一种车辆定位的方法、装置、电子设备及存储介质与流程
本技术涉及自动驾驶汽车,尤其涉及一种车辆定位的方法、装置、电子设备及存储介质。
背景技术:
1、随着自动驾驶技术日趋成熟,自动驾驶汽车也被视为提高交通效率和改善交通安全的重要措施之一。不仅如此,无人驾驶还能解决传统汽车面临的疲劳驾驶、酒后驾驶和交通拥堵等情况,无人车将改变传统交通运输方式。其中,无人驾驶汽车定位问题一直是研究的重点和热点,能够较好地进行定位才能使无人驾驶汽车在不同场景下进行安全、高效的行驶。
2、通常情况下,无人驾驶汽车通过全球导航卫星系统(global navigationsatellite system,gnss)获取汽车的经纬度坐标,从而得到车辆的绝对位置,并通过融合惯性测量单元(inertial measurement unit,imu)或视觉惯性里程计(visual-inertialodometry,vio)平滑定位轨迹,使输出的轨迹稳定且精确。目前在无人驾驶汽车定位领域中,gnss和vio的融合策略很多,以滤波方法和因子图方法为主,由于因子图经过多次迭代,可以有效地减少线性化的误差,多次迭代优于卡尔曼滤波的一次迭代,也使基于因子图的融合方法应用更加广泛。但现有的因子图方法通常设置vio的权重为固定值,这种方法存在定位精度较差的问题,例如:在gnss误差较大或gnss拒止的情况时,由于vio权重固定,vio不足以对定位结果起决定性影响,gnss的错误信息将大幅降低定位精度;或在gnss位于空旷场景时,由于此时gnss定位精度高于vio,由于vio的权重固定,会引入vio的错误信息将降低整体融合定位精度。
3、因此,现有技术亟需改进。
技术实现思路
1、鉴于上述现有技术的不足之处,本技术提供了一种车辆定位的方法、装置、电子设备及存储介质,应用于自动驾驶汽车技术领域,通过获取vio的车辆位姿信息,以及gnss的车辆定位信息,并计算出二者的模长比值,根据模长比值计算vio的权重,再将vio的权重带入因子图中进行gnss和vio的融合定位计算,得到精准的车辆实时位置信息,以提高自动驾驶汽车的定位精度。
2、第一方面,本技术提供一种车辆定位的方法,该方法包括以下步骤:
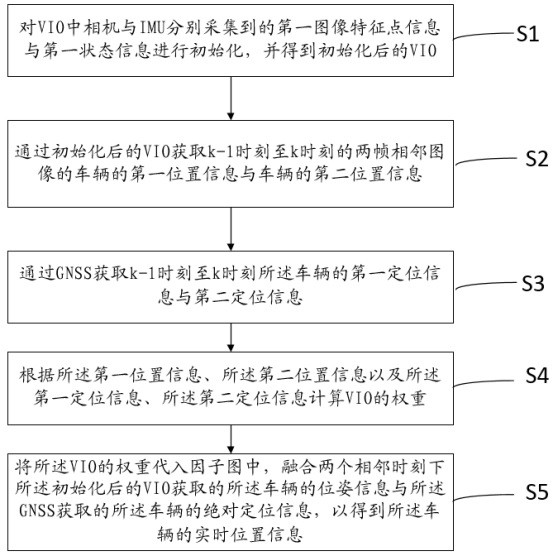
3、s1:对vio中相机与imu分别采集到的第一图像特征点信息与第一状态信息进行初始化,并得到初始化后的vio;
4、s2:通过初始化后的vio获取k-1时刻至k时刻的两帧相邻图像的车辆的第一位置信息与车辆的第二位置信息;
5、s3:通过gnss获取k-1时刻至k时刻所述车辆的第一定位信息与第二定位信息;
6、s4:根据所述第一位置信息、所述第二位置信息以及所述第一定位信息、所述第二定位信息计算vio的权重;
7、s5:将所述vio的权重代入因子图中,融合两个相邻时刻下所述初始化后的vio获取的所述车辆的位姿信息与所述gnss获取的所述车辆的绝对定位信息,以得到所述车辆的实时位置信息。
8、本技术提出的一种车辆定位的方法,通过对vio中的相机和imu分别采集到的第一图像特征点信息与第一状态信息进行初始化,解决了相机无法得到视觉惯性里程计的尺度的问题,得到初始化后的vio,可以恢复两帧相邻图像之间的相对旋转和位移,进而恢复视觉惯性里程计的尺度。而后使用初始化后的vio获取k-1时刻至k时刻的两帧相邻图像的车辆的第一位置信息与车辆的第二位置信息,并通过gnss获取k-1时刻至k时刻的车辆的第一定位信息与第二定位信息,k-1时刻和k时刻为相邻的两个时刻点,gnss获取到的第一定位信息与第二定位信息表示车辆在经纬度上的绝对位置,而初始化后的vio获取到的车辆的第一位置信息与第二位置信息则为车辆在世界坐标系下的位置,通过第一位置信息、第二位置信息以及第一定位信息、第二定位信息可以计算出两帧相邻图像之间的模长比值,从而根据模长比值计算出vio的权重,将vio的权重代入因子图中融合两帧相邻图像的车辆的位姿信息和定位信息,在gnss定位信息精度不足时,vio的权重占比较多,在gnss定位信息精度较高时,vio的权重占比较小,避免了vio获取到的位姿信息在融合时,因权重固定而无法精准定位的问题。因此,本技术中提出的一种车辆定位的方法,通过自动计算vio的权重,在采用因子图中进行gnss和vio的融合定位计算时,引入合适的vio的权重,可得到精准的车辆实时位置信息,具有提高自动驾驶汽车的定位精度的有益效果。
9、进一步地,所述步骤s1包括:
10、s11:根据所述第一图像特征点信息与所述第一状态信息构建基于滑动窗口的紧耦合融合算法,分别得到所述相机的第一测量残差与所述imu的第二测量残差;
11、s12:将所述第一测量残差、所述第二测量残差与马氏范数的和最小化,得到初始化后的所述vio。
12、本技术提出一种车辆定位的方法,通过对第一图像特征点信息以及第一状态信息构件基于滑动窗口的紧耦合融合算法,可以得到相机的第一测量残差与imu的第二测量残差,而后将第一测量残差、第二测量残差与马氏范数的和最小化,以恢复两帧相邻图像之间的相对旋转和位移,进而恢复视觉惯性里程计的尺度。
13、进一步地,所述步骤s3包括:
14、s31:通过gnss获取k-1时刻至k时刻所述车辆的第一经纬度信息以及第二经纬度信息;
15、s32:将所述第一经纬度信息与所述第二经纬度信息转换到大地坐标系下,得到所述第一定位信息与所述第二定位信息,其中,坐标转换公式为:
16、其中λk,hk分别为k时刻的经度信息,纬度信息和高度信息,(xk,yk,zk)为k时刻的大地坐标信息,n为大地坐标信息到地球极点的距离长度,e是自然数常量,其中,所述第一定位信息为(xk-1,yk-1,zk-1),所述第二定位信息(xk,yk,zk)。
17、本技术提出了一种车辆定位的方法,通过将gnss获取到的第一经纬度信息和第二经纬度信息转换到大地坐标系中得到第一定位信息(xk-1,yk-1,zk-1)和第二定位信息(xk,yk,zk),使从gnss中获取到的车辆的定位信息与从vio中获取到的车辆的位置信息在同一坐标系下,便于进行模长的计算。
18、进一步地,所述步骤s4包括:
19、s41:根据所述第一位置信息、所述第二位置信息以及所述第一定位信息、所述第二定位信息计算k-1时刻至k时刻的所述两帧相邻图像的模长比值;
20、s42:根据所述模长比值计算所述vio的权重。
21、本技术提出的一种车辆定位的方法,通过计算出k-1时刻至k时刻的两帧相邻图像的模长比值,而后可以通过模长比值计算vio的权重,通过具体的两帧相邻图像计算出来的vio权重可根据两帧相邻图像之间不同的模长比值改变不同的数值,从而避免了vio获取到的位姿信息在融合时,因权重固定而无法精准定位的问题。
22、进一步地,所述步骤s5包括:
23、s51:根据所述位姿信息构建vio局部约束模型,根据所述绝对定位信息构建gnss全局轨迹约束模型;
24、s52:根据所述vio局部约束模型、所述gnss全局轨迹约束模型以及所述权重计算所述车辆的实时位置信息。
25、进一步地,所述步骤s51包括:
26、s511:获取所述初始化后的vio的vio测量值vio观测方程以及gnss的gnss测量值gnss观测方程
27、s512:根据所述vio测量值以及所述vio观测方程构建所述vi0局部约束模型:
28、s513:根据所述gnss测量值以及所述gnss观测方程构建所述gnss全局轨迹约束模型:
29、其中χ以第一帧图像为起点,代表vio的观测状态预测,χ在k时刻的观测状态预测由k时刻以及k时刻与k-1时刻的位姿变化信息计算得到。
30、进一步地,所述步骤s52包括:
31、s521:根据所述vio局部约束模型、所述gnss全局轨迹约束模型以及所述权重计算所述车辆的实时位置信息的算法为:
32、
33、其中,wt为t个计算出来的所述权重。
34、第二方面,本技术提出一种车辆定位的装置,所述装置包括:
35、初始化模块:用于对vio中相机与imu分别采集到的第一图像特征点信息与第一状态信息进行初始化,并得到初始化后的vio;
36、第一获取模块:用于通过初始化后的vio获取k-1时刻至k时刻的两帧相邻图像的车辆的第一位置信息与车辆的第二位置信息;
37、第二获取模块:用于通过gnss获取k-1时刻至k时刻所述车辆的第一定位信息与第二定位信息;
38、计算模块:根据所述第一位置信息、所述第二位置信息以及所述第一定位信息、所述第二定位信息计算vio的权重;
39、定位模块:将所述vio的权重代入因子图中,融合两个相邻时刻下所述初始化后的vio获取的所述车辆的位姿信息与所述gnss获取的所述车辆的绝对定位信息,以得到所述车辆的实时位置信息。
40、第三方面,本技术提供一种电子设备,包括处理器以及存储器,该存储器存储有计算机可读取指令,当计算机可读取指令由处理器执行时,运行如上述第一方面提供的方法中的步骤。
41、第四方面,本技术提供一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时运行如上述第一方面提供的方法中的步骤。
42、有益效果:本技术提供的一种车辆定位的方法、装置、电子设备及存储介质,通过对vio中的相机和imu分别采集到的第一图像特征点信息与第一状态信息进行初始化,解决了相机无法得到视觉惯性里程计的尺度的问题,得到初始化后的vio,可以恢复两帧相邻图像之间的相对旋转和位移,进而恢复视觉惯性里程计的尺度。而后使用初始化后的vio获取k-1时刻至k时刻的两帧相邻图像的车辆的第一位置信息与车辆的第二位置信息,并通过gnss获取k-1时刻至k时刻的车辆的第一定位信息与第二定位信息,k-1时刻至k时刻为相邻的两个时刻点,gnss获取到的第一定位信息与第二定位信息表示车辆在经纬度上的绝对位置,而初始化后的vio获取到的车辆的第一位置信息与第二位置信息则为车辆在世界坐标系下的位置,通过第一位置信息、第二位置信息以及第一定位信息、第二定位信息可以计算出两帧相邻图像之间的模长比值,从而根据模长比值计算出vio的权重,将vio的权重代入因子图中融合两帧相邻图像的车辆的位姿信息和定位信息,在gnss定位信息精度不足时,vio的权重占比较多,在gnss定位信息精度较高时,vio的权重占比较小,避免了vio获取到的位姿信息在融合时,因权重固定而无法精准定位的问题。因此,本技术中提出的一种车辆定位的方法,通过自动计算vio的权重,在采用因子图中进行gnss和vio的融合定位计算时,引入合适的vio的权重,可得到精准的车辆实时位置信息,具有提高自动驾驶汽车的定位精度的有益效果。
- 还没有人留言评论。精彩留言会获得点赞!