一种用于边界扫描测试的数据延时控制方法、系统及平台与流程
本发明属于边界扫描测试处理,具体涉及一种用于边界扫描测试的数据延时控制方法、系统及平台。
背景技术:
1、随着芯片、板卡的迭代更新,对测试速率和测试稳定性有了更高的要求,现有的硬件资源具有一定的延时,在延时的影响下,一方面测试速率到达瓶颈,另一方面,由于数据波形边缘常常会出现震荡或抖动的不稳定因素,在tck的上升沿,若为波形边缘采集的数据,将导致测试数据不稳定。
2、当延时太大或测试频率太高,会出现在tck的上升沿读取tdo的数据错位的现象,一方面,tdo的数据需要回到边界扫描控制器读取数据,推出tdo数据时,当延时较大或测试频率太高时,tck时钟的上升沿超前于tdo太大,导致tck的上升沿没有读取对应的tdo数据,进而发生数据错位。
3、当时钟上升沿工作在数据变化的临界边缘,将导致数据采集不稳定,这种临界边缘是由信号延时导致的,加上临界边缘数据稍微有些震荡或抖动,就会导致数据在边界扫描芯片内部的读取出错进而导致数据移位错误或tdo返回到边界扫描驱动电路的fpga读取错误;当不稳定因素导致的读取的错误与待测板外部(extest)测试结果交织在一起的时候,很难判断是读取不稳定导致的问题还是待测板测试本身的连接故障问题。
4、现有的方法存在离线调试过程中没有发现不稳定,而在测试现场,面对成千上万的待测板(dut)时,信号不稳定就凸显出来的问题,这时需要在测试现场排查问题的根源,是读取不稳定还是待测板本身的连接故障的问题,当找到是因为不稳定导致的问题后,这时只能采用降低测试速率的方法达到稳定的目的,浪费了大量的人力物力,测试速率也提不上去,因此需要在离线测试的过程中,解决这些临界不稳定问题。
5、因此,针对以上导致测试数据不稳定及测试速率低的技术问题缺陷,急需设计和开发一种用于边界扫描测试的数据延时控制方法、系统及平台。
技术实现思路
1、为克服上述现有技术存在的不足及困难,本发明方案提供一种用于边界扫描测试的数据延时控制方法、系统及平台,结合驱动电路实现提供可靠的信号驱动能力和信号质量,通过粗调节的方式克服信号延时问题,通过微调节的方式改善信号的稳定性,进而提升测试速率。
2、本发明的第一目的在于提供一种用于边界扫描测试的数据延时控制方法;本发明的第二目的在于提供一种用于边界扫描测试的数据延时控制系统;本发明的第三目的在于提供一种用于边界扫描测试的数据延时控制平台。
3、本发明的第一目的是这样实现的:所述方法包括如下步骤:
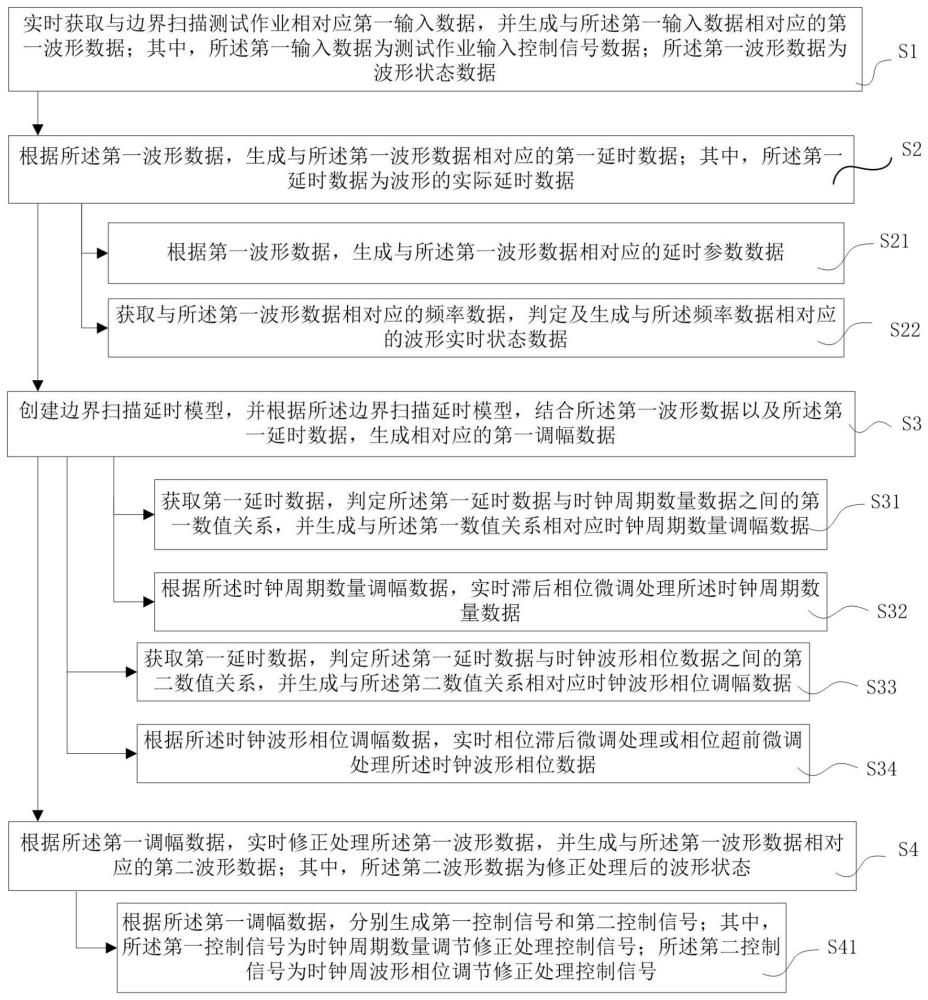
4、实时获取与边界扫描测试作业相对应第一输入数据,并生成与所述第一输入数据相对应的第一波形数据;其中,所述第一输入数据为测试作业输入控制信号数据;所述第一波形数据为波形状态数据;
5、根据所述第一波形数据,生成与所述第一波形数据相对应的第一延时数据;其中,所述第一延时数据为波形的实际延时数据;
6、创建边界扫描延时模型,并根据所述边界扫描延时模型,结合所述第一波形数据以及所述第一延时数据,生成相对应的第一调幅数据;
7、根据所述第一调幅数据,实时修正处理所述第一波形数据,并生成与所述第一波形数据相对应的第二波形数据;其中,所述第二波形数据为修正处理后的波形状态。
8、进一步地,所述根据所述第一波形数据,生成与所述第一波形数据相对应的第一延时数据,还包括:
9、根据第一波形数据,生成与所述第一波形数据相对应的延时参数数据;
10、获取与所述第一波形数据相对应的频率数据,判定及生成与所述频率数据相对应的波形实时状态数据。
11、进一步地,所述测试作业输入控制信号数据为排针形式呈现的信号数据;所述信号数据包括时钟数据、状态信号数据和发送信号数据;
12、所述第一波形数据为进入边界扫描链前的波形状态数据;所述第二波形数据为进入边界扫描链前且经过修正处理的波形状态数据;
13、所述第一调幅数据包括时钟周期数量调幅数据和时钟波形相位调幅数据。
14、进一步地,所述创建边界扫描延时模型,并根据所述边界扫描延时模型,结合所述第一波形数据以及所述第一延时数据,生成相对应的第一调幅数据,还包括:
15、获取第一延时数据,判定所述第一延时数据与时钟周期数量数据之间的第一数值关系,并生成与所述第一数值关系相对应时钟周期数量调幅数据;
16、根据所述时钟周期数量调幅数据,实时滞后相位微调处理所述时钟周期数量数据。
17、进一步地,所述创建边界扫描延时模型,并根据所述边界扫描延时模型,结合所述第一波形数据以及所述第一延时数据,生成相对应的第一调幅数据,还包括:
18、获取第一延时数据,判定所述第一延时数据与时钟波形相位数据之间的第二数值关系,并生成与所述第二数值关系相对应时钟波形相位调幅数据;
19、根据所述时钟波形相位调幅数据,实时相位滞后微调处理或相位超前微调处理所述时钟波形相位数据。
20、进一步地,所述边界扫描延时模型中,设置有边界扫描驱动电路;所述电路中包括第一控制芯片;所述第一控制芯片的ps端和第一数模转换器的输入端连接;所述第一数模转换器的输出端和第一比较器的正输入端连接;所述第一比较器的输出端分别和所述第一比较器的负输入端、第三控制芯片的vref_a引脚连接;
21、所述第一控制芯片的pl端依次和第二控制芯片的b0引脚、b1引脚、b2引脚连接;所述第二控制芯片的a0引脚、a1引脚、a2引脚依次和所述第三控制芯片的b1引脚、b2引脚、b3引脚连接;所述第三控制芯片的a1引脚、a2引脚、a3引脚依次和边界扫描测试口信号端一侧连接;所述边界扫描测试口信号端另一侧和边界扫描测试链连接;
22、所述边界扫描测试链的数据输出接口和所述边界扫描测试口的数据输出接口连接;所述边界扫描测试口的数据输出接口和第二比较器的正输入端连接;所述第二比较器的输出端和所述第一控制芯片中pl端的信号接收接口连接。
23、进一步地,所述根据所述第一调幅数据,实时修正处理所述第一波形数据,并生成与所述第一波形数据相对应的第二波形数据,还包括:
24、根据所述第一调幅数据,分别生成第一控制信号和第二控制信号;其中,所述第一控制信号为时钟周期数量调节修正处理控制信号;所述第二控制信号为时钟周波形相位调节修正处理控制信号。
25、本发明的第二目的是这样实现的:所述系统应用于所述的数据延时控制方法,所述系统包括:
26、第一数据生成单元,用于实时获取与边界扫描测试作业相对应第一输入数据,并生成与所述第一输入数据相对应的第一波形数据;其中,所述第一输入数据为测试作业输入控制信号数据;所述第一波形数据为波形状态数据;
27、第二数据生成单元,用于根据所述第一波形数据,生成与所述第一波形数据相对应的第一延时数据;其中,所述第一延时数据为波形的实际延时数据;
28、创建生成单元,用于创建边界扫描延时模型,并根据所述边界扫描延时模型,结合所述第一波形数据以及所述第一延时数据,生成相对应的第一调幅数据;
29、修正处理单元,用于根据所述第一调幅数据,实时修正处理所述第一波形数据,并生成与所述第一波形数据相对应的第二波形数据;其中,所述第二波形数据为修正处理后的波形状态。
30、进一步地,所述第二数据生成单元,还包括:第一数据生成模块,用于根据第一波形数据,生成与所述第一波形数据相对应的延时参数数据;
31、第一判定生成模块,用于获取与所述第一波形数据相对应的频率数据,判定及生成与所述频率数据相对应的波形实时状态数据;所述测试作业输入控制信号数据为排针形式呈现的信号数据;所述信号数据包括时钟数据、状态信号数据和发送信号数据;所述第一波形数据为进入边界扫描链前的波形状态数据;所述第二波形数据为进入边界扫描链前且经过修正处理的波形状态数据;所述第一调幅数据包括时钟周期数量调幅数据和时钟波形相位调幅数据;
32、和/或,所述创建生成单元,还包括:第二判定生成模块,用于获取第一延时数据,判定所述第一延时数据与时钟周期数量数据之间的第一数值关系,并生成与所述第一数值关系相对应时钟周期数量调幅数据;第一微调处理模块,用于根据所述时钟周期数量调幅数据,实时滞后相位微调处理所述时钟周期数量数据;
33、和/或,所述创建生成单元,还包括:第三判定生成模块,用于获取第一延时数据,判定所述第一延时数据与时钟波形相位数据之间的第二数值关系,并生成与所述第二数值关系相对应时钟波形相位调幅数据;
34、第二微调处理模块,用于根据所述时钟波形相位调幅数据,实时相位滞后微调处理或相位超前微调处理所述时钟波形相位数据;
35、所述边界扫描延时模型中,设置有边界扫描驱动电路;所述电路中包括第一控制芯片;所述第一控制芯片的ps端和第一数模转换器的输入端连接;
36、所述第一数模转换器的输出端和第一比较器的正输入端连接;所述第一比较器的输出端分别和所述第一比较器的负输入端、第三控制芯片的vref_a引脚连接;所述第一控制芯片的pl端依次和第二控制芯片的b0引脚、b1引脚、b2引脚连接;所述第二控制芯片的a0引脚、a1引脚、a2引脚依次和所述第三控制芯片的b1引脚、b2引脚、b3引脚连接;所述第三控制芯片的a1引脚、a2引脚、a3引脚依次和边界扫描测试口信号端一侧连接;所述边界扫描测试口信号端另一侧和边界扫描测试链连接;所述边界扫描测试链的数据输出接口和所述边界扫描测试口的数据输出接口连接;所述边界扫描测试口的数据输出接口和第二比较器的正输入端连接;所述第二比较器的输出端和所述第一控制芯片中pl端的信号接收接口连接;
37、和/或,所述修正处理单元,还包括:第二数据生成模块,用于根据所述第一调幅数据,分别生成第一控制信号和第二控制信号;其中,所述第一控制信号为时钟周期数量调节修正处理控制信号;所述第二控制信号为时钟周波形相位调节修正处理控制信号。
38、本发明的第三目的是这样实现的:包括处理器、存储器以及用于边界扫描测试的数据延时控制平台控制程序;其中在所述的处理器执行所述的用于边界扫描测试的数据延时控制平台控制程序,所述的用于边界扫描测试的数据延时控制平台控制程序被存储在所述存储器中,所述的用于边界扫描测试的数据延时控制平台控制程序,实现所述的用于边界扫描测试的数据延时控制方法。
39、本发明通过方法实时获取与边界扫描测试作业相对应第一输入数据,并生成与所述第一输入数据相对应的第一波形数据;其中,所述第一输入数据为测试作业输入控制信号数据;所述第一波形数据为波形状态数据;根据所述第一波形数据,生成与所述第一波形数据相对应的第一延时数据;其中,所述第一延时数据为波形的实际延时数据;创建边界扫描延时模型,并根据所述边界扫描延时模型,结合所述第一波形数据以及所述第一延时数据,生成相对应的第一调幅数据;根据所述第一调幅数据,实时修正处理所述第一波形数据,并生成与所述第一波形数据相对应的第二波形数据;其中,所述第二波形数据为修正处理后的波形状态;以及与所述方法相应的系统、平台,结合驱动电路实现提供可靠的信号驱动能力和信号质量,通过粗调节的方式克服信号延时问题,通过微调节的方式改善信号的稳定性,进而提升测试速率。
- 还没有人留言评论。精彩留言会获得点赞!