一种用于极地海底打捞机器人密封性能检测装置
本发明涉及海洋工程,特别是一种用于极地海底打捞机器人密封性能检测装置。
背景技术:
1、由于自然环境极为严酷,极地生物种类十分稀少,是世界上生物资源最少的地域,尤其是在内陆地区,几乎不存在自然生命。但是海洋里生物资源却极其丰富,有大量的海藻、珊瑚、海星、海绵,磷虾等生物,同时,极地的海域蕴藏许多的矿产资源,因此,极地的海洋时科考人员的关注重点,在需要对极地海底进行考察时,科考人员借助海底打捞机器人进行海底取样等操作;
2、极地地区的水温较低,海底环境也相对恶劣,因此海底打捞机器人在使用前需要进行密封性能检测,在极地环境下,机器人的密封性能很容易受到影响,如果不进行密封性能检测,可能会导致机器人在水下运行时出现漏水或其他故障,从而影响科考工作的进展,密封性能的检测主要是为了防止海水渗入机器人内部,造成设备损坏或功能失效,但是现有的海底打捞机器人密封性能检测装置不便于模拟极冰环境下不同的水流速度和水流方向,极冰环境下的水流条件复杂多变,包括快速流动的洋流、冰山碰撞引起的湍流等,这些因素对海底机器人的密封性能产生影响,如果密封性能检测装置无法模拟这些变化,就可能会导致机器人在实际运行中出现漏水或其他问题。
技术实现思路
1、本发明所要解决的技术问题是:现有的海底打捞机器人密封性能检测装置不便于模拟极冰环境下不同的水流速度和水流方向,极冰环境下的水流条件复杂多变,包括快速流动的洋流、冰山碰撞引起的湍流等,这些因素对海底机器人的密封性能产生影响,如果密封性能检测装置无法模拟这些变化,就可能会导致机器人在实际运行中出现漏水或其他问题。
2、为解决上述技术问题,本发明提供如下技术方案:
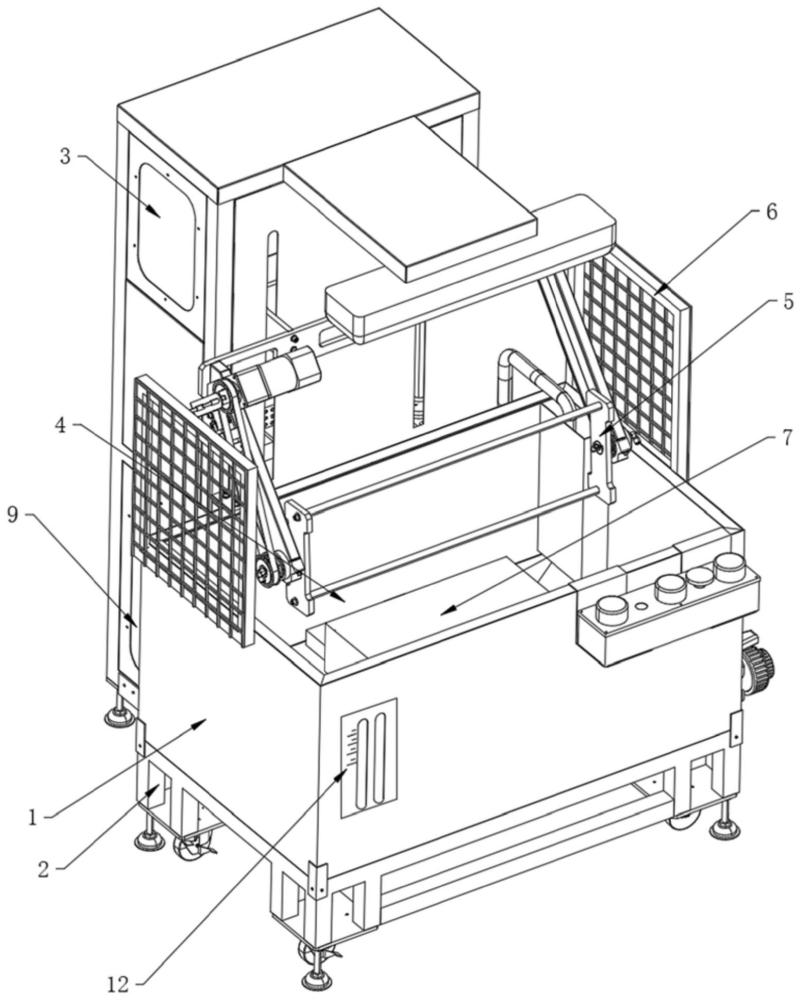
3、一种用于极地海底打捞机器人密封性能检测装置,包括检测箱体、调节机构、扰流机构和水处理机构,所述检测箱体内开设有水槽,水槽内放置有打捞机器人本体,且检测箱体一侧设置有水处理机构,且水处理机构上设置有调节机构,调节机构一侧设置有扰流机构,扰流机构与水槽之间相互配合,对水槽中的水进行调节。
4、进一步地,水处理机构包括连通阀、排水管、输送管、水泵、制冷器、出水管和处理箱,所述检测箱体下方设置有排水管,排水管一侧设置有连通阀,排水管靠近连通阀的一侧设置有输送管,所述处理箱内一侧设置有水泵,输送管一侧固定连接有水泵,且处理箱靠近水泵的一侧设置有制冷器,水泵远离输送管的一侧固定连接有制冷器,制冷器一侧设置有出水管,出水管位于水槽内部,所述连通阀连接外部供水设备。
5、进一步地,调节机构包括安装架、滑动槽、螺纹杆、调节块、安装板、导向杆、导向架、第一主动轮、第一传动轮、第一传动带和第一驱动电机,所述处理箱上侧设置有安装架,安装架靠近处理箱的一侧设置有安装板,安装板中部于安装架内设置有螺纹杆,且安装板两侧于安装架内设置有导向杆,螺纹杆上螺纹连接有调节块,调节块上设置有导向架,导向架两侧位于导向杆上。
6、进一步地,所述处理箱内一侧设置有第一驱动电机,第一驱动电机的输出端固定连接有第一主动轮,且螺纹杆贯穿安装板的一侧固定连接有第一传动轮,第一传动轮与第一主动轮之间设置有第一传动带,所述安装架表面开设有滑动槽,且导向架一侧对称设置有凸块,凸块位于滑动槽内。
7、进一步地,扰流机构包括扰流架、第二驱动电机、第二主动轮、第二传动带、第二传动轮和扰流板,所述导向架通过凸块固定连接有扰流架,扰流架呈u型结构,且扰流架外侧活动连接有扰流板,扰流板一侧贯穿扰流架设置有第二传动轮。
8、进一步地,所述扰流架远离扰流板的一侧设置有第二驱动电机,第二驱动电机的输出端固定连接有第二主动轮,第二主动轮与第二传动轮之间设置有第二传动带。
9、进一步地,所述第一驱动电机和第二驱动电机均与控制柜之间电性连接。
10、进一步地,所述检测箱体一侧表面嵌入设置有检测组件,检测组件是由水位检测和水温检测组合而成,且检测箱体于水槽槽口两侧对称设置有防溅板。
11、进一步地,所述检测箱体下方四角设置有支撑腿,支撑腿下方均设置有万向轮,且万向轮一侧设置有立柱。
12、进一步地,所述检测箱体一侧设置有控制面板,所述调节机构一侧设置有控制柜,控制柜与控制面板之间电性连接。
13、本发明的有益效果:
14、1.检测箱体是一个容器,内部开设有水槽,用于放置打捞机器人本体进行测试和实验,检测箱体下方的四角设置有支撑腿,并且每个支撑腿下方都装有万向轮,这样的设计可以方便移动和调整检测箱体的位置,检测箱体一侧设置有水处理机构,用于处理水槽中的水质,水处理机构上设置有调节机构,调节机构一侧设置有扰流机构,这些组件相互配合,可以对水槽中的水流进行调节和扰动,以模拟不同的水流条件,检测箱体一侧设置有控制面板,用于操作和监控检测过程,调节机构一侧设置有控制柜,控制柜与控制面板通过电性连接,实现控制信号的传输和控制指令的执行,检测箱体一侧表面嵌入设置有检测组件,主要包括水位检测和水温检测,这些检测组件用于实时监测水槽中的水位和水温,并将数据反馈给控制面板进行分析和记录,检测箱体于水槽槽口两侧对称设置有防溅板,用于防止水槽中的水溅出。
15、2.该装置连通阀连接外部供水设备,通过控制连通阀的开关状态,可以控制外部供水的通断,检测箱体下方设置有排水管,排水管一侧设置有连通阀,当需要排水时,打开连通阀,水可以通过排水管从检测箱体中排出,也可将水通过排水管输送至输送管内部,排水管靠近连通阀的一侧设置有输送管,处理箱内一侧设置有水泵,水泵的作用是通过旋转叶片产生负压,将水吸入并推送到制冷器,制冷器的作用是通过冷却介质的循环流动,吸收热量并降低水的温度,制冷器一侧设置有出水管,出水管位于水槽内部,经过制冷器的冷却处理后,水通过出水管进入水槽中,通过循环制冷模拟极冰环境,该装置可以有效地降低水的温度,使得水在水槽中保持较低的温度,这样可以模拟极冰环境下的低温条件,为相关设备或实验提供适宜的环境,此外,该水装置还可以节约水资源,通过循环利用水,并进行冷却处理,可以减少对大量新鲜水的需求,从而达到节约水资源的目的,这对于环境保护和可持续发展非常重要。
16、3.第一驱动电机通过输出端的旋转驱动第一主动轮旋转,第一主动轮与第一传动轮通过第一传动带连接,使得第一传动轮也开始旋转,螺纹杆贯穿安装板的一侧,并通过螺纹连接的方式固定在调节块上,当第一传动轮旋转时,螺纹杆也会随之旋转,由于调节块与螺纹杆连接,螺纹杆的旋转会导致调节块在螺纹杆上的移动,调节块上设置有导向架,导向架两侧位于导向杆上,导向杆通过安装板固定在安装架上,安装架表面开设有滑动槽,导向架一侧对称设置有凸块,凸块位于滑动槽内,这样设计可以使得调节块在滑动槽内沿着竖直方向进行滑动,进而影响整个调节机构的工作状态和位置,进而通过调节能够调节扰流机构的位置。
17、4.第二驱动电机通过输出端的旋转驱动第二主动轮旋转,第二主动轮通过第二传动带与第二传动轮相连,使得第二传动轮也开始旋转,扰流架通过导向架与调节机构相连接,并且通过凸块固定在导向架上,扰流板一侧贯穿扰流架,并与第二传动轮相连,当第二传动轮旋转时,扰流板也会随之旋转,当第二驱动电机启动时,通过旋转驱动第二主动轮,经过传动带和第二传动轮的传动,扰流板开始旋转,扰流板的旋转角度和方向受第二驱动电机的控制,通过调节第二驱动电机的旋转速度和方向,可以调节扰流板的扰流方向和转速,通过调整第二驱动电机的旋转速度,可以控制扰流板的转速,较高的转速可以模拟较快的水流速度,而较低的转速则可以模拟较慢的水流速度,通过逐步调整旋转速度,可以模拟不同水流速度下的性能表现,同时,通过调整第二驱动电机的旋转方向,可以改变扰流板的扰流方向,通过控制旋转方向,可以模拟不同水流方向对船舶或水上设备的影响,在极冰环境中,水流方向可能会随着冰块的漂移而改变,通过调节扰流板的扰流方向,可以模拟这种情况下的性能响应,从而模拟极冰环境下不同的水流速度和水流方向,这有助于对打捞机器人在极冰环境中的性能进行评估和优化设计。
- 还没有人留言评论。精彩留言会获得点赞!