基于多线性扫频速率的速度与距离测量方法
本发明涉及激光雷达测量领域,具体是一种通过多个线性扫频速率的组合,实现单个测量周期内对目标物体的速度与距离无混叠测量方法。
背景技术:
1、激光雷达在自动驾驶、遥感探测、水下目标探测等诸多领域已经得到了广泛的应用。其中,调频连续波(frequency-modulated continuous wave,fmcw)激光雷达通过将本地参考信号与背向散射信号混频,实现信号的相干放大,具有超高的灵敏度,使用低成本探测器就可以实现皮瓦特功率的微弱背向散射信号的探测。和直接探测相比,fmcw激光雷达系统具有一大技术优势,即能够同时实现速度与距离的测量。
2、传统的fmcw激光雷达系统会由于高的多普勒频移而产生严重的速度-距离模糊。根据传统fmcw激光雷达工作原理,由距离引起的拍频fr,和由速度引起的多普勒频移fd,会在中频频谱中产生一对拍频信号。然而,当fd和fr的绝对值大小关系未知时,传统fmcw激光雷达对距离和速度的测量就会出现模糊,因此无法正确评估速度和距离。因此,激光雷达工程师采用了多种技术手段来解决fmcw激光雷达系统中的速度-距离混叠问题。
3、目前有以下几种方法用于解决fmcw激光雷达系统中存在的速度-距离模糊的问题:
4、(1)借助相位分集相干检测技术,通过使用iq调制解调技术,对复接收相干信号中的负频率进行有效识别。但是这种方法需要额外的iq解调器、2×4混频器等硬件设备,增大了系统成本。
5、(2)通过在测试臂上加一个声光移频器,将基带信号搬移到中频,由于声光移频器所带来的频移量是已知的,因此,可以通过对比拍频信号与频移量之间的差值,无混叠地求出多普勒频移fd和距离引起的频差fr。但是这会增大对adc的要求,且当多普勒频移fd大于声光频移量时,该方法失效。
6、(3)通过在fmcw激光雷达发射端加入相位调制,使用伪随机二进制相位编码来克服速度-距离混叠的问题,但是要分辨信号需要一个意思的测量周期,因此会增大信号处理所需时间,同时新引入的相位调制器也增大了系统的成本。
7、总的来说,以上的方案在解决传统fmcw激光雷达中速度-距离混叠问题的同时,又引入了新的硬件设备带区分多普勒频移fd和速度引起的频移fr,增大了系统的成本。有的方法还必须在满足特定条件时才能生效。因此,亟需一种新的方法实现无速度-距离混叠,在保持传统fmcw探测优点的基础上,具有低成本、易实现、适用性普遍的优点。
技术实现思路
1、本发明要解决的问题是克服传统fmcw激光雷达系统中存在的速度-距离混叠的问题,提出以多个不同扫频速率的线性调频信号用作发射光,无模糊地区分出由于速度引起的多普勒频移fd和由于不同距离引起的频率偏移fr,具有低成本、易实现、适用性普遍的优点。
2、本发明的原理是:
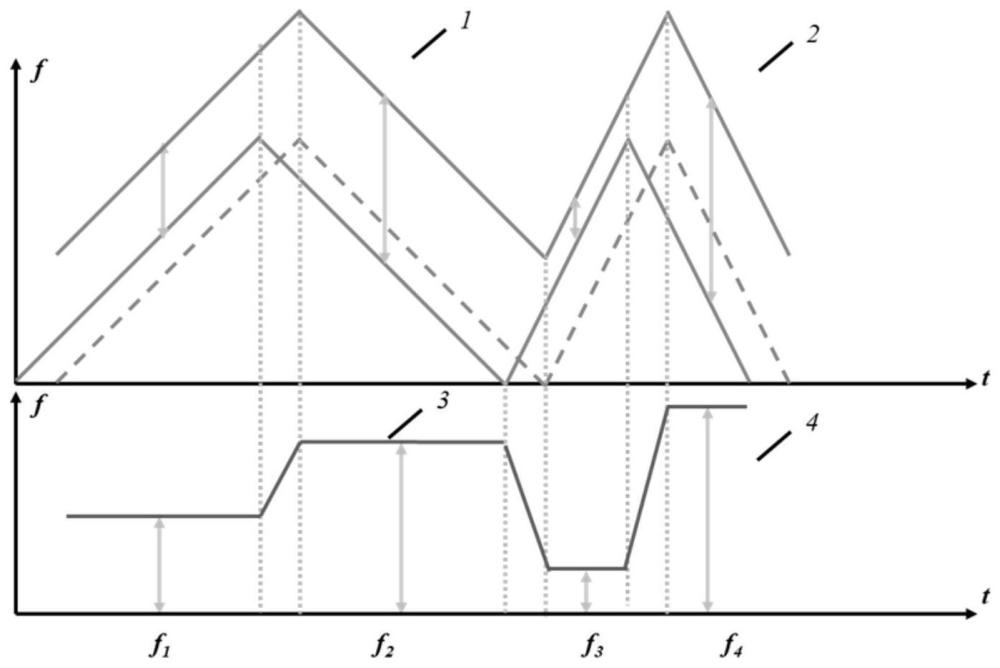
3、通过两组不同线性扫频速率的双向扫频组合,将会分别出现两组拍频信号,分别为|fd±γ1τ|和|fd±γ2τ|,其中γ1和γ2分别表示两个不同的线性扫频速率,τ为信号光与参考光之间的延时。由于扫频速率已知,且对于同一个目标物体而言多普勒频移量是相等的,因此,可以通过两组拍频信号频率的相对关系,无模糊地识别出由于速度引入的多普勒频移和由于距离引起的频移。
4、本发明的技术解决方案如下:
5、一种基于多线性扫频速率的速度与距离测量方法,其特点在于,包括:
6、s1.生成两组不同扫频速率的线性调频信号,且持续时间相同、扫频带宽相同、扫频方向相反,并在时域上交替;
7、s2.将所述两组线性调频信号合波作为发射信号,并将该发射信号分为信号光与参考光;
8、s3.基于双向扫频,所述信号光与参考光进行混频,产生四个拍频信号,即|fd±γ1τ|和|fd±γ2τ|,其中γ1和γ2分别表示两个不同的线性扫频速率,τ为信号光与参考光之间的延时;
9、s4.通过对所述拍频信号差分处理,区分出多普勒频移量和距离引起的频移量。
10、进一步,所述步骤s4.通过对所述拍频信号差分处理,区分出多普勒频移量和距离引起的频移量,具体步骤如下:
11、s4.1按照频率从小到大排列,获得拍频信数组fb,数组元素为{fb1,fb2 fb3 fb4};
12、s4.2对所述拍频信号数组差分,获得新的数组δf,数组元素为{δf(1)=fb2-fb1,δf(2)=fb3-fb2,δf(3)=fb4-fb3},并记录fb的最大值fb(4);
13、s4.3计算差分拍频数组的后两项之比,验证是否满足如果满足,则差分数组最后一项δf(3)=(γ2-γ1),求解延时τ和速度引起的多普勒频移fd;如果不满足,再次计算temp=2×fb(4)-δf(2),并验证该变量是否满足条件若满足,则说明差分数组最后一项δf(3)=(γ2-γ1)τ,倒数第二项为fd+(γ2-γ1)τ,两项之和为多普勒频移fd,解耦合得到距离引起的频移fr;否则,差分数组最后一项δf(3)=2fd,该项的一半为多普勒频移,解耦合得到距离引起的频移fr。
14、所述的激光光源采用分布式反馈激光器(distributed feedback laser,dfb),分布布拉格反射激光器(distributed bragg reflector,dbr)或垂直腔面发射激光器(vertical cavity surface emitting laser,vcsel)。
15、所述的线性调频信号采用内调制预失真矫正、电光调制器外调制、注入锁定等方法产生,具有高扫频线性度的特点,且已知两组双向扫频信号的扫频速率和扫频周期。
16、所述fmcw探测系统可以用于自由空间中目标物体速度和距离的探测,或光纤链路中反射点位置和振动的探测。
17、与现有技术相比,本发明具有以下优点:
18、1.本发明不引入额外硬件装置,系统复杂度低、成本低。
19、2.本发明相比于用额外的声光移频器克服速度-距离模糊的方案,不会增大adc的带宽需求,可以在更低下实现速度和距离的无模糊识别。
20、3.本发明相比于伪随机二进制相位编码来克服速度-距离混叠的方案,只需要在一次测量周期内就可以实现速度和距离的无模糊测量。
技术特征:
1.一种基于多线性扫频速率的速度与距离测量方法,其特征在于,包括:
2.根据权利要求1所述的基于多线性扫频速率的速度与距离测量方法,其特征在于,所述步骤s4.通过对所述拍频信号差分处理,区分出多普勒频移量和距离引起的频移量,具体步骤如下:
3.根据权利要求1所述的基于多线性扫频速率的速度与距离测量方法,其特征在于,所述步骤s1中采用分布式反馈激光器、布拉格反射激光器或垂直腔面发射激光器,采用内调制预失真矫正、电光调制器外调制、注入锁定产生所述的线性调频信号。
技术总结
本发明是一种基于多线性扫频速率的速度与距离测量方法,通过生成两组不同扫频速率且持续时间相同、扫频带宽相同、扫频方向相反,并在时域上交替的线性调频信号,将其作为信号光和参考光用于调频连续波探测。基于双向扫频,当信号光与参考光进行混频,产生四个拍频信号,即|f<subgt;D</subgt;±γ<subgt;1</subgt;τ|和|f<subgt;D</subgt;±γ<subgt;2</subgt;τ|,其中γ<subgt;1</subgt;和γ<subgt;2</subgt;分别表示两个不同的线性扫频速率,τ为信号光与参考光之间的延时;通过对这四个拍频信号差分处理,仅需要通过简单的条件判断就可以区分出多普勒频移量和距离引起的频移量,在不增加硬件成本的前提下克服传统调频连续波探测中常见的速度‑距离模糊问题。
技术研发人员:吴侃,曹先益,陈建平,孙建锋,胡思奇
受保护的技术使用者:上海交通大学
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!