目标灰度级熵;mb为背景灰度级熵;pi为第i个目标灰度的出现概率;i为目标灰度编号;pr为第r个背景灰度的出现概率;r为背景灰度编号;
26、s405、根据目标灰度级熵和背景灰度级熵,计算得到目标熵和背景熵;
27、s406、根据目标熵和背景熵,选取分割阈值得到值最大的图像灰度熵:
28、h(s)=maa+mbb
29、0≤s≤255
30、其中,h(·)为图像灰度熵;s为分割阈值;
31、s407、根据图像灰度熵,将初始图像变为二值化图像:
32、s408、根据二值化图像和初始图像,得到目标质心,并整合目标质心和拍摄数据,得到目标方位坐标,完成天文自动测量。
33、上述进一步方案的有益效果为:根据恒星图像的灰度完成目标质心的计算,在目标熵和背景熵的基础上加入了分割阈值s的计算,既扩大了灰度对恒星图像的影响,又可以在存在背景噪声的情况下,可以减小由于背景噪声带来的系统误差。
34、进一步地,所述步骤s405中目标熵和背景熵的表达式分别为:
35、
36、
37、其中,maa为目标熵;mbb为背景熵;ma为目标灰度级熵;mb为背景灰度级熵;pi为第i个目标灰度的出现概率;i为目标灰度编号;pr为第r个背景灰度的出现概率;r为背景灰度编号;pa为目标灰度概率;pb为背景灰度概率;t为目标的灰度总数;s为初始图像的灰度总数。
38、上述进一步方案的有益效果为:通过提升灰度权重,扩大灰度对恒星图像的影响,使得目标提取更准确。
39、进一步地,所述步骤s407中二值化图像的表达式为:
40、
41、其中,g(·)为二值化图像;x为初始图像像素点横坐标;y为初始图像像素点纵坐标;h(·)为图像灰度熵;s为分割阈值。
42、上述进一步方案的有益效果为:将初始图像根据图像灰度熵变换为二值化图像,突出了图像中的目标;降低了目标识别难度,为后续提取目标质心做准备。
43、进一步地,所述步骤s408中目标质心的表达式为:
44、u=(x0,y0)
45、
46、
47、其中,u为目标质心;x0为目标质心的横坐标;y0为目标质心的纵坐标;i(·)为目标像素点;xu为目标像素点的横坐标;yv为目标像素点的纵坐标;u为目标像素点的横向编号;v为目标像素点的纵向编号;m为目标灰度右下角像素点的横向编号;n为目标灰度右下角像素点的纵向编号;i1为目标灰度左上角像素点的横向编号;j1为目标灰度左上角像素点的纵向编号;s为分割阈值。
48、上述进一步方案的额有益效果为:根据二值化图像中的目标像素,获取目标质心,对目标像素点进行逐一读取,保证了目标质心的准确度。
技术特征:
1.一种基于全站仪的天文自动测量方法,其特征在于,包括以下步骤:
2.根据权利要求1所述基于全站仪的天文自动测量方法,其特征在于,所述步骤s2具体为将外置相机的中心轴标校到与全站仪的视准轴保持固定的同轴关系;将外置相机的曝光时间控制在0.5秒以内,以及将外置相机的焦距设置为无穷远。
3.根据权利要求1所述基于全站仪的天文自动测量方法,其特征在于,所述步骤s3中拍摄数据包括恒星位置、拍摄时刻以及成像时刻。
4.根据权利要求3所述基于全站仪的天文自动测量方法,其特征在于,所述步骤s4具体为:
5.根据权利要求4所述基于全站仪的天文自动测量方法,其特征在于,所述步骤s405中目标熵和背景熵的表达式分别为:
6.根据权利要求4所述基于全站仪的天文自动测量方法,其特征在于,所述步骤s407中二值化图像的表达式为:
7.根据权利要求4所述基于全站仪的天文自动测量方法,其特征在于,所述步骤s408中目标质心的表达式为:
技术总结
本发明公开了一种基于全站仪的天文自动测量方法,属于天文测量技术领域,该方法包括在全站仪目镜后方加装外置相机;对外置相机进行调参和标校;驱动全站仪按预设观测轨迹转动到拍摄位置,并在恒星到达指定位置前的预设时间内进行拍摄,得到恒星图像和拍摄数据;根据恒星图像和拍摄数据计算得到目标质心,并根据目标质心得到目标方位坐标,完成天文自动测量。本发明解决了传统全站仪无法实现天文自动测量的问题,提高了测量的自动化程度,提升了测量结果的准确性和稳定性。
技术研发人员:时春霖,汤进九,李振,张超,马旺,陈少杰,王鸿桥,贾博宇,祝淼
受保护的技术使用者:中国人民解放军61206部队
技术研发日:
技术公布日:2024/3/5
- 还没有人留言评论。精彩留言会获得点赞!