一种多模多功能毫米波雷达系统的制作方法
本发明涉及测量测试,具体涉及一种多模多功能毫米波雷达系统。
背景技术:
1、近年来,毫米波雷达成像技术发展比较迅速,但由于毫米波合成孔径雷达成像技术天然的缺陷,图像中会出现一定程度的阴影效果。北京理工大学的黄晋祥等人提出的分布式无人机sar层析三维成像方法,虽然能够实现多基线测高,但需要多机型配合作业。另外在现代场景侦察系统中,大部分雷达采用单一的飞行工作模式或者地面侦察工作模式。
2、因此需要一种具有多种工作模式且可提高分辨率的雷达系统。
技术实现思路
1、本发明是为了解决近距离成像幅宽低、工作模式单一的问题,提供一种多模多功能毫米波雷达系统,使用分子阵同时采样的工作方式,解决了近距离成像幅宽低的问题,使用一维相控阵的形式也能够实现方位向凝视跟踪,快速扫描观测,提高探测灵敏度和抗杂波能力,并且具有下视三维成像的能力。
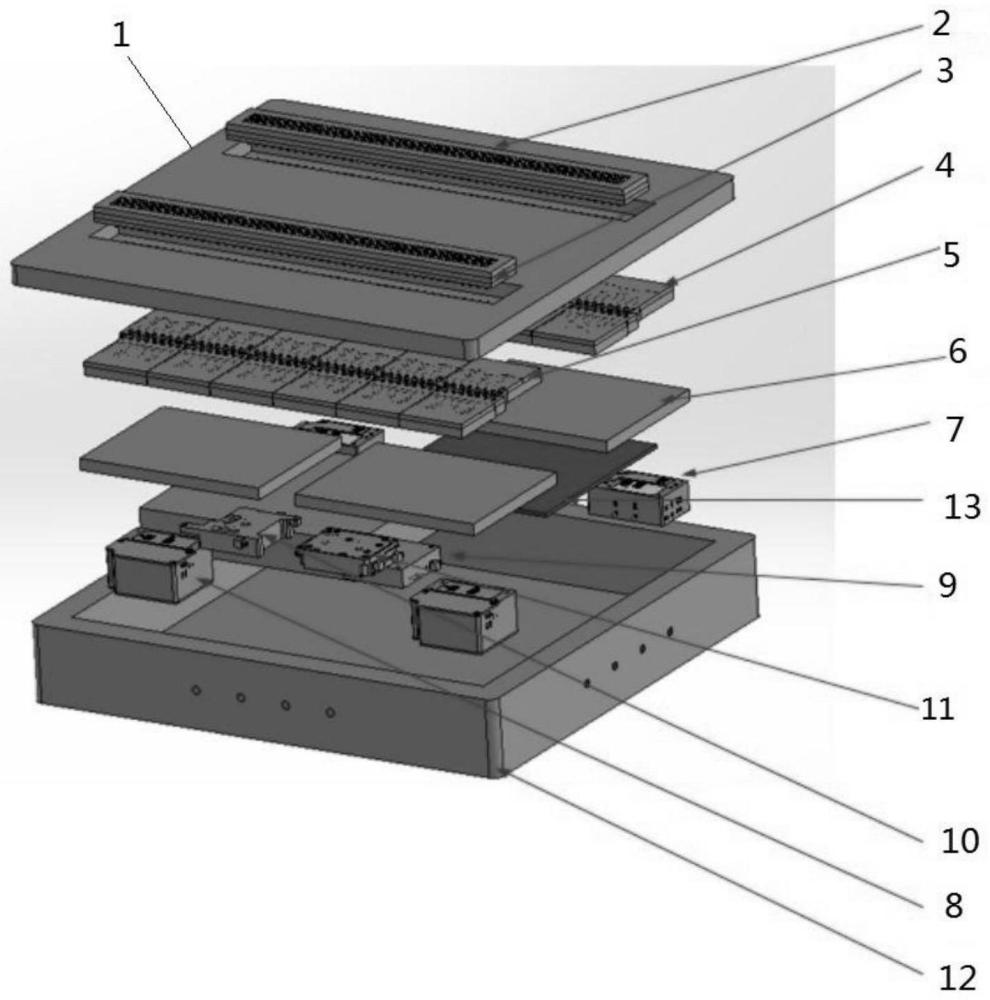
2、本发明提供一种多模多功能毫米波雷达系统,包括天线安装板、连接在天线安装板上的发射天线、接收天线,与发射天线连接的发射组件,与接收天线连接的接收组件,与发射组件、接收组件均连接的功分器,与功分器均连接的发射信道、接收信道,与发射信道连接的混频模块,与混频模块相连的晶振模块,与混频模块、接收信道均连接的信号处理模块,连接在发射组件、接收组件、功分器、发射信道、接收信道、混频模块、晶振模块、信号处理模块外侧的围堰和与发射组件、接收组件、功分器、发射信道、接收信道、信号处理模块均连接的波控组件,天线安装板与围堰组成密封结构;
3、发射天线和接收天线均为一维相控阵毫米波天线,发射天线和接收天线工作在w频段;多模多功能毫米波雷达系统包括下视三维成像模式、sar成像模式、前视侦查模式和干涉sar工作模式。
4、本发明所述的一种多模多功能毫米波雷达系统,作为优选方式,下视三维成像模式时,多模多功能毫米波雷达系统安装在载机平台的下方,发射天线和接收天线的方向与载机平台的飞行方向垂直并进行波束扫描得到扫描场景的三维成像,脉冲宽度为0us~450us;
5、还包括与围堰连接的天线座和与天线座依次可动连接的天线座平台和伺服系统,伺服系统与载机平台的下方连接;
6、sar成像模式包括条带成像模式,多模多功能毫米波雷达系统在伺服系统的带动下对载机飞行方向左右两侧进行正侧视成像,发射天线和接收天线部分打开并进行波束扫描得到合成孔径雷达成像。
7、本发明所述的一种多模多功能毫米波雷达系统,作为优选方式,sar成像模式时,相邻1/4~1/2的发射天线、接收天线打开以进行宽幅sar成像,打开的发射天线和接收天线进行幅度相位一致性校正,sar成像模式的视角为10°~85°、脉冲宽度为46.68us~9000us;
8、三维成像和合成孔径雷达成像相结合去除合成孔径雷达成像的阴影;
9、条带成像模式包括低分辨高幅宽模式和高分辨模式,低分辨高幅宽模式的分辨率小于高分辨模式的分辨率、幅宽大于高分辨模式的幅宽;
10、低分辨高幅宽模式可对大范围场景进行观测,高分辨模式可以对感兴趣场景进行精细成像。
11、本发明所述的一种多模多功能毫米波雷达系统,作为优选方式,干涉sar工作模式时,多模多功能毫米波雷达系统分为上半子阵和下半子阵、工作在一发两收的工作状态并扫描得到两幅图像,两幅图像经干涉处理后得到目标高程信息,将目标高程信息与三维成像复合应用。
12、本发明所述的一种多模多功能毫米波雷达系统,作为优选方式,前视侦查模式时,多模多功能毫米波雷达系统与三脚架和供电单元连接,三脚架和地面伺服连接,多模多功能毫米波雷达系统在地面伺服的带动下使用线性调频连续波体制、天线收发分置的形式在前视±80°的范围内沿方位向旋转对场景中目标进行侦察监视并获取目标的方位信息和位置信息,发射组件和接收组件同时工作,多模多功能毫米波雷达系统发射信号的时间长度大于多模多功能毫米波雷达系统所需要覆盖的距离范围、带宽≤750mhz。
13、本发明所述的一种多模多功能毫米波雷达系统,作为优选方式,发射天线和接收天线的天线单元间距d为:
14、
15、其中,λmin为扫描角度的最小波长,θs为波束宽度;
16、发射天线和接收天线的天线单元通道数n为:2000≥n≥70。
17、本发明所述的一种多模多功能毫米波雷达系统,作为优选方式,发射天线和接收天线的天线单元为开口波导喇叭,天线单元包括并列设置的第一开口波导、第二开口波导和与第一开口波导、第二开口波导的末端均连接的第三波导,第一开口波导和第二开口波导的前端中心开口。
18、本发明所述的一种多模多功能毫米波雷达系统,作为优选方式,发射天线和接收天线的天线单元数量各为96个,发射天线、接收天线通过波导馈电与发射组件、接收组件互连;
19、天线安装板为均温板,发射天线包括两个发射子阵、每个发射子阵均包括48个天线单元,接收天线包括两个接收子阵、每个接收子阵均包括48个天线单元,发射组件包括12个八通道发射组件,接收组件括12个八通道接收组件,功分器包括4个一分十二功分器,发射信道的数量为2个、均与混频模块相连,接收信道的数量为2个,混频模块包括本振源;
20、发射组件、接收组件通过多功能一体化mmic芯片、多层高频基板和低频电路板得到小型化腔体结构;
21、波控组件包括波控板和供电电源,波控板进行发射组件和接收组件的幅相控制、收发时序控制和与信号处理模块的接口通信并进行供电,供电单元使用分布式设计、大电流芯片采用独立供电方式;
22、波控板和供电电源通过电源调制分配器进行供电和控制信号传输;
23、多模多功能毫米波雷达系统使用风冷散热。
24、本发明所述的一种多模多功能毫米波雷达系统,作为优选方式,多模多功能毫米波雷达系统发射工作状态时,由后端的信号处理模块、发射信道、接收信道产生发射的频率激励信号通过功分器的功分馈电网络分给发射组件内部,再经发射组件的发射驱动放大器进行驱动放大后再经后级末级功放输出w频段信号;
25、发射天线的幅相控制在发射组件内完成、由矢量调制器进行通道的相位配置实现波束扫描,信号处理模块输出基带调频信号至混频模块得到调频信号,调频信号输入发射信道进行天线信号饱和输出再经功分器后输出至发射组件,发射组件进行幅相控制、由矢量调制器进行通道的相位配置实现波束扫描再通过发射天线辐射到空间;
26、接收工作状态时,目标回波信号经接收天线接收后由馈线依次馈入接收组件、功分器和接收信道并通过前级低噪声放大器进行链路的噪声系数优化后再经矢量调制器进行移相、衰减后输出w频段信号至信号处理模块;接收信道通过六位移相器和衰减器进行幅度、相位加权。
27、本发明所述的一种多模多功能毫米波雷达系统,作为优选方式,多模多功能毫米波雷达系统的工作方法为:多模多功能毫米波雷达系统上电后自动进入系统自检模式,检测各部件工作状态,自检通过后将自检状态上报回地面指挥控制系统并准备接收工作参数、指令,多模多功能毫米波雷达系统根据遥控指令和参数进行下视三维成像机载模式、sar成像机载模式、干涉sar成像模式和前视侦查模式的检测工作;
28、多模多功能毫米波雷达系统进行实时成像和目标检测并通过数传系统将压缩后实时图像及目标态势信息下传至地面控制系统;同时多模多功能毫米波雷达系统向机上记录仪发送用于任务结束后进行分析和回放处理的原始图像数据。
29、本发明具有以下优点:
30、(1)本发明提供的多模多功能毫米波雷达系统是一种微波有源探测雷达设备,在空中飞行状态下可实现对地面目标的合成孔径雷达成像、下视三维成像和干涉sar成像功能;在地面三脚架支撑下可实现地面近距离目标的测速和测距功能。
31、(2)本方案采用相控阵模式,在方位向靠相控阵天线窄波束实孔径实现方位向高分辨,在距离方向(高度方向)靠距离向大带宽实现高分辨,在飞行方向靠飞行方向合成孔径实现沿航迹方向的高分辨。
32、(3)本发明提出的毫米波多模多功能雷达系统同时具备飞行工作模式和地面侦察工作模式。
- 还没有人留言评论。精彩留言会获得点赞!