基于无人机多源传感器融合的小麦营养状况诊断方法
本发明涉及小麦营养状况诊断,具体为基于无人机多源传感器融合的小麦营养状况诊断方法。
背景技术:
1、小麦在世界上广泛种植,是重要的口粮品种。随着全球气候变化和人类活动的加剧,农业生产面临越来越大的挑战。氮素是植物生长中关键的营养元素,因此对氮素的准确估算和管理是农业生产的关键问题之一。氮素是作物生长以及品质形成的重要营养元素,在生产中农民为获得小麦高产,往往会施入过量氮肥。氮肥的施用不当不仅影响小麦的生长发育和产量形成,而且增加了农资投入,从而大大降低经济回报。氮肥以n2o的形式损失产生大量温室气体。因此,快速,实时,准确诊断作物氮素营养状况,对优化氮肥管理措施,提高氮肥利用效率和作物生产力具有重要价值。
2、作物氮素营养诊断是确定氮肥施用量的重要依据。临界氮浓度实现了作物阶段生长的最大生物量,而对氮素的最低需求水平,是作物高产与高效利用的适宜氮素浓度,为确定适宜的氮素营养状况标准提供了规范化的方法。氮营养指数(nni)源自于临界氮浓度,该指标主要用于评价作物的氮素营养的丰缺状况,是准确诊断作物氮素营养状况的重要技术手段传统小麦氮素诊断方式需人工调查采样和实验室化学分析,存在周期长、成本高、代表性差的问题,严重影响了各级政府的农业氮肥指导和政策制定。
3、随着现代计算机科学及传感器技术的发展,新型遥感监测技术广泛应用于作物氮素诊断。通常,近地遥感技术监测精度高,监测范围有限,导致监测效率大大降低。卫星遥感平台适用于大面积监测,但其重访周期长,易受天气影响,空间分辨率不高,导致监测的精度以及时效性有待提高。无人机平台凭借其时空分辨率高,时效性强,运行成本低的优势,为地面及卫星遥感监测提供了一种解决方案。同时,无人机遥感平台可以灵活搭载各类小型传感器同步获取多源遥感信息,如多光谱相机,热红外相机,数码相机,激光雷达等。多源遥感信息实现优势互补,弥补单一遥感数据和分类方法的缺陷,大大提高作物遥感估算和识别精度。先前的研究表明,无人机自由选择搭载小型化传感器可以用来实现对作物氮素营养状况的监测。然而,随着传感器技术的成熟,利用不同传感器获取数据数量和类型在不断增加。尤其数据分布在不同时间和空间维度的下,各类遥感传感器在不同分辨率下采集到的数据存在差异,因此如何将不同类型的遥感数据有效整合,准确估算nni是急需解决的问题。传统的数据分析方式主要是利用线性回归模型,其难以集成和分析复杂的数据集,模型的精度和稳定性存在限制。随着遥感技术和机器学习算法的发展,利用多源遥感传感器和机器学习方法来估算nni的研究成为热点。机器学习(ml)可以为复杂的数据集中的非线性问题提供思路。先前的研究表明高斯回归,随机森林,支持向量机和bp神经网络等机器学习算法被用于n素形态和nni的估计。
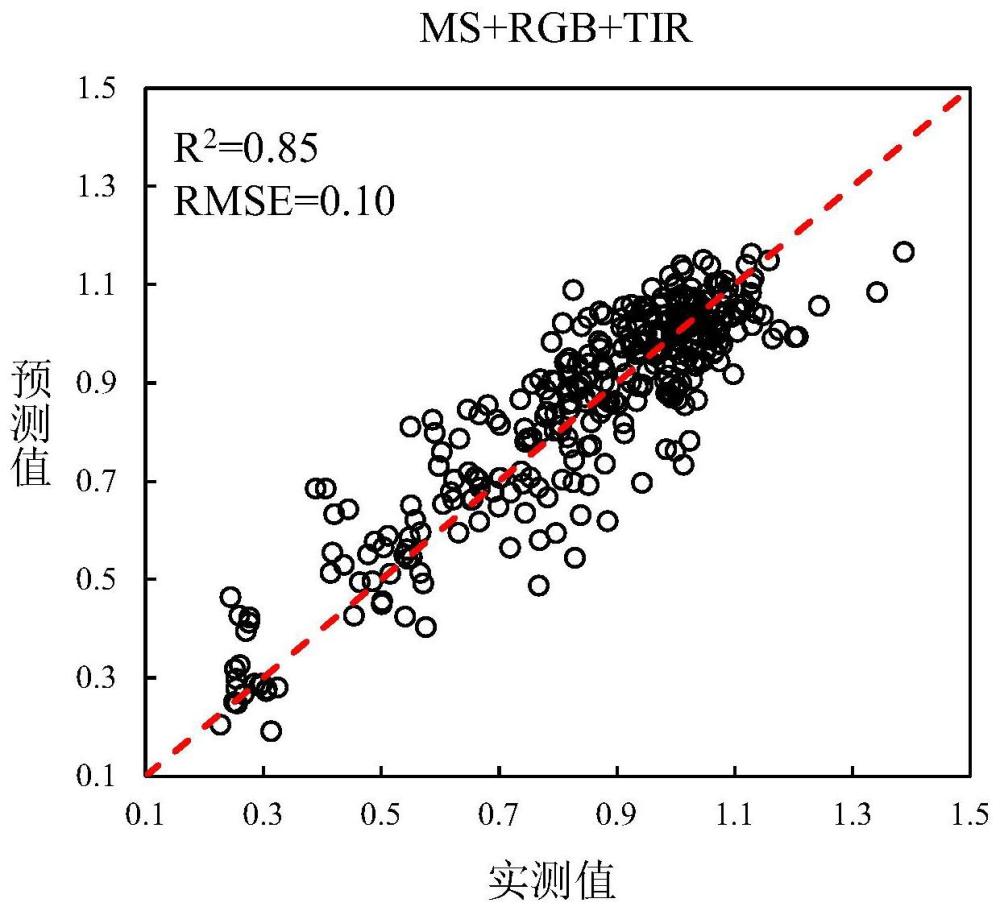
4、不同传感器中包含的光谱,热红外和纹理特征的组合对作物表型性状估算和氮素营养状况评估具有正向作用,多传感器结合较单一传感器有利于解决光饱和问题。但目前将ms、rgb和tir等多源传感器数据融合进行nni预测研究还相对较少。另外,利用多传感器特征结合机器学习算法估算作物性状以及营养情况的同时,多传感器会产生大量的图像信息。高维数据包括的特征变量越来越多,造成模型更加复杂,稳定性和适用性低。在训练模型时通常需要先对数据去冗余,提取一些关键变量,对优化模型和降低模型的复杂程度具有重要意义。然而很少有研究将特征筛选方案用于多传感器结合的框架内,并且尚未尝试将其应用于小麦nni估算及氮素诊断。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了基于无人机多源传感器融合的小麦营养状况诊断方法具备时空分辨率高,时效性强,运行成本低等优点,解决了背景技术中提出的问题。
3、(二)技术方案
4、为实现上述目的,本发明提供如下技术方案:
5、本发明要解决的另一技术问题是提供基于无人机多源传感器融合的小麦营养状况诊断方法,包括以下步骤:
6、1)大田数据采集:于返青期,拔节期,孕穗期和开花期,每个小区随机选取20株小麦,在室内按照茎、叶、穗等不同器官进行分离,80℃下烘干至恒重,对烘干后的干物质样品称重,粉碎后用于氮素测定,各器官采用凯式定氮法测定各器官的氮含量。
7、2)计算氮营养指数:氮素营养指数是小麦氮浓度实测值与临界氮浓度的比值,反映了小麦的氮素状况。根据作物氮浓度诊断,作物氮状态依赖于临界氮浓度(%nc)的概念,它被定义为实现植物最大生长所需的氮浓度。
8、%nc=ac pdm-b
9、其中,pdm为地上部生物量(t ha-1),%nc为临界氮浓度,ac和b是估计参数,ac为干物质为t ha-1时的临界氮浓度,b表示曲线斜率参数。
10、nr=ncna-nna
11、其中,ncna为临界氮浓度条件下的氮积累量,nna为不同处理的实际氮积累量。
12、3)无人机数据采集:采用大疆m600pro系列六旋翼无人机,搭载k6多光谱相机和thermal capture 2.0热红外相机。k6多光谱相机可自由组合6组阵列,选择搭载蓝光(450±10nm)、绿光(550±10nm)、红光(685±10nm)、红边(725±10nm)、近红外(780±10nm)5个多光谱通道和1个4384像素×3288像素rgb原色通道。thermal capture 2.0热红外相机(flir systems inc.,oregon,usa),镜头为19毫米,像素分辨率为640×512vox,像素尺寸为17μm,45°h×37°v视场(fov),光谱范围为7.5-13.5μm。相机工作温度范围为-40℃至+80℃。
13、4)图像预处理:用mapir相机控制内核软件对获取的无人机多光谱图像进行预处理,将原始图像转换tif格式的多光谱图像;采用pix4dmapper软件对无人机rgb、ms和tir图像进行校正和拼接。为提高图像的垂直精度和水平精度,在图像拼接过程中利用控制点进行地理位置几何校正,并生成高质量密集点云,噪声滤波用于去除密集测量点云中的异常高度点,对多光谱图像和热红外图像进行辐射校正,将原始的光谱dn值转换成反射率和温度值,利用arcmap10.8软件计算植被指数和温度参数。将拼接的rgb图像作为基准影像对热红外图像进行几何校准。制作试验小区矢量文件,根据试验品种顺序对矢量文件进行编号,依次提取冠层光谱信息和温度信息,本研究选择的植被指数,rgb颜色指数和热红外温度参数是先前广泛用于nni及作物氮素的监测。
14、5)特征筛选:cars是一种变量选择方法,试图模仿达尔文的进化论“适者生存”原则。每一组光谱波段被视为独立个体,自适应重加权采样(ars)技术识别出pls模型中具有较大绝对回归系数的波长点,去除任何低加权波长点,最后通过交叉验证和逐次优化,选择回归模型中最准确的子集。
15、6)机器学习算法:采用随机森林回归数据分析方法,该方法能够解释两个以上的变量对因变量的影响,由多个决策树组成,一般采用单棵树结果的平均值作为输出结果;利用70%的数据集进行模型构建,30%的数据集进行验证;采用决定系数(r2)和均方根误差(rmse)评价预测值与实测值的拟合性,一般来说,预测能力较好的模型r2值较高,rmse值较低;计算公式如下:
16、
17、
18、优选的,所述步骤三中地面数据和无人机数据采集时间同步,为稳定获取小麦冠层光谱信息,于当地时间中午11:00—13:00,天气晴朗,无云无雨,低风速的条件下进行拍摄。飞行高度设置为30m,拍照方式为等时触发,航向重叠度75%,旁向重叠度70%。在无人机飞行航线中放置四块靶标布,并使用手持式asd对铺设反射率为5%、20%、40%和70%的靶标布进行校准。利用手持式温度仪获取黑色、灰色和白色校准板的温度值,用于校准热红外传感器。经过辐射校正后,测量精度为±1.5℃。
19、优选的,所述步骤四中基于多光谱传感器的blue-450、green-550、red-685、red-edge-725和nir-780波段,以及基于rgb传感器的blue、green、red和热红外传感器提取纹理特征。所述步骤五具体为:利用cars算法对各传感器特征进行筛选,基于多光谱传感器进行特征筛选,分别选择ndre,gndvi,550-mean,550-variance,685-mean,725-contrast,725-mean,780-mean共筛选出8个敏感特征,基于rgb传感器进行特征筛选,分别选择exgr,ngrdi,r-mean,g-variance,b-mean,共筛选出5个敏感特征;基于tir传感器进行特征筛选,分别选择ctd,nrct,t-correlation,共筛选出3个敏感特征。
20、优选的,所述步骤六中可使用的数据分析方法除了上述的随机森林回归法,还有偏最小二乘回归以及极限学习机算法。
21、(三)有益效果
22、与现有技术相比,本发明提供了基于无人机多源传感器融合的小麦营养状况诊断方法,具备以下有益效果:
23、该基于无人机多源传感器融合的小麦营养状况诊断方法,通过可以灵活搭载各类小型传感器同步获取多源遥感信息,多源遥感信息实现优势互补,弥补单一遥感数据和分类方法的缺陷,大大提高作物遥感估算和识别精度。
- 还没有人留言评论。精彩留言会获得点赞!