用于提升星基增强服务精度的GPS卫星伪距偏差修正方法
本发明总的来说涉及卫星导航。具体而言,本发明涉及一种用于提升星基增强服务精度的gps卫星伪距偏差修正方法。
背景技术:
1、在卫星导航系统中,不同技术状态的接收机会对同一卫星下行导航信号产生大小、符号不同的伪距测量常数偏差,即伪距偏差。伪距偏差产生的根本原因是导航卫星下行信号的非理性特性,对于卫星导航星基增强服务,伪距偏差是一项重要的误差源。
2、星基增强系统通常采用基于载波相位平滑双频伪距的运动学方法计算全球定位系统(gps)卫星的钟差改正数和轨道改正数。以星基增强系统参考站i和gps卫星j为例,gps星基增强改正数计算的观测方程可以表示为下式:
3、
4、其中,表示l1p和l2p伪距的双频无电离层组合观测值,由于监测站坐标精确已知,卫星位置可用导航电文计算得到,因此卫星与地面接收机的几何距离可直接计算;δtj和δti分别表示卫星钟差以及接收机钟差,其中卫星钟差也可由导航电文计算得到;δtrop、δpco、δrel分别表示对流层延迟、接收机天线相位中心偏差和相对论延迟等系统误差,ε表示多路径误差和噪声。
5、从双频伪距观测量中扣除星地几何距离、卫星钟差以及其他各项系统误差后,得到伪距残差,表示为由于导航电文中的卫星轨道和钟差信息存在一定误差,因此伪距残差中除了包含测站接收机钟差和多径噪声外,还包括导航电文的钟差误差和星历误差,伪距残差的公式可以表示为下式:
6、
7、其中,表示统一修正卫星钟差误差和卫星星历误差在全部监测站视线方向投影的平均值,即卫星钟差改正数。星基增强系统利用广域分布的参考站对所有可视gps卫星的观测数据,采用单点倒定位方法,固定主控站接收机钟差,利用最小二乘法实时求解参考站接收机钟差以及卫星钟差改正数。
8、星基增强系统是通过修正gps基本导航电文中的卫星钟差参数误差和轨道参数误差来实现对服务区gps用户的增强。如果参与改正数计算的星基增强系统参考站接收机没有完全参照gps icd文件中的建议调整接收机的参数配置,则参考站接收机与gps地面运控接收机之间必定存在相对的伪距偏差,而l1p和l2p这两个频点上的伪距偏差会经双频组合系数倍数放大后影响改正数计算。考虑l1p和l2p频点上的伪距偏差,可以将星基增强改正数计算的双频伪距观测方程转化为下式:
9、
10、其中,表示l1p和l2p伪距的双频无电离层组合观测值,bias1和bias2分别表示参考站接收机在l1p和l2p频点上的伪距偏差,和表示双频组合的系数。可见,当以l1p/l2p双频伪距观测数据计算sbas改正数时,放大双频组合系数倍数后的伪距偏差会成为重要的误差源,在进行多站多星的最小二乘解算时,该误差会被卫星钟差改正数吸收,从而对星基增强系统服务精度造成不利影响。
技术实现思路
1、为至少部分解决现有技术中的上述问题,本发明提出一种用于提升星基增强服务精度的gps卫星伪距偏差修正方法,包括下列步骤:
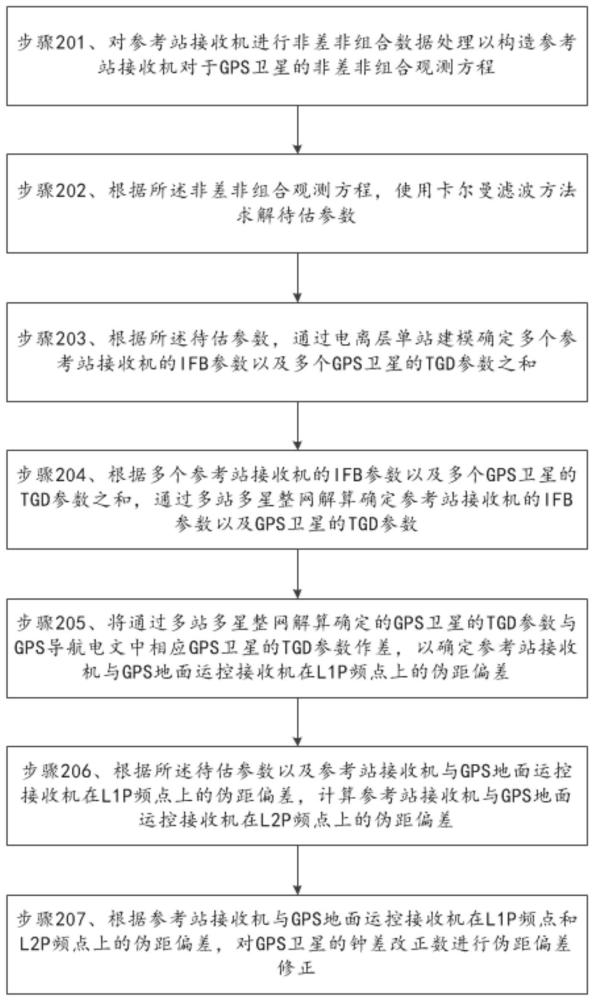
2、对参考站接收机进行非差非组合数据处理以构造参考站接收机对于gps卫星的非差非组合观测方程;
3、根据所述非差非组合观测方程,使用卡尔曼滤波方法求解待估参数;
4、根据所述待估参数,通过电离层单站建模确定多个参考站接收机的ifb参数以及多个gps卫星的tgd参数之和;
5、根据多个参考站接收机的ifb参数以及多个gps卫星的tgd参数之和,通过多站多星整网解算确定参考站接收机的ifb参数以及gps卫星的tgd参数;
6、将通过多站多星整网解算确定的gps卫星的tgd参数与gps导航电文中相应gps卫星的tgd参数作差,以确定参考站接收机与gps地面运控接收机在l1p频点上的伪距偏差;
7、根据所述待估参数以及参考站接收机与gps地面运控接收机在l1p频点上的伪距偏差,计算参考站接收机与gps地面运控接收机在l2p频点上的伪距偏差;以及
8、根据参考站接收机与gps地面运控接收机在l1p频点和l2p频点上的伪距偏差,对gps卫星的钟差改正数进行伪距偏差修正。
9、其中,术语“ifb参数”是指不同频率信号之间的接收机硬件延迟参数,术语“tgd参数”是指不同频率信号之间的卫星硬件延迟参数。
10、在本发明一个实施例中规定,对参考站接收机进行非差非组合数据处理以构造非差非组合观测方程包括:
11、对参考站接收机i以及gps卫星j构造第一至第四非差非组合观测方程,其中第一方程表示为下式:
12、
13、第二方程表示为下式:
14、
15、第三方程表示为下式:
16、
17、第四方程表示为下式:
18、
19、其中,和分别表示t时刻参考站接收机i对gps卫星j在l1p和l2p频点的伪距观测值,表示t时刻参考站接收机i与gps卫星j的几何距离,δtj(t)和δti(t)分别表示t时刻gps卫星j和参考站接收机i的钟差,和分别表示gps卫星j在l1p和l2p频点的码偏差参数,和分别表示参考站接收机i在l1p和l2p频点的码偏差参数,表示t时刻参考站接收机i和gps卫星j星地连线方向上的电子总含量,fl1p和fl2p分别表示l1p和l2p频点的频率值,和分别表示参考站接收机与gps地面运控接收机在l1p和l2p频点的伪距偏差值,表示t时刻参考站接收机i和gps卫星j星地连线方向上的对流层延迟,表示t时刻参考站接收机i天线相位中心偏差、固体潮、相对论等导致的公共误差,和分别表示t时刻l1p和l2p频点伪距测量多径与噪声,λl1p和λl2p分别表示l1p和l2p频点的波长,和分别表示t时刻参考站接收机i对gps卫星j在l1p和l2p频点的载波相位观测值,和分别表示参考站接收机i在l1p和l2p频点的相位延迟,和分别表示gps卫星j在l1p和l2p频点的相位延迟,和分别表示参考站接收机i对gps卫星j的载波相位测量模糊度参数,和分别表示t时刻l1p和l2p频点载波相位测量噪声;
20、由于gps导航电文中的卫星钟差参数以l1p/l2p双频无电离层组合为基准,第一方程以及第二方程满足下列条件:
21、
22、
23、令将第一方程以及第二方程变换为第五和第六方程,表示为下式:
24、
25、
26、其中,表示参考站接收机与gps地面运控接收机在l2p频点的伪距偏差残余量,满足下式:
27、以及
28、对于第三和第四方程,令
29、将第三和第四方程变换为第七和第八方程,表示为下式:
30、
31、
32、在本发明一个实施例中规定,所述待估参数包括:载波相位模糊度参数和天顶方向对流层延迟参数、各历元时刻参考站接收机i的钟差参数δti、各历元时刻参考站接收机i和gps卫星j星地连线方向上的l1p频点斜路径电离层延迟参数以及参考站接收机与gps地面运控接收机在l2p频点的伪距偏差残余量。
33、在本发明一个实施例中规定,根据所述待估参数,通过电离层单站建模确定多个参考站接收机的ifb参数以及多个gps卫星的tgd参数之和包括:
34、将各历元时刻参考站接收机i和gps卫星j星地连线方向上的l1p频点斜路径电离层延迟参数表示为下式:
35、
36、其中,
37、使用单参考站接收机多历元数据,对电离层进行建模处理,计算电离层延迟模型计算值以及
38、将各历元时刻参考站接收机i和gps卫星j星地连线方向上的l1p频点斜路径电离层延迟参数与所述电离层延迟模型计算值作差,以确定到多个参考站接收机的ifb参数以及多个gps卫星的tgd参数之和,表示为下式:
39、
40、在本发明一个实施例中规定,根据多个参考站接收机的ifb参数以及多个gps卫星的tgd参数之和,通过多站多星整网解算确定参考站接收机的ifb参数以及gps卫星的tgd参数包括:
41、根据多个参考站接收机的ifb参数以及多个gps卫星的tgd参数之和,使用最小二乘整网平差进行解算以确定参考站接收机的ifb参数以及gps卫星的tgd参数,其中将参考站接收机i和gps卫星j的最小二乘平差的观测方程表示为下式:
42、
43、其中,表示gps卫星的tgd参数,表示参考站接收机的ifb参数。
44、在本发明一个实施例中规定,将通过多站多星整网解算确定的gps卫星的tgd参数与gps导航电文中相应gps卫星的tgd参数作差,以确定参考站接收机与gps地面运控接收机在l1p频点上的伪距偏差包括:
45、将通过多站多星整网解算确定的gps卫星j的tgd参数与gps导航电文中相应gps卫星的tgd参数作差,表示为下式:
46、
47、其中,表示使用多站多星整网解算得到的gps卫星j的tgd参数,表示gps导航电文中播发的gps卫星j的tgd参数,表示参考站接收机与gps地面运控接收机在l1p频点的伪距偏差;和/或
48、根据所述待估参数以及参考站接收机与gps地面运控接收机在l1p频点上的伪距偏差,计算参考站接收机与gps地面运控接收机在l2p频点上的伪距偏差包括:
49、根据参考站接收机与gps地面运控接收机在l2p频点的伪距偏差残余量,计算多个参考站接收机对同一颗gps卫星伪距偏差残余量的平均值以作为gps卫星的l2p频点的伪距偏差残余量,表示为下式:
50、以及
51、根据参考站接收机与gps地面运控接收机在l1p频点上的伪距偏差,通过参考站接收机与gps地面运控接收机在l1p频点和l2p频点伪距偏差的比例关系,计算参考站接收机与gps地面运控接收机在l2p频点的伪距偏差表示为下式:
52、
53、在本发明一个实施例中规定,根据参考站接收机与gps地面运控接收机在l1p频点和l2p频点上的伪距偏差,对gps卫星的钟差改正数进行伪距偏差修正包括:
54、从gps卫星钟差改正数中扣除l1p/l2p双频组合系数倍的伪距偏表示为下式:
55、
56、其中,表示星基增强系统计算的gps卫星钟差改正数,和表示双频组合的系数,和分别表示参考站接收机与gps地面运控接收机在l1p和l2p频点的伪距偏差,表示伪距偏差修正处理后播发给用户的gps卫星钟差改正数。
57、本发明还提出一种用于提升星基增强服务精度的gps卫星伪距偏差修正系统,包括:
58、参数计算模块,其被配置为执行下列动作:
59、对参考站接收机进行非差非组合数据处理以构造参考站接收机对于gps卫星的非差非组合观测方程;
60、根据所述非差非组合观测方程,使用卡尔曼滤波方法求解待估参数;
61、根据所述待估参数,通过电离层单站建模确定多个参考站接收机的ifb参数以及多个gps卫星的tgd参数之和;以及
62、根据多个参考站接收机的ifb参数以及多个gps卫星的tgd参数之和,通过多站多星整网解算确定参考站接收机的ifb参数以及gps卫星的tgd参数;
63、伪距偏差计算模块,其被配置为执行下列动作:
64、将通过多站多星整网解算确定的gps卫星的tgd参数与gps导航电文中相应gps卫星的tgd参数作差,以确定参考站接收机与gps地面运控接收机在l1p频点上的伪距偏差;以及
65、根据所述待估参数以及参考站接收机与gps地面运控接收机在l1p频点上的伪距偏差,计算参考站接收机与gps地面运控接收机在l2p频点上的伪距偏差;以及
66、偏差修正模块,其被配置为根据参考站接收机与gps地面运控接收机在l1p频点和l2p频点上的伪距偏差,对gps卫星的钟差改正数进行伪距偏差修正。
67、本发明还提出一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序在被处理器执行时执行根据所述方法的步骤。
68、本发明还提出一种计算机系统,其包括:
69、处理器,其被配置为执行机器可执行指令;以及
70、存储器,其上存储有机器可执行指令,所述机器可执行指令在被处理器执行时执行根据所述方法的步骤。
71、本发明至少具有如下有益效果:相比于现有的伪距偏差计算方法有基于并置接收机的伪距偏差计算方法和基于dcb参数的伪距偏差计算方法中,基于并置接收机的伪距偏差计算方法虽然可以计算导航卫星各个频点的伪距偏差,但需要以两台接收机并置部署(零基线或短基线)为前提;基于dcb参数的伪距偏差计算方法虽不需要接收机的并置部署,但该方法无法得到导航卫星各个频点的伪距偏差,只能计算得到导航卫星两个频点上伪距偏差的互差。本发明提出一种用于提升星基增强服务精度的gps卫星伪距偏差修正方法,可以克服星基增强系统参考站接收机与gps地面运控接收机无法并置部署的制约,通过计算得到gps卫星l1p和l2p频点的伪距偏差,在星基增强系统生成的gps卫星钟差改正数中扣除l1p/l2p双频组合后的伪距偏差,实现伪距偏差修正,提升星基增强服务精度。
- 还没有人留言评论。精彩留言会获得点赞!