一种基于电容式柔性压力传感器的足部三维力测量装置
本发明涉及压力测量领域,具体为一种基于电容式柔性压力传感器的多足机器人足部三维受力测量装置。
背景技术:
1、多足机器人足部的三维受力测量一直以来都是机器人领域的热门方向,然而当前市场上的多足机器人普遍缺乏足部三维受力测量装置。某些液压驱动式多足机器人采用液压驱动机构的受力计算足部的受力情况,但是单个压力传感器也只能测量一维的力,想要得到三个维度的受力情况需要在机器人不同位置放入多个压力传感器,不但缺乏可移植性,且抗干扰能力也较差。而由电机驱动的多足机器人的足部压力测量目前采用较多的是在足尖处安装气囊,在多足机器人触地时会压缩气囊从而导致气压的变化,通过测量气压的变化便可以计算出受力大小,但是受力的方向却无法测量,且传感器漂移比较严重。而多足机器人足部的三维受力测量目前则尚未得到完美的解决。
2、202210131632.6,一种三维压力测量方法。其中,该测量方法包括:获取施加力:施力半球部件所受到的施加力f;转换施加力:根据获取的施加力f,通过n个压力传感器将电压信号转化为对应的压力值(fz1,fz2,fz3,fz4);求解三维力:根据该压力值(fz1,fz2,fz3,fz4)进行解耦算法求解,得到三维力(fx,fy,fz)。本技术利用了半球结构进行整个模型解耦,可以同时实现小体积以及以柔性材料制作的优点,便携式三维压力的测量,还可以实现平面内多点测量的传感阵列形式。
3、上述专利利用四个处于同一平面的压力传感器,依据受力平衡与力矩平衡计算半球结构所受三维力的大小。但在实际使用过程中,半球结构受力中心点的位置会影响力矩平衡计算中力臂的长度,从而对三维力的测量结果产生影响。而且,如采用柔性材料还需根据所受合外力补偿材料形变引起的力臂变化。上述专利对传感器阵列的数据仅仅是数值上的相加,因此只能用于测量平面上的受力。
4、本发明针对计算力矩平衡需要测量受力中心点位置的问题提出了基于材料形变的测力方法,通过测量平行板电容器电容的变化计算出极板间的相对移动,从而得到弹性材料的形变进而计算出传感器所受三维力的大小。同时,为了消除平行板电容器极板间不平行对电容的影响,本发明设计了刚性极板并在下极板上制作五个电极板,用于计算上下极板间的位移与夹角,从而准确计算出弹性材料的形变,进而由弹性模量与剪切模量计算出传感器所受三维力的大小。
5、本发明针对传感器阵列只能用于测量平面上受力,且单个传感器受力需提前给出合外力作用点的问题,设计了针对机器狗球形足尖的足部三维力计算方法。通过电容变化反映材料的弹性应变,进而得到所受外力,再根据传感器在球形足尖的位置给出了传感器在规定的坐标系下的矢量叠加计算方法,实现机器狗足部所受三维力的大小。
技术实现思路
1、本发明旨在解决以上现有技术的问题。提出了一种基于电容式柔性压力传感器的机器狗足部三维力测量装置。本发明的技术方案如下:
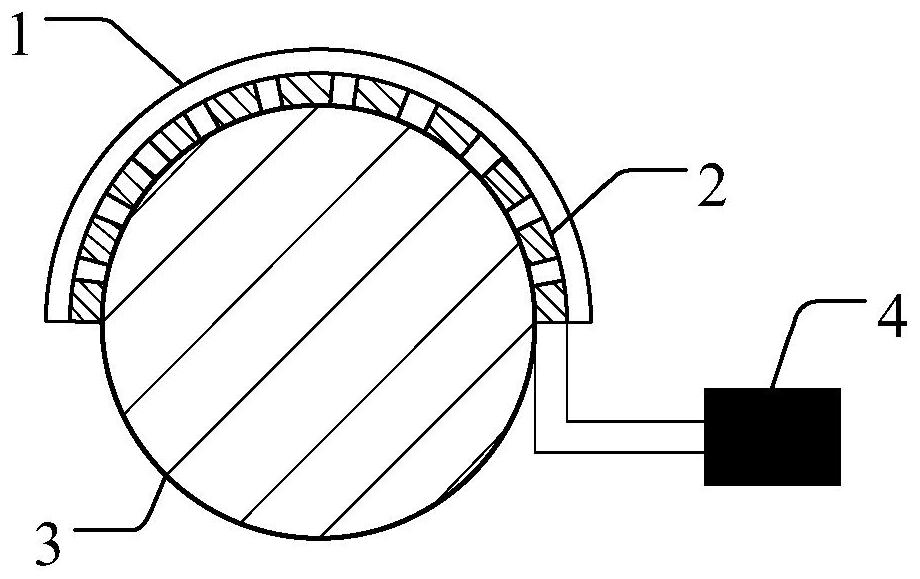
2、一种基于电容式柔性压力传感器的足部三维力测量装置,其包括:球形足尖、电容式柔性压力传感器阵列、外层耐磨橡胶、电容测量电路,所述球形足尖用于为电容式柔性压力传感器阵列提供稳定的附着点,同时球形足尖内部采用网格支撑结构;所述电容式柔性三维压力传感器阵列由上下层柔性材料衬底和导电线路以及中层的电容式三维压力传感器阵列构成;其中柔性材料衬底用于保护导电线路与传感器,导电线路用于连接传感器与电容测量电路,中层的电容式三维压力传感器阵列用于测量不同位置的受力情况;所述外层耐磨橡胶则包裹在上层柔性材料外,用于减小振动和保护传感器;所述电容测量电路用于根据传感器的不同节点分别测量对应节点传感器的电容值从而计算出该节点处的受力情况。
3、进一步的,所述电容式三维压力传感器包括由金属制成的上极板和下极板,所述上极板的面积大于下极板,下极板由五块金属平板a、b、e、f、g组成,其中平板a(f)用于测量x轴方向的力,平板b(g)用于测量y轴方向的力,平板e用于测量垂直于平面的z轴方向的力。
4、进一步的,所述电容式柔性压力传感器阵列由多个电容式压力传感器和柔性材料构成,电容式压力传感器采用方阵的排布方式排列在两层柔性材料之间,上层柔性材料的下表面制作有按行排布的柔性导电线路,下层柔性材料的上表面制作有按列排布的柔性导电线路,导电线路用于连接电容的上下极板,从而通过电容测量电路测量极板间的电容。
5、进一步的,电容式压力传感器的两个极板之间均匀地分布着pdms材料,设该材料的相对介电常数为εr,则平行板电容器的计算公式为:
6、
7、其中ε0为真空下的绝对介电常数,s为平行板的正对面积,d为平行板的间距;
8、以下极板几何中心为坐标原点,以平行于极板边缘的直线为x轴和y轴,以垂直于xoy平面的直线为z轴建立坐标系;当传感器受到z轴方向的力时,设平行板间距的改变量为δd,平行板的初始间距为d0,则电容的改变量为:
9、
10、电容的相对变化量为:
11、
12、当传感器受到x轴方向的力时,设极板宽度为u,x轴方向位置的改变量为δx,x轴方向的初始位置的正对长度为x0,则电容的改变量为:
13、
14、电容的相对变化量为:
15、
16、当传感器受到y轴方向的力时,y轴方向位置的改变量为δy,y轴方向的初始位置的正对长度为y0,则电容的改变量为:
17、
18、电容的相对变化量为:
19、
20、当传感器受到x轴方向或y轴方向的力时,极板间的距离也会产生变化,δx和δy都很小,极板间距变化量的表达式为:
21、
22、由于δx和δy都很小故认为其平方项的影响可以忽略;
23、测量三个极板电容的相对变化量便可以得到材料在三个方向的应变情况,再结合材料的弹性模量和剪切模量便可以计算出三个方向的受力大小;
24、传感器受到z轴方向力的表达式:
25、
26、其中e为弹性模量,v为传感器上或下极板面积;
27、同理可得x轴和y轴方向的力分别为:
28、
29、
30、其中g为剪切模量。
31、进一步的,所述传感器的灵敏度s为:则x、y、z方向的灵敏度分别为:
32、
33、其中p为压强,sx、sy、sz分别为x、y、z方向的灵敏度。
34、进一步的,所述电容式柔性压力传感器阵列的上下层柔性材料表面分别制作有按行和按列排布的导电线路,分别用于连接电容式压力传感器的上下极板;测量电容时按照不同的行和列依次进行测量,从而依次得到不同节点处的电容,进而计算出不同节点处的三维受力情况,再结合不同节点在球形足尖的几何位置便可以由几何关系计算出足部在三个方向上所受的合力的大小为:
35、f=(fx fy fz)t=∑ai(fxi fyi fzi)t
36、其中fx、fy、fz分别为足部在x、y、z方向的受力大小,fxi、fyi、fzi分别为第i个传感器测得的三维力的大小,ai是以第i个传感器三个坐标轴方向上的单位向量在规定坐标轴下的坐标作为列向量组成的矩阵;
37、进一步的,采用双向扫描的测量方法,双向扫描是先进行单向扫描而后再按照相的反顺序再进行一次扫描,做出如下近似:
38、
39、对完成一次双向扫描的数据采用上述公式进行计算便得到了每个传感器单元在中间时刻的受力情况,在使用时保证主要受力点的采集时刻在中间时刻附近;再结合传感器在球形足尖上的位置分布情况计算出中间时刻足部的受力情况。
40、本发明的优点及有益效果如下:
41、本发明以柔性pdms为电介质层,通过测量电容的变化计算出极板间的相对运动,从而得到弹性材料的压缩应变与剪切应变,进而计算出传感器所受三维力的大小。同时,平行板电容器在使用过程中可能出现极板间不平行的问题,而极板倾斜会影响电容的大小从而影响传感器测量的准确性。为此,将传感器极板设计成刚性,并制作了带有五个电极板的下极板和一个电极板的上极板。刚性极板可以增加电极板间的位置约束条件,从而根据五个电容器的数值计算上下极板间的平动以及极板间的夹角,进而得到弹性材料准确的压缩应变与剪切应变。同时,采用传感器阵列进行测量可以把受力分散到多个传感器上,一定程度上提高了系统的鲁棒性。最后,结合传感器在机器狗足尖的位置给出了多传感器数据融合方案,实现机器狗足部三维力的测量。
- 还没有人留言评论。精彩留言会获得点赞!