一种智轨列车道路路基沉降机器视觉检测方法及系统与流程
本发明属于路基沉降检测,具体涉及一种智轨列车道路路基沉降机器视觉检测方法及系统。
背景技术:
1、路基沉降检测数据是道路建设质量评定的重要指标,为路基变化趋势提供重要的基础资料。
2、工程实践中常用的道路路基沉降检测方法有沉降板测量法、横剖测量法、分层沉降法,随着科技的发展,又出现了光纤传感器测量法、卫星遥感测量法、视觉测量法等。其中,沉降板测量法具有易于操作、造价低的优势,但沉降板需要在施工过程中埋设在路基内,且每一个埋设环节都要严格控制,从埋设时机的选择、初始数据的采集,从土坑的开挖到沉降板的放置,从土坑的尺寸大小到回填土的夯实均需严格把关,这些都直接影响到沉降监测数据的可靠性,且由于施工过程复杂,其损坏率高达 68.7%;横剖测量法在小断面测量中应用较多,并且横剖测量法、分层测量法这两种人工测量方法在测量过程中均须严格按照规范进行,测量精度对环境依赖性较大,极易受到风力、湿度等环境因素的影响,测试质量较难控制,测量稳定性不高;光纤传感器测量法是基于光通信技术发展而来的,在国防、航天领域应用广泛,可通过光纤弯曲曲率计算路基沉降量,具有测量距离长,测量精度高,可实现分布式测量,可实现远程实时检测的特点,但是光纤传感器测量待测物的变形幅度有限,且光纤材料价格昂贵,若应用于智轨列车道路路基沉降检测则需要沿线布设大量光纤传感器,不仅成本高且精密仪器和光学系统维护困难,而且按照工程经验,近海滩涂区高填方软土路基会产生较大的沉降变形,因此该方法在近海滩涂区智轨列车道路路基沉降检测实际应用中受到限制;卫星遥感测量法通过差分干涉测量地表形变,进而实现对道路路基各个方向位移的测量,其中最常用的是合成孔径雷达干涉测量法(insar),其利用卫星上的合成孔径雷达或干涉雷达获取道路沿线的雷达图像和高度数据,这些数据可以通过商业或科学卫星获取,如ers-1/2、jason-1、sentinel-1等,将获取的雷达图像和高度数据进行处理和分析,通过对比不同时间段的雷达图像,可以获得路基的形变信息,具有测量速度快、效率高的特点,近些年来在观测城区地表塌陷,矿山开发沉陷,高原冻土变形,火山活动位移领域应用广泛,测量精度也在不断提升,但卫星遥感测量对垂直方向位移(沉降)的敏感程度较弱,且其数据精度和稳定性易受卫星几何位置、大气扰动等多种因素的影响,因此,该方法对雾天天气出现较多的近海滩涂区的智轨列车道路路基沉降检测并不适宜。
3、由于近海滩涂区复杂的自然环境和土壤条件,高填方软土路基会产生较大的沉降,同时考虑实际交通荷载特点(含新兴的中运量公共交通工具——智轨列车,可无人驾驶,柔性编组,最高时速70km/h)及路线长度,因此,对近海滩涂区智轨列车道路路基沉降实现自动高效、动态准确的无损检测仍是一个挑战。由路基沉降检测技术的发展现状可知:传统土木工程检测方法具有成本低、操作简单、易于测量等优点,但存在着受主观因素影响大、作业效率低、有损检测等缺点;光纤传感器测量法测量精度高,可以实现远距离测量,但是光纤传感器造价昂贵,维护困难,检测变形的幅度较小;卫星遥感测量方法对垂直方向位移(沉降)敏感程度较弱,且其数据精度和稳定性易受卫星几何位置、大气扰动等多种因素的影响。
技术实现思路
1、为了解决以上技术问题,本发明提供了一种近海滩涂区智轨列车道路路基沉降机器视觉检测方法,所述方法包括:
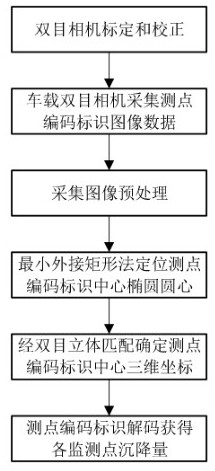
2、s1、对智轨列车道路的路基沉降监测点schneider编码标识进行图像采集与图像预处理;
3、s2、基于schneider编码标识获取预处理后图像的圆心点;
4、s3、使用双目立体匹配算法对所述圆心点进行三维坐标的计算;
5、s4、对所述schneider编码标识进行解码,基于解码内容以及圆心点三维坐标的计算结果,获得智轨列车道路路基在各监测点的沉降量。
6、可选的,所述s1中,所述图像采集的过程具体包括:
7、通过车载双目立体视觉采集系统对路基沉降监测点schneider编码标识图像进行采集,得到schneider编码标识中心圆形经过投影后在相机成像平面上所成的椭圆形图像。
8、可选的,所述s1中,图像预处理的过程具体包括:
9、输入采集的原图像;
10、对所述原图像进行基于加权平均法的灰度化处理,输出含有两个颜色通道的灰度化图像;
11、对所述灰度化图像进行高斯滤波,得到消除高斯噪声后的图像;
12、对所述消除高斯噪声后的图像进行二值化处理,得到二值化图像;
13、对所述二值化图像进行canny边缘检测,生成包含图像边缘信息的图像和包含边缘信息的矩阵;
14、将所述矩阵导入hough变换算法中对图像进行边缘遍历,找到图像的中心椭圆,得到标识中心椭圆的图像,完成图像预处理。
15、可选的,所述s2中,获取预处理后图像的圆心点的过程包括:
16、使用最小外接矩形法对所述标识中心椭圆的图像进行椭圆圆心的确定。
17、可选的,所述椭圆圆心的确定方法包括:
18、对于椭圆方程:
19、(其中,)
20、其中,为长轴长度,为短轴长度;
21、选择中心椭圆图像上任意一点作为坐标原点,过坐标原点作斜率为k的直线为基准线:;
22、在椭圆上做两条平行于的切线和,切点分别为和,切点坐标为:
23、;
24、在椭圆上做两条垂直于的切线和,切点分别为和,切点坐标为:
25、;
26、根据切点坐标得到切线方程:
27、
28、通过对切线方程形成的最小外接矩形的四个顶点坐标求平均值则可确定椭圆圆心。
29、可选的,所述s3中,使用双目立体匹配算法对所述圆心点进行三维坐标的计算过程包括:
30、使用双目立体匹配算法获取路基沉降监测点标识中心点在双目图像中对应像素点之间的视差;
31、基于所述视差与所述图像圆心点得到图像圆心点的深度信息;
32、基于所述视差以及所述深度信息,得到所述图像圆心点的实际三维坐标。
33、可选的,所述s4中,对所述schneider编码标识进行解码的具体过程包括:
34、创建一个和二值图像大小相同的全零数组作为掩膜;
35、在所述掩膜上绘制外圆和内圆,将外圆区域填充为白色,内圆区域填充为黑色;
36、使用位与运算将所述二值图像和所述掩膜进行合并,并将外圆和内圆之外的区域置为黑色;
37、设置图像正上方为起始角度和36°为角度步长,从起始角度开始,每隔一角度步长进行采样一个点,获取该点的灰度值,并将灰度值与设置的阈值进行比较,若大于阈值则输出为“1”,若小于阈值则输出为“0”,将图像信息转换为二进制码;
38、将所述二进制码转换为十进制数,输出十进制结果。
39、本发明还公开一种智轨列车道路路基沉降机器视觉检测系统,所述检测系统包括:图像采集与处理模块、中心点获取模块、实际坐标获取模块和沉降量获取模块;
40、所述图像采集与处理模块用于对智轨列车道路路基沉降监测点标识进行图像采集与图像预处理;
41、所述中心点获取模块用于使用schneider编码标识获取预处理后图像的圆心点;
42、所述实际坐标获取模块用于使用双目立体匹配算法对所述圆心点进行三维坐标的计算;
43、所述沉降量获取模块用于对所述schneider编码标识进行解码,基于解码内容以及圆心点三维坐标的变化,获得智轨列车道路路基在各监测点的沉降量。
44、可选的,所述沉降量获取模块包括掩膜子模块、填充子模块、合并子模块、对比子模块和输出子模块;
45、所述掩膜子模块用于创建一个和二值图像大小相同的全零数组作为掩膜;
46、所述填充子模块用于在所述掩膜上绘制外圆和内圆,将外圆区域填充为白色,内圆区域填充为黑色;
47、所述合并子模块用于使用位与运算将所述二值图像和所述掩膜进行合并,并将外圆和内圆之外的区域置为黑色;
48、所述对比子模块用于设置图像正上方为起始角度和36°为角度步长,从起始角度开始,每隔一角度步长进行采样一个点,获取该点的灰度值,并将灰度值与设置的阈值进行比较,若大于阈值则输出为“1”,若小于阈值则输出为“0”,将图像信息转换为二进制码;
49、所述输出子模块用于将所述二进制码转换为十进制数,输出十进制结果。
50、与现有技术相比,本发明的有益效果为:
51、本发明利用计算机视觉技术和图像处理技术,将双目立体视觉测量引入近海滩涂区智轨列车道路路基沉降检测中,通过车载双目相机采集路基沉降监测点schneider编码标识图像数据,并通过图像处理技术计算出沉降发生前后schneider编码标识中心三维坐标的变化,以此精确反映路基沉降值。克服了人工测量中主观因素对检测结果的影响,提高了作业效率,实现路基沉降量的无损准确检测,同时与现有其它无损测量方法相比具有更低的成本。由于能够进行高效长距离连续测量工作,及时监测沉降状态,可应用于大型道路工程项目中,对提高我国道路路基沉降检测的智能化水平具有重要的意义。
- 还没有人留言评论。精彩留言会获得点赞!