一种伺服焊枪电极检测装置、焊枪、机器人及方法与流程
本发明属于机器人焊枪的电极对中性检测领域,具体涉及一种伺服焊枪电极检测装置及方法。
背景技术:
1、目前在汽车生产线中,大量使用焊接机器人对汽车零部件进行焊接,其中,焊枪是焊接机器人的重要部件,在焊接过程中焊枪电极偏移后会造成整车焊点的偏移,导致整车焊点质量问题;而焊枪电极帽的偏移主要时因为焊枪电极杆松动及形变引起的,目前的检测装置结构比较简单,主要通过上下两个互相对中的圆筒来检测焊枪电极的对中性,让焊枪上下两个电极臂进入到圆筒中,从而达到检测对中性的目的,但是无法对偏移方向等进行具体检测和判断。
技术实现思路
1、针对现有技术存在的不足,本发明的目的是提供一种伺服焊枪电极检测装置、焊枪、机器人及方法,以克服在机器人焊接过程中由于电极偏移造成的车身质量问题,可以有效保证自动化较高的白车身生产过程中无法理解发现的焊枪电极偏移造成的车身质量问题。
2、为了实现上述目的,本发明是通过如下的技术方案来实现:
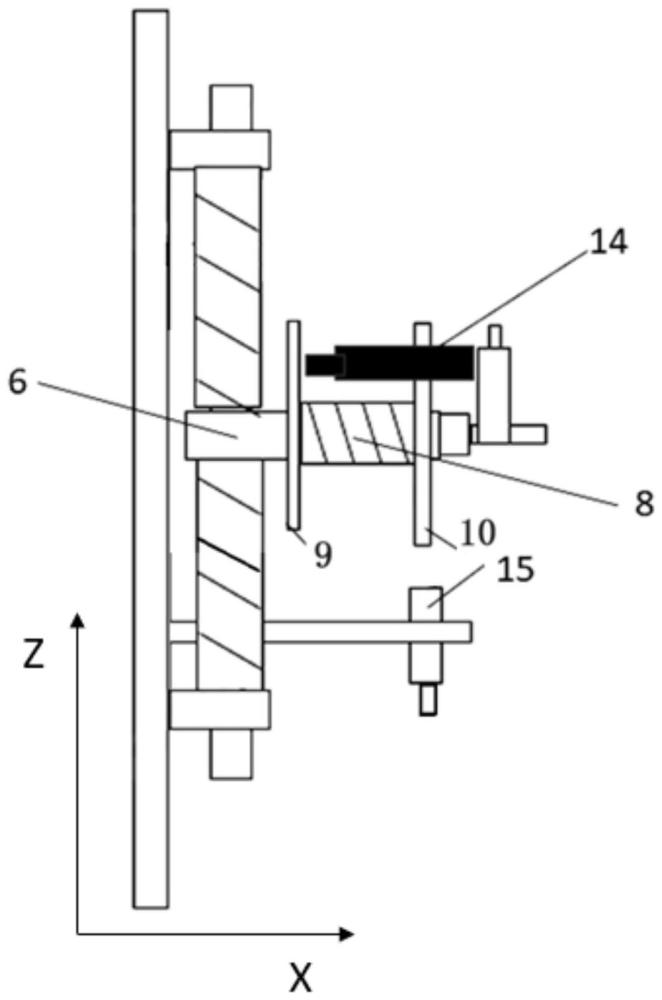
3、第一方面,本发明的实施例提供了一种伺服焊枪电极检测装置,包括安装板,在安装板上竖直的设置两个相互平行的第一导向杆,在每个第一导向杆上套装有第一弹簧和第二弹簧,在第一弹簧和第二弹簧之间设置一个套装在两个第一导向杆上的连接板,在所述的连接板上水平设置两个相互平行的第二导向杆,在两个第二导向杆上安装有固定板和活动板,且在固定板和活动板之间安装有第三弹簧,第三弹簧可以驱动活动板沿着第二导向杆来回活动,在所述的活动板上设置电极检测装置,在电极检测装置上设置第一传感器,在活动板上设置第二传感器;在活动板的下方设置固定不动的第三传感器,用于检测活动板是否移动。
4、本发明构成结构简单、便于安装调试,可有效检测焊枪电极头在xyz方向上的偏移情况;通过电极检测装置的检测孔配合第二、第三传感器可以检测xy方向上的偏移情况,通过第一传感器、第三传感器可以检测z方向上的偏移情况。
5、作为进一步的技术方案,在安装板上还设置一个传感器支架,在所述的传感器支架上安装有第三传感器。
6、作为进一步的技术方案,所述的第一弹簧和第二弹簧的性能相同。
7、作为进一步的技术方案,所述的电极检测装置上设置一个检测通孔,检测通孔的最小直径略大于电极帽的最大直径,且电极检测装置的侧面开设有与检测通孔连通的导向孔。
8、作为进一步的技术方案,所述的第一传感器、第二传感器与焊接机器人的报警系统进行信号传输。
9、作为进一步的技术方案,在两个第二导向杆均套装有第三弹簧,两个第三弹簧性能相同。
10、第二方面,本发明还提供了一种焊枪,其配套安装有所述的伺服焊枪电极检测装置。
11、第三方面,本发明还提供了一种焊接机器人,其配套安装有所述的伺服焊枪电极检测装置。
12、第四方面,基于上述伺服焊枪电极检测装置,还提供了一种检测方法,具体如下:
13、当需要对焊枪电极进行xy方向是否偏移检测时,自动将焊枪电极从电极检测装置的侧面插入至检测孔内,当焊枪电极在xy方向上无任何偏移时,此时第二传感器可以检测到焊枪电极到位,则发出信号,表示焊枪电极在xy方向均无偏移;若无法插入至检测孔内,焊枪电极会推动活动板向固定板所在侧移动,则此时第二传感器无法检测到信号,同时,第三传感器信号也无法检测到信号,表示电极在y方向有偏移;若焊枪电极可以插入至检测孔内,且第二传感器可以检测到信号且第三传感器无法检测到信号,说明电极在负x方向有偏移;若第二传感器无法检测到信号且第三传感器信号有信号,说明电极在正x方向有偏移;
14、当需要对焊枪电极进行z方向是否偏移检测时,将焊枪电极从电极检测装置的下方插入,若第一传感器未检测到信号,说明电极在负z方向有偏移,若第一传感器未检测到信号,且第三传感器信号发生改变,则说明电极在正z方向有偏移;若第一传感器检测到信号且第三传感器信号不变,则说明电极在z方向无偏移。
15、上述本发明的实施例的有益效果如下:
16、本装置在x、y两个方向通过第二传感器和第三传感器的配合实现对电极在x、y两个方向的偏移检测、在z方向通过第一传感器和第三传感器的配合,实现电极在z方向的偏移检测,该装置能够有效的控制设备成本,减少设备资金的投入,并有效的控制了车身质量问题的外流。
17、本装置此装置安装简单,并可自动检测机器人焊枪电极杆的电极头偏移情况,并可以快速安装拆卸,对工厂成本控制有一定帮助,利用较小的投入可已解决焊接现场较大的质量返修问题;
技术特征:
1.一种伺服焊枪电极检测装置,其特征在于,包括安装板,在安装板上竖直的设置两个相互平行的第一导向杆,在每个第一导向杆上套装有第一弹簧和第二弹簧,在第一弹簧和第二弹簧之间设置一个套装在两个第一导向杆上的连接板,在所述的连接板上水平设置两个相互平行的第二导向杆,在两个第二导向杆上安装有固定板和活动板,且在固定板和活动板之间安装有第三弹簧,第三弹簧可以驱动活动板沿着第二导向杆来回活动,在所述的活动板上设置电极检测装置,在电极检测装置上设置第一传感器,在活动板上设置第二传感器;在活动板的下方设置固定不动的第三传感器,用于检测活动板是否移动。
2.如权利要求1所述的伺服焊枪电极检测装置,其特征在于,在安装板上还设置一个传感器支架,在所述的传感器支架上安装所述的第三传感器。
3.如权利要求1所述的伺服焊枪电极检测装置,其特征在于,所述的第一弹簧和第二弹簧的性能相同。
4.如权利要求1所述的伺服焊枪电极检测装置,其特征在于,所述的电极检测装置上设置一个检测通孔,检测通孔的最小直径略大于电极帽的最大直径,且电极检测装置的侧面开设有与检测通孔连通的导向孔。
5.如权利要求1所述的伺服焊枪电极检测装置,其特征在于,所述的第一传感器、第二传感器、第三传感器与焊接机器人的报警系统进行信号传输。
6.如权利要求1所述的伺服焊枪电极检测装置,其特征在于,所述的连接板通过石墨导套与第一导向杆相连。
7.如权利要求1所述的伺服焊枪电极检测装置,其特征在于,在两个第二导向杆均套装有第三弹簧,两个第三弹簧性能相同。
8.一种焊枪,其特征在于,其配套安装有权利要求1-7任一所述的伺服焊枪电极检测装置。
9.一种焊接机器人,其特征在于,其配套安装有权利要求1-7任一所述的伺服焊枪电极检测装置。
10.基于权利要求1-7任一所述的伺服焊枪电极检测装置的检测方法,其特征在于:
技术总结
本发明公开了一种伺服焊枪电极检测装置、焊枪、机器人及方法,包括安装板,在安装板上竖直的设置两个相互平行的第一导向杆,在每个第一导向杆上套装有第一弹簧和第二弹簧,在第一弹簧和第二弹簧之间设置一个套装在两个第一导向杆上的连接板,在所述的连接板上水平设置两个相互平行的第二导向杆,在两个第二导向杆上安装有固定板和活动板,且在固定板和活动板之间安装有第三弹簧,第三弹簧可以驱动活动板沿着第二导向杆来回活动,在所述的活动板上设置电极检测装置,在电极检测装置上设置第一传感器,在活动板上设置第二传感器;在活动板的下方设置固定不动的第三传感器,用于检测活动板是否移动。
技术研发人员:姚宏,赵泽宇,孙沙沙,时梦如,张文宇,朱咸勇,王昌政,李鑫,王加强,鲁德明,雷亚军
受保护的技术使用者:奇瑞新能源汽车股份有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!