一种傅里叶红外光谱仪的控制方法及系统与流程
本发明涉及光谱分析仪器控制,具体涉及一种傅里叶红外光谱仪的控制方法及系统。
背景技术:
1、傅里叶红外光谱仪通过动镜的运动产生光程差,同时调制激光和红外辐射。动镜运动的行程正比于光程差,光程差的大小是影响光谱分辨率的主要因素。
2、由于电路中各种元器件、走线或滤波器的延迟,当光谱仪的动镜运动速度不稳定时,即使通过激光作为尺度标准来进行采样,也会造成每个采样点的光程差存在差异,从而降低仪器信噪比。此外,如果使用对频率响应较为敏感的dlatgs(氘化l-丙氨酸硫酸三苷肽)探测器,信噪比在速度不稳定时还会进一步降低。
3、分辨率和信噪比是傅里叶光谱仪的重要指标。因此,通过控制动镜平稳运动,才能提高光谱信号的质量。此外,根据不同应用中探测目标对光谱分辨率的需求,仪器需要具备分辨率可调整的功能。上述问题亟待解决,为此,提出一种傅里叶红外光谱仪的控制方法。
技术实现思路
1、本发明所要解决的技术问题在于:如何控制动镜平稳运动,提高光谱信号的质量,提供了一种傅里叶红外光谱仪的控制方法。
2、本发明是通过以下技术方案解决上述技术问题的,本发明包括以下步骤:
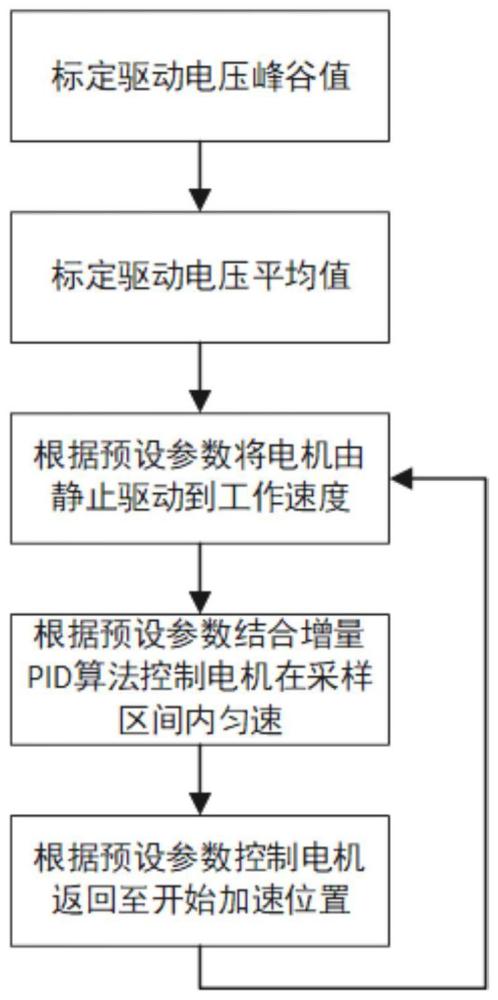
3、step1:标定音圈电机的驱动电压峰值umax、驱动电压谷值umin;
4、step2:标定音圈电机的驱动电压平均值uaver;
5、step3:在一个运动周期内,根据标定的驱动电压谷值umin与预设控制量δu1将电机由静止驱动,由“开始加速位置”加速运动到“工作速度位置”,其中,预设控制量δu1为输出的预设驱动电压值;
6、step4:当动镜到达“工作速度位置”时,采集激光频率,将激光频率的采集值与预设值进行比较,得出增量式pid算法中的误差项,然后根据增量式pid算法及预设参数得到控制量,驱动音圈电机带动动镜在采样区间内匀速运动,其中控制量为数字量信号,预设参数包括中的增量式pid算法中的p参数、i参数、d参数及输出限值δu_limit;
7、step5:当动镜匀速运动到“开始减速位置”,根据标定的驱动电压峰值控制电机开始减速直至“减速到零位置”;
8、step6:当动镜减速到“减速到零位置”,根据标定的驱动电压峰值umax与预设控制量δu2控制电机返回至“开始加速位置”,其中,预设控制量δu2为输出的预设驱动电压值;
9、step7:重复step3~step6,完成下一周期的运动。
10、更进一步地,在所述step1中,具体包括以下过程:
11、s11:采集音圈电机的驱动电压,将相邻的驱动电压峰值、驱动电压谷值之间的间隔作为一个周期,同时在周期内采集激光干涉信号上升沿,上升沿数目即对应的动镜总行程,也对应电机有效行程,且一个上升沿对应一个信号点;
12、s12:判断音圈电机在预设驱动电压峰谷值参数下,当前的有效行程是否满足光谱计算所需的数据量要求;若否,跳转至步骤s13;
13、s13:判断音圈电机有效行程是否小于标称分辨率所要求的最小数据量,若是,增大音圈电机的驱动电压峰谷值;若否,减小音圈电机的驱动电压峰谷值;进而标定当前驱动电压峰、谷值。
14、更进一步地,在所述步骤s11中,根据目标周期内激光干涉图的信号点的数量计算得到当前光程差,即电机有效行程s,具体计算公式如下:
15、s=n*λ;
16、其中,n为目标周期内激光干涉图的信号点的数量,λ为激光波长,激光干涉图即以1至n排序的信号点的集合。
17、更进一步地,在所述步骤s12中,电机有效行程s在预设摆动距离区间[s1,s2]内。
18、更进一步地,在所述步骤s13中,若s<s1,则调大驱动电压峰谷值,若s>s2,则调小驱动电压峰谷值,使得s1<s<s2。
19、更进一步地,在所述step2中,具体包括以下过程:
20、s21:选取周期内红外干涉信号最高点作为“零光程差位置”,判断“零光程差位置”是否在电机有效行程的中间位置范围;若否,跳转至步骤s22;
21、s22:判断“零光程差位置”是否早于电机有效行程的中间位置范围最小值,若是,减小音圈电机的驱动电压平均值;若否,增大音圈电机的驱动电压平均值;直到“零光程差位置”处于电机有效行程的中间位置范围,进而标定当前驱动电压平均值。
22、更进一步地,在所述步骤s21中,设定目标周期内激光干涉图中间区域为其中δ为允许偏差,n为目标周期内激光干涉图的信号点的数量。
23、8.根据权利要求7所述的一种傅里叶红外光谱仪的控制方法,其特征在于,在所述步骤s22中,若即零光程差点早于目标周期内激光干涉图的中间区域出现,此时减小驱动电压平均值;若即零光程差点晚于目标周期内激光干涉图的中间区域出现,此时增大驱动电压平均值;其中,n0为零光程差点的位置。
24、更进一步地,在一个工作周期内,将音圈电机运动分为正向运动和反向运动,驱动电压按设定规律从谷值增加到峰值的过程即对应正向运动,驱动电压按设定规律从峰值减小到谷值的过程即对应反向运动,红外信号仅在正向运动时采集;
25、其中,正向运动过程如下:
26、标定的驱动电压谷值对应音圈电机正向运动时“开始加速位置”,音圈电机由静止自“开始加速位置”加速,进行正向运动,在“采样起点位置”前的“工作速度位置”加速至工作速度;
27、音圈电机在“工作速度位置”和“开始减速位置”以工作速度保持匀速运动;
28、标定的驱动电压峰值对应“开始减速位置”,音圈电机经过“开始减速位置”减速到零,即到达“减速到零位置”;
29、反向运动过程如下:
30、音圈电机正向运动减速到零后,自然返回到“开始加速位置”,即对应正向运动时的“开始减速位置”;
31、音圈电机自“开始加速位置运动”至“开始减速位置”,反向运动的“开始减速位置”即对应正向运动的“开始加速位置”;
32、音圈电机反向运动减速到零后,到达“停止运动位置”,然后自然返回到正向运动的“开始加速位置”。
33、本发明还提供了一种傅里叶红外光谱仪的控制系统,采用上述的控制方法对傅里叶红外光谱仪的音圈电机运动进行控制,即对动镜的运动进行控制,包括:激光探测电路、整形电路、mcu、d/a转换电路、电压偏移电路、功率放大电路、音圈电机;激光探测电路、整形电路、mcu、d/a转换电路、电压偏移电路、功率放大电路、音圈电机与音圈电机的线圈依次连接,音圈电机的线圈和动镜连接在同一摆臂上,其中音圈电机的线圈即为音圈电机动子;
34、光谱仪每个周期包括以下运动过程:
35、a:在每个周期的“开始加速位置”,mcu输出数字量信号u(n)至d/a转换电路,d/a转换电路将数字量信号转换成模拟信号,模拟信号经电压偏移电路转换成正负电压,再经过功率放大电路后驱动音圈电机运动,音圈电机带动动镜加速运动到“工作速度位置”,其中,该数字量信号u(n)=umin+n*δu1;
36、b:激光探测电路及整形电路输出激光干涉方波到mcu,mcu通过内部计数器测量激光干涉方波的周期,并转化成频率,该频率用于表征电机运动速度,当动镜运动到“工作速度位置”时,mcu根据增量式pid算法输出匀速数字量信号u(n+1)至d/a转换电路,d/a转换电路将匀速数字量信号转换成匀速模拟信号,匀速模拟信号经电压偏移电路转换成匀速正负电压,再经过功率放大电路后驱动音圈电机运动,音圈电机带动动镜在采样区间内匀速运动,其中,该匀速数字量信号u(n+1)=u(n)+δu,δu为增量式pid算法输出的数字增量;
37、c:当动镜匀速运动到“开始减速位置”时,mcu输出数字量信号至d/a转换电路,d/a转换电路将数字量信号转换成模拟信号,模拟信号经电压偏移电路转换成正负电压,再经过功率放大电路后驱动音圈电机运动,音圈电机带动动镜减速运动到“减速到零位置”,其中,该数字量信号即驱动电压峰值umax;
38、d:当动镜匀速运动到“减速到零位置”时,mcu输出数字量信号u(n)至d/a转换电路,d/a转换电路将数字量信号转换成模拟信号,模拟信号经电压偏移电路转换成正负电压,再经过功率放大电路后驱动音圈电机运动,音圈电机带动动镜运动到“开始加速位置”,即可进入下一周期,其中,该数字量信号u(n)=umax-n*δu2。
39、本发明相比现有技术具有以下优点:该傅里叶红外光谱仪的控制方法,通过标定仪器的运动控制参数,确定光谱仪不同分辨率下的电机有效行程;提出的策略适用于不同光谱分辨率下的电机控制,即在不同的光谱分辨率设置下,均可以满足光谱计算所需的数据量,同时保证电机有效行程内动镜运动速度的均匀性,提高红外光谱信号的质量。
- 还没有人留言评论。精彩留言会获得点赞!