一种无人驾驶叉车的性能检测装置的制作方法
本发明涉及无人驾驶叉车测试领域,更具体地说是涉及一种无人驾驶叉车的性能检测装置。
背景技术:
1、无人驾驶叉车主要应用于港口装载以及物流等领域,其高度智能化且无人操作,作业效率高且稳定,无人驾驶叉车能够按照规定轨迹进行行驶,也可以根据实时路况进行运行轨迹以及车身姿态的调整。
2、为了满足安全行驶,对无人驾驶叉车具有一定的性能要求,比如无人驾驶叉车的刹车距离、紧急避障以及障碍物通过,无人驾驶叉车在出厂前需要对其进行上述一系列的性能测试,保证其能够正常运行。
3、现有的关于无人驾驶叉车性能的测试,其基本上都是在特定场地进行测试,测试装备简陋,测试不能贴近于真实工况,测试得出的无人驾驶叉车的性能指标失真。
4、因此,如何提供一种无人驾驶叉车的性能检测装置,使其能够克服上述问题,是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了一种无人驾驶叉车的性能检测装置。
2、为了实现上述目的,本发明采用如下技术方案:
3、一种无人驾驶叉车的性能检测装置,对无人驾驶叉车进行性能检测,包括:
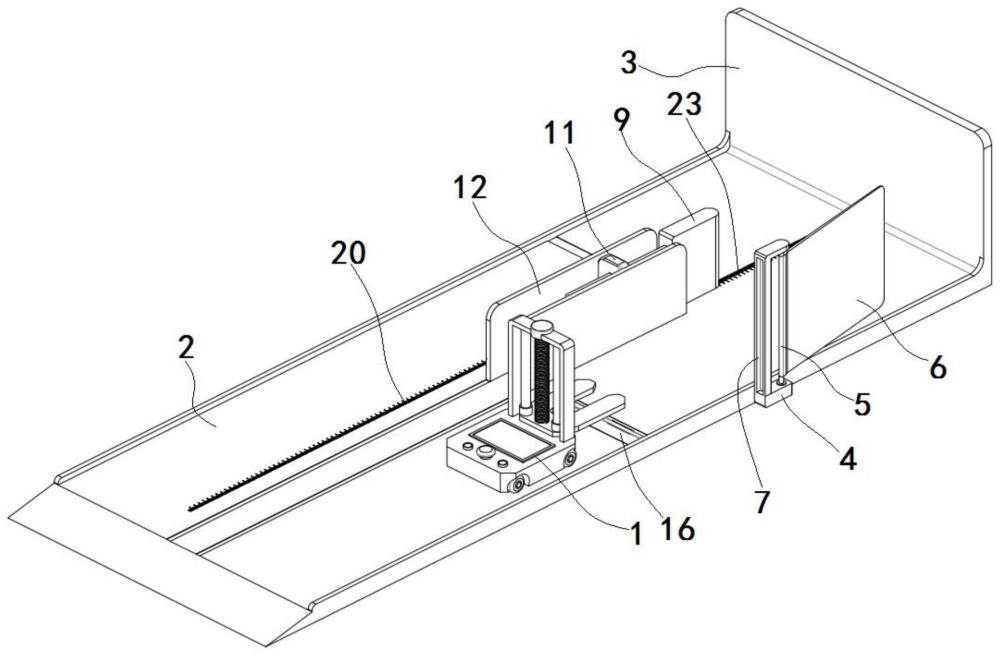
4、路基板,所述路基板水平布置且其一端竖向固定有墙板,所述墙板的板面与所述路基板的长度方向垂直;所述路基板的上板面设有互通的测试路段一和测试路段二,所述测试路段一的长度方向和所述测试路段二的长度方向均与所述路基板的板长方向相同;在所述路基板的上板面且沿其长度方向设有刻度线一,所述刻度线一与所述测试路段一位置对应;
5、单侧变窄以及障碍物模拟组件,所述单侧变窄以及障碍物模拟组件包括减速电机、支撑轴以及障碍板,所述减速电机固定在所述路基板一侧,所述测试路段二位于所述测试路段一和所述减速电机之间,所述支撑轴竖向布置且其下端与所述减速电机的输出转轴同轴固定,所述障碍板的板面竖向布置,所述障碍板的一端与所述支撑轴的外侧壁固定,所述障碍板的另一端能够布置在所述测试路段二内侧;
6、转弯测试组件,所述转弯测试组件布置在所述测试路段一和所述测试路段二之间,所述转弯测试组件包括伸缩缸一和挡板,所述伸缩缸一水平固定在所述路基板的上板面,所述挡板的板面竖向布置且与所述墙板的板面垂直,所述挡板的一端与所述伸缩缸一的伸缩端固定,所述挡板布置在所述墙板和所述伸缩缸一之间,所述无人驾驶叉车能够从所述墙板和所述挡板之间驶过。
7、经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种无人驾驶叉车的性能检测装置,本发明通过设计路基板,并且在路基板上划分有测试路段一和测试路段二,测试路段一上对应布置有刻度线一,无人驾驶叉车能够在测试路段一上进行刹车距离测试,通过刻度线一能够精准地测得无人驾驶叉车从开始急刹至车停的刹车距离;通过设计单侧变窄以及障碍物模拟组件,无人驾驶叉车在测试路段二上行进,减速电机能够带动障碍板快速大幅度摆动或小幅度摆动,行进中的无人驾驶叉车能够检测到前方的障碍板并进行急刹,或检测到前方路径变窄并进行车身换向,模拟组件既能够对无人驾驶叉车进行紧急避障测试,又能够检测无人驾驶叉车的换向能力;通过设计转弯测试组件,当无人驾驶叉车从测试路段二拐到测试路段一上时,通过调整挡板与墙板之间的距离,可以对挡板与墙板之间的转弯性能进行测试。
8、优选的,还包括减速带模拟组件,所述减速带模拟组件沿所述路基板的宽度方向依次设有两个,两个所述减速带模拟组件均与所述测试路段二位置对应;所述路基板下侧设有设备腔,所述路基板的上板面开设有与所述设备腔连通的限位孔,所述限位孔与所述测试路段二位置对应;所述减速带模拟组件包括伸缩缸二、抵接块、顶板以及连接板,所述伸缩缸二水平安装在所述设备腔内,所述抵接块与所述伸缩缸一二的伸缩端固定,所述抵接块的移动方向与所述路基板的长度方向相同,所述抵接块上设有一斜面,所述斜面相对于水平面倾斜布置,所述斜面的垂直线能够与所述路基板的板长方向上的中心线共面;所述限位孔中滑动穿设有所述顶板,所述顶板的下侧边与所述斜面滑动抵接,所述连接板的长度方向和所述顶板的长度方向均与所述路基板的宽度方向相同,所述顶板的上侧边分别与两个所述连接板的一长侧边铰接且铰接轴心线均与所述路基板的长度方向垂直,两个所述连接板的另一长侧边能够与所述路基板的上板面滑动抵接,所述顶板布置在两个所述连接板之间,所述无人驾驶叉车的车轮能够与所述顶板的上侧边和所述连接板的一侧板面滚动抵接。顶板的高度能够可靠调整,从而模拟不同高度的减速带,以此检测无人驾驶叉车的障碍物通过能力;连接板的设计,便于无人驾驶叉车越过顶板。
9、优选的,所述顶板的长度小于所述无人驾驶叉车的车宽,两个所述顶板的板面对齐,两个所述顶板的总长大于所述无人驾驶叉车的车宽。无人驾驶叉车能够可靠地途经顶板。
10、优选的,所述单侧变窄以及障碍物模拟组件还包括支撑架,所述支撑架与所述减速电机的机身固定,所述支撑轴上端与所述支撑架转动连接。支撑轴能够可靠转动。
11、优选的,所述转弯测试组件还包括光轴和限位块,所述光轴水平布置且其一端与所述挡板固定,所述光轴的轴心线与所述墙板的板面垂直,所述光轴位于所述伸缩缸一上方;所述限位块固定在所述路基板上,所述限位块上设有通孔一和通孔二,所述通孔一中滑动穿设有所述光轴,所述通孔二中穿设有所述伸缩缸一的伸缩轴。挡板能够顺利地往复移动。
12、优选的,所述转弯测试组件还包括防护板,所述防护板的板面竖直布置,所述防护板的长度方向与所述路基板的长度方向相同,所述防护板设有两个且端部对齐,所述挡板、所述伸缩缸一、所述光轴以及所述限位块均位于两个所述防护板之间。无人驾驶叉车不会碰到伸缩缸一、光轴以及限位块。
13、优选的,在所述路基板的上板面且沿其长度方向设有刻度线二,所述刻度线二位于所述测试路段一和所述测试路段二之间,所述挡板远离所述伸缩缸一的一端能够与所述刻度线二对齐。挡板与墙板之间的距离能够精准调整。
技术特征:
1.一种无人驾驶叉车的性能检测装置,对无人驾驶叉车(1)进行性能检测,其特征在于,包括:
2.根据权利要求1所述的一种无人驾驶叉车的性能检测装置,其特征在于,还包括减速带模拟组件,所述减速带模拟组件沿所述路基板(2)的宽度方向依次设有两个,两个所述减速带模拟组件均与所述测试路段二位置对应;所述路基板(2)下侧设有设备腔(21),所述路基板(2)的上板面开设有与所述设备腔(21)连通的限位孔(22),所述限位孔(22)与所述测试路段二位置对应;所述减速带模拟组件包括伸缩缸二(13)、抵接块(14)、顶板(15)以及连接板(16),所述伸缩缸二(13)水平安装在所述设备腔(21)内,所述抵接块(14)与所述伸缩缸一(8)二的伸缩端固定,所述抵接块(14)的移动方向与所述路基板(2)的长度方向相同,所述抵接块(14)上设有一斜面(140),所述斜面(140)相对于水平面倾斜布置,所述斜面(140)的垂直线能够与所述路基板(2)的板长方向上的中心线共面;所述限位孔(22)中滑动穿设有所述顶板(15),所述顶板(15)的下侧边与所述斜面(140)滑动抵接,所述连接板(16)的长度方向和所述顶板(15)的长度方向均与所述路基板(2)的宽度方向相同,所述顶板(15)的上侧边分别与两个所述连接板(16)的一长侧边铰接且铰接轴心线均与所述路基板(2)的长度方向垂直,两个所述连接板(16)的另一长侧边能够与所述路基板(2)的上板面滑动抵接,所述顶板(15)布置在两个所述连接板(16)之间,所述无人驾驶叉车(1)的车轮能够与所述顶板(15)的上侧边和所述连接板(16)的一侧板面滚动抵接。
3.根据权利要求2所述的一种无人驾驶叉车的性能检测装置,其特征在于,所述顶板(15)的长度小于所述无人驾驶叉车(1)的车宽,两个所述顶板(15)的板面对齐,两个所述顶板(15)的总长大于所述无人驾驶叉车(1)的车宽。
4.根据权利要求1所述的一种无人驾驶叉车的性能检测装置,其特征在于,所述单侧变窄以及障碍物模拟组件还包括支撑架(7),所述支撑架(7)与所述减速电机(4)的机身固定,所述支撑轴(5)上端与所述支撑架(7)转动连接。
5.根据权利要求1所述的一种无人驾驶叉车的性能检测装置,其特征在于,所述转弯测试组件还包括光轴(10)和限位块(11),所述光轴(10)水平布置且其一端与所述挡板(9)固定,所述光轴(10)的轴心线与所述墙板(3)的板面垂直,所述光轴(10)位于所述伸缩缸一(8)上方;所述限位块(11)固定在所述路基板(2)上,所述限位块(11)上设有通孔一和通孔二,所述通孔一中滑动穿设有所述光轴(10),所述通孔二中穿设有所述伸缩缸一(8)的伸缩轴。
6.根据权利要求5所述的一种无人驾驶叉车的性能检测装置,其特征在于,所述转弯测试组件还包括防护板(12),所述防护板(12)的板面竖直布置,所述防护板(12)的长度方向与所述路基板(2)的长度方向相同,所述防护板(12)设有两个且端部对齐,所述挡板(9)、所述伸缩缸一(8)、所述光轴(10)以及所述限位块(11)均位于两个所述防护板(12)之间。
7.根据权利要求1所述的一种无人驾驶叉车的性能检测装置,其特征在于,在所述路基板(2)的上板面且沿其长度方向设有刻度线二(23),所述刻度线二(23)位于所述测试路段一和所述测试路段二之间,所述挡板(9)远离所述伸缩缸一(8)的一端能够与所述刻度线二(23)对齐。
技术总结
本发明公开了一种无人驾驶叉车的性能检测装置,包括:路基板一端设有墙板,路基板上设有测试路段一和测试路段二;路基板上设有刻度线一;减速电机与路基板固定且其输出转轴与支撑轴固定,障碍板与支撑轴固定;伸缩缸一与路基板固定,挡板与伸缩缸一的伸缩端固定,挡板布置在墙板和伸缩缸一之间,无人驾驶叉车能够从墙板和挡板之间驶过。测试路段一上对应布置有刻度线一,无人驾驶叉车能够在测试路段一上进行刹车距离测试;减速电机能够带动障碍板快速大幅度摆动或小幅度摆动,模拟组件既能够对无人驾驶叉车进行紧急避障测试,又能够检测无人驾驶叉车的换向能力;通过调整挡板与墙板之间的距离,可以对挡板与墙板之间的转弯性能进行测试。
技术研发人员:张伟,董洲,曹伟,张健,赵奉奎,吴天余,杜成军
受保护的技术使用者:江苏省特种设备安全监督检验研究院
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!