基于电机转子角度估计的移动机器人定位方法及装置
本公开涉及人工智能领域,尤其涉及一种基于电机转子角度估计的移动机器人定位方法及装置。
背景技术:
1、随着技术的发展,移动机器人越来越广泛地应用于工业生产与生活中,可以更好地服务人类。为了在复杂、多样化的应用场景中保障给定任务的完成,机器人的环境感知性能是十分重要。环境感知性能稳定的移动机器人能够按导航路线移动到目标地点进行作业。
2、但移动机器人在实际应用过程中,由于移动机器人定位不准确,造成机器人的环境感知性能不稳定的技术问题。
技术实现思路
1、鉴于上述问题,本公开提供了一种基于电机转子角度估计的移动机器人定位方法及装置。
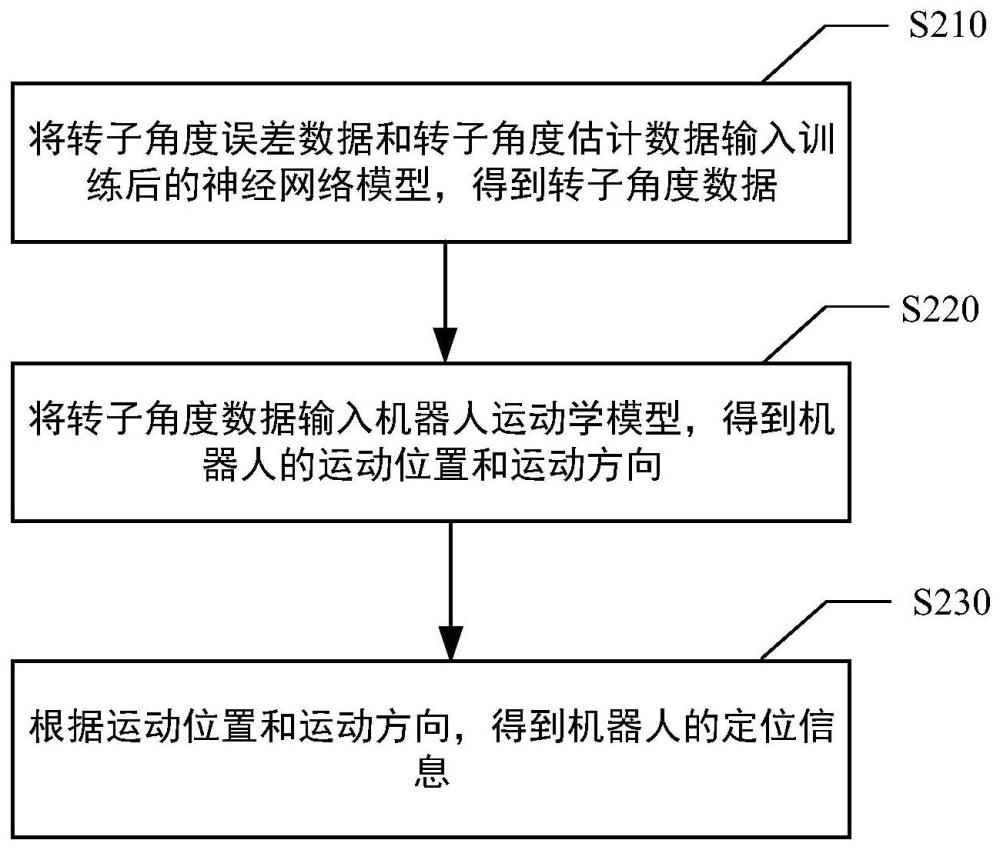
2、根据本公开的第一个方面,提供了一种基于电机转子角度估计的移动机器人定位方法,包括:将转子角度误差数据和转子角度估计数据输入训练后的神经网络模型,得到转子角度数据。其中,训练后的神经网络模型是根据转子角度误差样本数据和转子角度估计样本数据训练神经网络模型得到的。将转子角度数据输入机器人运动学模型,得到机器人的运动位置和运动方向,机器人运动学模型根据与转子角度数据对应的转子参数和机器人的运动学参数确定的。根据运动位置和运动方向,得到机器人的定位信息。
3、根据本公开的实施例,转子角度估计样本数据包括第一转子角度估计样本子数据和第二转子角度估计样本子数据,第一转子角度估计样本子数据是将电机在多个工况下的电机电流样本子数据输入转子角度估计模型得到的,电机电流样本子数据是通过电流传感器采集得到的,第二转子角度估计样本子数据是通过角度传感器采集电机在多个工况下的转子角度。
4、根据本公开的实施例,转子角度估计模型是根据电机的至少一个预设轴的预设轴样本子数据确定的,预设轴样本子数据包括预设轴电流样本子数据,预设轴电流样本子数据是对电机电流样本子数据通过坐标变换得到的。
5、根据本公开的实施例,转子角度估计数据包括第一转子角度估计子数据和第二转子角度估计子数据,第一转子角度估计子数据是将电机电流子数据输入转子角度估计模型得到的,第二转子角度估计子数据是角度传感器采集得到的。将转子角度误差数据和转子角度估计数据输入训练后的神经网络模型,得到转子角度数据包括:将转子角度误差数据、第二转子角度估计子数据和电机电流子数据的平方和输入训练后的神经网络模型,得到转子角度数据。
6、根据本公开的实施例,转子角度误差是根据转子角度估计数据和转子角度数据得到的。
7、根据本公开的实施例,机器人运动学模型是根据机器人的正运动学方程和逆运动学方程建立得到。
8、根据本公开的实施例,上述方法还包括:根据时间参数,对电机位置数据进行微分,得到机器人的运动速度和机器人的关节角速度。
9、根据本公开的实施例,转子角度误差样本数据是对待处理转子角度误差样本数据进行预处理得到的,方法还包括:确定待处理转子角度误差样本数据中第一待处理转子角度误差样本子数据和第二待处理转子角度误差样本子数据。根据第一待处理转子角度误差样本子数据和第二待处理转子角度误差样本子数据,对待处理转子角度误差样本数据进行归一化处理,得到转子角度误差样本数据。
10、根据本公开的实施例,上述方法还包括:根据预设公式,确定神经网络模型中隐含层的节点数,神经网络模型包括隐含层,隐含层中包括至少一个节点。
11、本公开的第二方面提供了一种基于电机转子角度估计的移动机器人定位装置,包括:第一输入模块,用于将转子角度误差数据和转子角度估计数据输入训练后的神经网络模型,得到转子角度数据。其中,训练后的神经网络模型是根据转子角度误差样本数据和转子角度估计样本数据训练神经网络模型得到的。第二输入模块,用于将转子角度数据输入机器人运动学模型,得到机器人的运动位置和运动方向,机器人运动学模型根据与转子角度数据对应的转子参数和机器人的运动学参数确定的。获得模块,用于根据运动位置和运动方向,得到机器人的定位信息。
12、本公开的第三方面提供了一种电子设备,包括:一个或多个处理器;存储器,用于存储一个或多个程序,其中,当所述一个或多个程序被所述一个或多个处理器执行时,使得一个或多个处理器执行上述方法。
13、本公开的第四方面还提供了一种计算机可读存储介质,其上存储有可执行指令,该指令被处理器执行时使处理器执行上述方法。
14、本公开的第五方面还提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述方法。
15、根据本公开提供的一种基于电机转子角度估计的移动机器人定位方法及装置,通过将转子角度误差数据和转子角度估计数据输入训练后的神经网络模型,得到精度高的转子角度数据,再将转子角度数据输入机器人运动学模型,得到准确度高的机器人的运动位置和运动方向。根据运动位置和运动方向,可精准得到机器人的定位信息,提高了机器人的环境感知性能的稳定性。
技术特征:
1.一种基于电机转子角度估计的移动机器人定位方法,包括:
2.根据权利要求1所述的方法,其中,所述转子角度估计样本数据包括第一转子角度估计样本子数据和第二转子角度估计样本子数据,所述第一转子角度估计样本子数据是将电机在多个工况下的电机电流样本子数据输入转子角度估计模型得到的,所述电机电流样本子数据是通过电流传感器采集得到的,所述第二转子角度估计样本子数据是通过角度传感器采集所述电机在多个所述工况下的转子角度。
3.根据权利要求2所述的方法,其中,所述转子角度估计模型是根据所述电机的至少一个预设轴的预设轴样本子数据确定的,预设轴样本子数据包括预设轴电流样本子数据,所述预设轴电流样本子数据是对所述电机电流样本子数据通过坐标变换得到的。
4.根据权利要求2所述的方法,其中,所述转子角度估计数据包括第一转子角度估计子数据和第二转子角度估计子数据,所述第一转子角度估计子数据是将电机电流子数据输入转子角度估计模型得到的,所述第二转子角度估计子数据是所述角度传感器采集得到的;
5.根据权利要求1所述的方法,其中,所述转子角度误差是根据所述转子角度估计数据和转子角度数据得到的。
6.根据权利要求1所述的方法,其中,所述机器人运动学模型是根据所述机器人的正运动学方程和逆运动学方程建立得到。
7.根据权利要求1所述的方法,还包括:
8.根据权利要求1所述的方法,所述转子角度误差样本数据是对待处理转子角度误差样本数据进行预处理得到的,所述方法还包括:
9.根据权利要求1所述的方法,其中,所述方法还包括:
10.一种基于电机转子角度估计的移动机器人定位装置,包括:
技术总结
本公开提供了一种基于电机转子角度估计的移动机器人定位方法及装置,可以应用于人工智能技术领域。该方法包括:将转子角度误差数据和转子角度估计数据输入训练后的神经网络模型,得到转子角度数据;其中,训练后的神经网络模型是根据转子角度误差样本数据和转子角度估计样本数据训练神经网络模型得到的;将转子角度数据输入机器人运动学模型,得到机器人的运动位置和运动方向,机器人运动学模型根据与转子角度数据对应的转子参数和机器人的运动学参数确定的;根据运动位置和运动方向,得到机器人的定位信息。
技术研发人员:洪彬,陈美美,胡明,杜强,张雁翔,侯静
受保护的技术使用者:天津大学
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!