提高星载成像光谱仪信噪比的运动补偿成像方法和系统与流程
本发明涉及卫星遥感成像,具体地,涉及一种提高星载成像光谱仪信噪比的运动补偿成像方法和系统。
背景技术:
1、成像光谱仪因其可以同时采集目标的空间信息和光谱信息,可对目标同时进行外形特征的分析和内部成分的识别,已经广泛应用在多种多型遥感成像卫星任务中。由于成像光谱仪将地表目标的信息分成多组光谱通道,从而使得光谱仪中探测器每个像元所接受到的通光量大幅减少,进而会影响光谱仪成像的信噪比。特别地,对于高空间分辨率成像需求的光谱仪,像元尺寸进一步减小,其信噪比更是无法满足成像任务需求。目前,星上成像光谱仪主要通过以下三种方法提高成像信噪比:
2、1)采用基于电子倍增的成像光谱仪,该方法会对单帧图像内每个像素分别判断是否进行电子倍增,对光谱信号倍增增益进行切换,针对弱信号提高其信噪比。在公告号为cn107635107b的发明专利(基于电子倍增的光谱图像合成系统,2019年)中详细说明了该方法的工作原理和系统组成;
3、2)采用基于阵列狭缝的成像光谱仪,该方法是利用阵列狭缝代替传统的单狭缝,通过狭缝阵列混合曝光提高光通量和信噪比。在公告号为cn111623876a的发明专利(一种基于s矩阵狭缝阵列的推扫式高光谱成像系统及方法,2020年)中详细说明了该方法的原理和阵列狭缝成像光谱仪系统组成;
4、3)采用基于补偿扫描镜的运动补偿方法,该方法通过在成像光谱仪主镜前端增设补偿扫描镜进行运动补偿来增加像元成像积分时间,提高信噪比。在《高分五号可见短波红外高光谱相机设计与研制》(遥感学报,2020年第24卷第4期)一文中说明了基于补偿扫描镜的运动补偿原理,并给出了补偿扫描镜的在轨使用方法以及在高分五号卫星上的运动补偿成像效果。在公告号为cn102607531b的发明专利(空间低速高精度二维像移补偿指向控制系统,2012年)中给出了补偿扫描镜及其控制驱动系统的实现方案和硬件组成。在《运动补偿下双通道星载高光谱成像仪图像配准》(红外与激光工程,2021年第50卷第3期)中对基于补偿扫描镜的运动补偿成像进行了几何建模,给出了运动补偿成像过程中扫描镜补偿角的设计方法。
5、虽然上述方法都可以提高成像光谱仪的信噪比,但是都大幅增加了仪器的设计和加工制造难度。其中,方法1为了实现对弱信号的判断和电子倍增,需要额外增加预放组、视频处理器组和成像控制器等器件和电路,增加了电路设计难度和仪器复杂性;方法2使用阵列狭缝,相比于原有单狭缝,增加了高精度电控位移台,并且增加了仪器设计、加工和装调难度;方法3虽然未增加成像光谱仪自身设计难度,但是补偿扫描镜及其控制系统的使用额外增加了整个光学载荷的设计难度和重量体积。根据补偿原理可知,通过补偿扫描镜对光轴进行调节,需要扫描镜尺寸与主镜尺寸接近。随着成像空间分辨率需求的逐步提高,主镜口径需求也越来越大,继续使用扫描镜必然会导致整星重量、设计难度和发射成本的大幅增加,其代价对于整星研制和发射将难以接受。综上,目前迫切需要设计一种无需改变现有成像光谱仪设计便可提高成像信噪比的方法。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种提高星载成像光谱仪信噪比的运动补偿成像方法和系统。
2、根据本发明提供的提高星载成像光谱仪信噪比的运动补偿成像方法,包括:
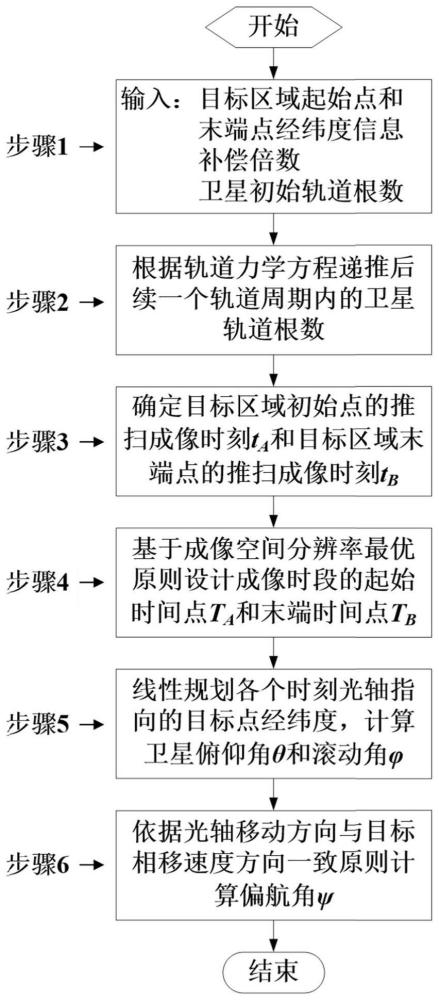
3、步骤1:定义地面目标区域起始点经纬度信息和末端点经纬度信息、成像补偿倍数,以及卫星初始轨道根数;
4、步骤2:根据卫星初始轨道根数递推后续一个轨道周期内的卫星轨道根数;
5、步骤3:根据地面目标区域起始点、末端点的经纬度信息和卫星轨道根数的递推结果,确定针对目标区域初始点的推扫成像时刻和针对目标区域末端点的推扫成像时刻;
6、步骤4:根据成像补偿倍数和成像空间分辨率最优化原则,设计补偿成像时段的起始和末端时间点;
7、步骤5:根据补偿成像时段内的卫星实时轨道根数和地面目标区域信息设计补偿成像时段内各个时刻卫星俯仰角和滚动角的导引规律;
8、步骤6:依据光轴移动方向与目标相移速度方向一致原则计算偏流角,偏流角的计算结果即为卫星偏航角的导引规律。
9、优选地,所述步骤1中,设定地面目标区域起始点经纬度信息和末端点经纬度信息、成像补偿倍数k,以及卫星初始轨道六根数,包括轨道半长轴a0、倾角i0、偏心率e0、升交点赤经ω0、近地点幅角ω0和真近点角f0;
10、所述步骤2中,根据卫星初始轨道六根数,除二体运动外,加入地球非球形摄动、日月引力摄动、大气阻力和光压,根据轨道力学方程递推后续一个轨道周期内的卫星轨道六根数,包括轨道半长轴a(t)、倾角i(t)、偏心率e(t)、升交点赤经ω(t)、近地点幅角ω(t)、真近点角f(t);
11、所述步骤3中,根据目标区域起始点、末端点的经纬度信息和卫星轨道根数的递推结果,确定针对目标区域初始点的推扫成像时刻ta和针对目标区域末端点的推扫成像时刻tb,其中,ta为卫星光轴指向目标区域初始点俯仰角需求为0°时对应的时刻,tb为卫星光轴指向目标区域末端点俯仰角需求为0°时对应的时刻,计算过程包括如下步骤:
12、步骤3.1:根据目标区域初始点的经纬度信息计算出初始点在地球固连坐标系中的位置矢量rfs;
13、步骤3.2:根据一个轨道周期内每个时刻的卫星轨道根数,计算每个时刻地球固连坐标系到卫星轨道坐标系的转换矩阵cfo(t),获得初始点在卫星轨道坐标系中的位置矢量ros(t),表达式为:
14、ros(t)=cfo(t)rfs
15、步骤3.3:根据ros(t)的单位向量在x轴的分量rosu(1)计算各个时刻卫星指向目标区域初始点的俯仰角θs(t),表达式为:
16、
17、步骤3.4:求解出的俯仰角θs(t)序列中存有两个时刻θs等于零,其中目标区域初始点与卫星之间的距离|ros(t)|更小的时刻即为针对目标区域初始点的推扫成像时刻ta;
18、步骤3.5:根据目标区域末端点的经纬度信息计算出末端点在地球固连坐标系中的位置矢量rfe;
19、步骤3.6:根据每个时刻地球固连坐标系到卫星轨道坐标系的转换矩阵cfo(t),获得末端点在卫星轨道坐标系中的位置矢量roe(t),表达式为:
20、roe(t)=cfo(t)rfe
21、步骤3.7:根据roe(t)的单位向量在x轴的分量roeu(1)计算各个时刻卫星指向目标区域末端点的俯仰角θe(t),表达式为:
22、
23、步骤3.8:求解出的俯仰角θe(t)序列中存有两个时刻θe等于零,其中目标区域末端点与卫星之间的距离|roe(t)|更小的时刻即为针对目标区域末端点的推扫成像时刻tb。
24、优选地,所述步骤4中,基于成像空间分辨率最优化原则,补偿成像时段的起始时间点ta和末端时间点tb分别为:
25、
26、
27、优选地,所述步骤5中,根据目标区域起始点和末端点经纬度信息线性规划出补偿成像时段内各个时刻卫星光轴应该指向的目标点经纬度,再结合补偿成像时段内每个时刻卫星的轨道根数,计算各个时刻卫星光轴指向对应地面目标点需求的俯仰角θ(t)和滚动角两个角度的计算过程包括如下步骤:
28、步骤5.1:针对某一时刻t,根据该时刻目标点的经纬度信息计算出该目标点在地球固连坐标系中的位置矢量rf(t);
29、步骤5.2:结合该时刻的地球固连坐标系到卫星轨道坐标系的转换矩阵cfo(t),获得该目标点在卫星轨道坐标系中的位置矢量ro(t),表达式为:
30、ro(t)=cfo(t)rf(t)
31、步骤5.3:根据ro(t)的单位向量在x轴的分量rou(1)和y轴分量rou(2)计算该时刻卫星指向目标点的俯仰角θ(t)和滚动角表达式为:
32、θ(t)=arcsin(rou(1)),
33、
34、优选地,所述步骤6中,计算卫星偏航角,包括以下步骤:
35、步骤6.1:根据补偿成像时段内每个时刻的目标点经纬度和卫星轨道信息,以及上一步骤中获得的俯仰角θ(t)和滚动角及其角速度信息,确定从地球固连坐标系到载荷像面坐标系的转换矩阵cfp(t),获得地面目标点在载荷像面坐标系中的投影位置矢量rp(t),表达式为:
36、rp(t)=cfp(t)rf(t)
37、步骤6.2:对rp(t)求导获得像移速度矢量vp(t),表达式为:
38、
39、步骤6.3:偏航角ψ(t)为:
40、
41、其中,vp1(t)、vp2(t)和vp3(t)分别为像面的前向、横向和纵向像移速度。
42、根据本发明提供的提高星载成像光谱仪信噪比的运动补偿成像系统,包括:
43、模块m1:定义地面目标区域起始点经纬度信息和末端点经纬度信息、成像补偿倍数,以及卫星初始轨道根数;
44、模块m2:根据卫星初始轨道根数递推后续一个轨道周期内的卫星轨道根数;
45、模块m3:根据地面目标区域起始点、末端点的经纬度信息和卫星轨道根数的递推结果,确定针对目标区域初始点的推扫成像时刻和针对目标区域末端点的推扫成像时刻;
46、模块m4:根据成像补偿倍数和成像空间分辨率最优化原则,设计补偿成像时段的起始和末端时间点;
47、模块m5:根据补偿成像时段内的卫星实时轨道根数和地面目标区域信息设计补偿成像时段内各个时刻卫星俯仰角和滚动角的导引规律;
48、模块m6:依据光轴移动方向与目标相移速度方向一致原则计算偏流角,偏流角的计算结果即为卫星偏航角的导引规律。
49、优选地,所述模块m1中,设定地面目标区域起始点经纬度信息和末端点经纬度信息、成像补偿倍数k,以及卫星初始轨道六根数,包括轨道半长轴a0、倾角i0、偏心率e0、升交点赤经ω0、近地点幅角ω0和真近点角f0;
50、所述模块m2中,根据卫星初始轨道六根数,除二体运动外,加入地球非球形摄动、日月引力摄动、大气阻力和光压,根据轨道力学方程递推后续一个轨道周期内的卫星轨道六根数,包括轨道半长轴a(t)、倾角i(t)、偏心率e(t)、升交点赤经ω(t)、近地点幅角ω(t)、真近点角f(t);
51、所述模块m3中,根据目标区域起始点、末端点的经纬度信息和卫星轨道根数的递推结果,确定针对目标区域初始点的推扫成像时刻ta和针对目标区域末端点的推扫成像时刻tb,其中,ta为卫星光轴指向目标区域初始点俯仰角需求为0°时对应的时刻,tb为卫星光轴指向目标区域末端点俯仰角需求为0°时对应的时刻,计算过程包括如下模块:
52、模块m3.1:根据目标区域初始点的经纬度信息计算出初始点在地球固连坐标系中的位置矢量rfs;
53、模块m3.2:根据一个轨道周期内每个时刻的卫星轨道根数,计算每个时刻地球固连坐标系到卫星轨道坐标系的转换矩阵cfo(t),获得初始点在卫星轨道坐标系中的位置矢量ros(t),表达式为:
54、ros(t)=cfo(t)rfs
55、模块m3.3:根据ros(t)的单位向量在x轴的分量rosu(1)计算各个时刻卫星指向目标区域初始点的俯仰角θs(t),表达式为:
56、θs(t)=arcsin(rosu(1)),
57、模块m3.4:求解出的俯仰角θs(t)序列中存有两个时刻θs等于零,其中目标区域初始点与卫星之间的距离|ros(t)|更小的时刻即为针对目标区域初始点的推扫成像时刻ta;
58、模块m3.5:根据目标区域末端点的经纬度信息计算出末端点在地球固连坐标系中的位置矢量rfe;
59、模块m3.6:根据每个时刻地球固连坐标系到卫星轨道坐标系的转换矩阵cfo(t),获得末端点在卫星轨道坐标系中的位置矢量roe(t),表达式为:
60、roe(t)=cfo(t)rfe
61、模块m3.7:根据roe(t)的单位向量在x轴的分量roeu(1)计算各个时刻卫星指向目标区域末端点的俯仰角θe(t),表达式为:
62、θe(t)=arcsin(roeu(1)),
63、模块m3.8:求解出的俯仰角θe(t)序列中存有两个时刻θe等于零,其中目标区域末端点与卫星之间的距离|roe(t)|更小的时刻即为针对目标区域末端点的推扫成像时刻tb。
64、优选地,所述模块m4中,基于成像空间分辨率最优化原则,补偿成像时段的起始时间点ta和末端时间点tb分别为:
65、
66、
67、优选地,所述模块m5中,根据目标区域起始点和末端点经纬度信息线性规划出补偿成像时段内各个时刻卫星光轴应该指向的目标点经纬度,再结合补偿成像时段内每个时刻卫星的轨道根数,计算各个时刻卫星光轴指向对应地面目标点需求的俯仰角θ(t)和滚动角两个角度的计算过程包括如下模块:
68、模块m5.1:针对某一时刻t,根据该时刻目标点的经纬度信息计算出该目标点在地球固连坐标系中的位置矢量rf(t);
69、模块m5.2:结合该时刻的地球固连坐标系到卫星轨道坐标系的转换矩阵cfo(t),获得该目标点在卫星轨道坐标系中的位置矢量ro(t),表达式为:
70、ro(t)=cfo(t)rf(t)
71、模块m5.3:根据ro(t)的单位向量在x轴的分量rou(1)和y轴分量rou(2)计算该时刻卫星指向目标点的俯仰角θ(t)和滚动角表达式为:
72、θ(t)=arcsin(rou(1)),
73、
74、优选地,所述模块m6中,计算卫星偏航角,包括以下模块:
75、模块m6.1:根据补偿成像时段内每个时刻的目标点经纬度和卫星轨道信息,以及上一模块中获得的俯仰角θ(t)和滚动角及其角速度信息,确定从地球固连坐标系到载荷像面坐标系的转换矩阵cfp(t),获得地面目标点在载荷像面坐标系中的投影位置矢量rp(t),表达式为:
76、rp(t)=cfp(t)rf(t)
77、模块m6.2:对rp(t)求导获得像移速度矢量vp(t),表达式为:
78、
79、模块m6.3:偏航角ψ(t)为:
80、
81、其中,vp1(t)、vp2(t)和vp3(t)分别为像面的前向、横向和纵向像移速度。
82、与现有技术相比,本发明具有如下的有益效果:
83、(1)本发明提供的方法可以实现卫星针对地表任意位置、任意方向区域的精确运动补偿成像,目标区域经纬度信息和补偿倍数可人为自由设定,方法适用性较好,可用于各种运动补偿成像任务;
84、(2)本发明提供的方法中卫星三轴姿态采用非线性导引策略,可以实现线性推扫观测,可保证在成像过程对地面条带各点的均匀运动补偿成像;
85、(3)与过往的提高信噪比的方法相比,本发明无需改进成像光谱仪,直接将现有传统的成像光谱仪固连安装在卫星上即可,降低了成像光谱仪的设计和加工难度;与基于补偿扫描镜的运动补偿方法相比,本发明是通过整星机动调整光轴对地推扫速度,提高像元积分时间,无需在卫星上增设补偿扫描镜,可以避免使用扫描镜带来的星体增重、星体设计难度和发射成本增加等问题。
- 还没有人留言评论。精彩留言会获得点赞!