飞行器方向舵舵面偏转角度测量方法及装置与流程
本发明属于飞控系统,更具体地,涉及一种飞行器方向舵舵面偏转角度测量方法及装置。
背景技术:
1、舵面指的是飞机的操纵面,主要的舵面指的是升降舵,方向舵,副翼舵,除此之外还有缝翼,扰流板等,随着飞机的不断更新迭代发展舵面安装位置、大小、种类,功能都在发生着变化。其中方向舵控制着飞机航向,对飞机的运行轨迹与姿态的控制起着重要作用。其中方向舵的标定就显得十分重要,而精准,高效,简易的方向舵面的角度测量就是标定的重要一步。现阶段的多种传统角度测量方法比较原始,其中一种使用倾角传感器夹具测试容易损伤舵面,且通常不适用于方向舵舵面角度的测量。另一种使用直尺等测量舵面后缘位移变化量,需要大量人工操作,流程复杂,大量的计算过程中出现误差无法排除,在大型舵面的测量时人工安全得不到保障。
2、公开于本发明背景技术部分的信息仅仅旨在加深对本发明的一般背景技术的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域技术人员所公知的现有技术。
技术实现思路
1、本发明的目的是提出一种飞行器方向舵舵面偏转角度测量方法及装置,实现快速准确地测量飞行器方向舵舵面偏转角度,提高了测量效率和准确度,简化了测量流程,同时降低了人工成本。
2、为实现上述目的,本发明提出了一种飞行器方向舵舵面偏转角度测量方法及装置。
3、根据本发明的第一方面,提出了一种飞行器方向舵舵面偏转角度测量方法,包括:
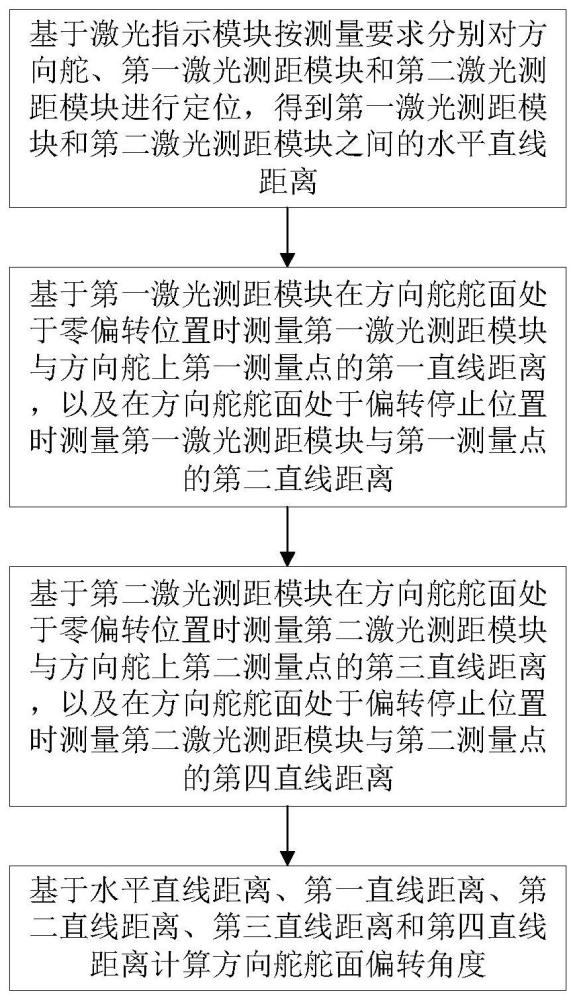
4、基于激光指示模块按测量要求分别对方向舵、第一激光测距模块和第二激光测距模块进行定位,得到所述第一激光测距模块和所述第二激光测距模块之间的水平直线距离;
5、基于所述第一激光测距模块在所述方向舵舵面处于零偏转位置时测量所述第一激光测距模块与所述方向舵上第一测量点的第一直线距离,以及在所述方向舵舵面处于偏转停止位置时测量所述第一激光测距模块与所述第一测量点的第二直线距离;
6、基于所述第二激光测距模块在所述方向舵舵面处于零偏转位置时测量所述第二激光测距模块与所述方向舵上第二测量点的第三直线距离,以及在所述方向舵舵面处于偏转停止位置时测量所述第二激光测距模块与所述第二测量点的第四直线距离;
7、基于所述水平直线距离、所述第一直线距离、所述第二直线距离、所述第三直线距离和所述第四直线距离计算所述方向舵舵面偏转角度。
8、可选地,所述测量要求包括:
9、所述方向舵舵面处于所述零偏转位置,所述方向舵旋转轴的轴线与水平面垂直,所述方向舵舵面的侧边缘线与水平面垂直,所述第一激光测距模块和所述第二激光测距模块水平,所述第一激光测距模块和所述第二激光测距模块均置于所述方向舵舵面的一侧并间隔所述水平直线距离,所述第一激光测距模块位于所述方向舵旋转轴方向,所述第二激光测距模块位于所述方向舵舵面的侧边缘线方向,所述第一激光测距模块和所述第二激光测距模块到所述方向舵舵面的直线距离范围满足所述第一激光测距模块和所述第二激光测距模块的测量范围。
10、可选地,所述计算所述方向舵舵面偏转角度包括:
11、基于所述第一直线距离、所述第三直线距离和所述水平直线距离计算在所述方向舵舵面处于零偏转位置时所述方向舵舵面与所述测量基准线的第一夹角;
12、基于所述第二直线距离、所述第四直线距离和所述水平直线距离计算在所述方向舵舵面处于偏转终止位置时所述方向舵舵面与所述测量基准线的第二夹角;
13、基于所述第一夹角和所述第二夹角计算所述方向舵舵面的偏转角度。
14、可选地,计算所述第一夹角的表达式为:
15、
16、其中,θ21为第一夹角,s1为第一直线距离,s2为第三直线距离,l为水平直线距离。
17、可选地,计算所述第二夹角的表达式为:
18、
19、其中,θ2′1为第二夹角,s1′为第二直线距离,s2′为第四直线距离,l为水平直线距离。
20、可选地,
21、计算所述偏转角度的表达式为:
22、θ=θ2′1-θ21;
23、其中,θ为偏转角度。
24、可选地,当所述第二直线距离小于所述第一直线距离时,所述偏转角度大于0°,当所述第二直线距离大于所述第一直线距离时,所述偏转角度小于0°。
25、可选地,所述第一激光测距模块和所述第二激光测距模块的量程均为400±200mm。
26、可选地,所述激光指示模块固定于支架上,所述第一激光测距模块和所述第二激光测距模块分别固定于旋转云台上。
27、根据本发明的第二方面,提出了一种飞行器方向舵舵面偏转角度测量装置,包括:
28、激光指示模块,用于按测量要求分别对方向舵、第一激光测距模块和第二激光测距模块进行定位,得到所述第一激光测距模块和所述第二激光测距模块之间的水平直线距离;
29、第一激光测距模块,用于在所述方向舵舵面处于零偏转位置时测量所述第一激光测距模块与所述方向舵上第一测量点的第一直线距离,以及在所述方向舵舵面处于偏转停止位置时测量所述第一激光测距模块与所述第一测量点的第二直线距离;
30、第二激光测距模块,用于在所述方向舵舵面处于零偏转位置时测量所述第二激光测距模块与所述方向舵上第二测量点的第三直线距离,以及在所述方向舵舵面处于偏转停止位置时测量所述第二激光测距模块与所述第二测量点的第四直线距离;
31、计算模块,用于基于所述水平直线距离、所述第一直线距离、所述第二直线距离、所述第三直线距离和所述第四直线距离计算所述方向舵舵面偏转角度。
32、本发明的有益效果在于:本发明通过激光指示模块对方向舵、第一激光测距模块和第二激光测距模块进行定位,使方向舵、第一激光测距模块和第二激光测距模块的放置位置及形态满足测量要求,通过第一激光测距模块和第二激光测距模块测量到方向舵舵面第一测量点和第二测量点的直线距离,进而根据直线距离计算出方向舵舵面的偏转角度,实现快速准确地测量飞行器方向舵舵面偏转角度,提高了测量效率和准确度,简化了测量流程,同时降低了人工成本,同时保障了人员安全;同时通过旋转云台固定激光测距模块,避免激光测距模块在旋转过程倾斜导致出现测量误差,提高了测量的精确度。
33、本发明的系统具有其它的特性和优点,这些特性和优点从并入本文中的附图和随后的具体实施方式中将是显而易见的,或者将在并入本文中的附图和随后的具体实施方式中进行详细陈述,这些附图和具体实施方式共同用于解释本发明的特定原理。
技术特征:
1.一种飞行器方向舵舵面偏转角度测量方法,其特征在于,包括:
2.根据权利要求1所述的飞行器方向舵舵面偏转角度测量方法,其特征在于,所述测量要求包括:
3.根据权利要求2所述的飞行器方向舵舵面偏转角度测量方法,其特征在于,所述计算所述方向舵舵面偏转角度包括:
4.根据权利要求3所述的飞行器方向舵舵面偏转角度测量方法,其特征在于,计算所述第一夹角的表达式为:
5.根据权利要求4所述的飞行器方向舵舵面偏转角度测量方法,其特征在于,计算所述第二夹角的表达式为:
6.根据权利要求5所述的飞行器方向舵舵面偏转角度测量方法,其特征在于,
7.根据权利要求1所述的飞行器方向舵舵面偏转角度测量方法,其特征在于,当所述第二直线距离小于所述第一直线距离时,所述偏转角度大于0°,当所述第二直线距离大于所述第一直线距离时,所述偏转角度小于0°。
8.根据权利要求1所述的飞行器方向舵舵面偏转角度测量方法,其特征在于,所述第一激光测距模块和所述第二激光测距模块的量程均为400±200mm。
9.根据权利要求1所述的飞行器方向舵舵面偏转角度测量方法,其特征在于,所述激光指示模块固定于支架上,所述第一激光测距模块和所述第二激光测距模块分别固定于旋转云台上。
10.一种飞行器方向舵舵面偏转角度测量装置,其特征在于,包括:
技术总结
本发明公开了一种飞行器方向舵舵面偏转角度测量方法及装置。该方法包括:基于激光指示模块按测量要求分别对方向舵和两个激光测距模块进行定位,得到两个激光测距模块之间的水平直线距离;在零偏转位置时测量第一激光测距模块与方向舵上第一测量点的第一直线距离和在偏转停止位置时的第二直线距离;在零偏转位置时测量第二激光测距模块与方向舵上第二测量点的第三直线距离和在偏转停止位置时的第四直线距离;基于水平直线距离、第一直线距离、第二直线距离、第三直线距离和第四直线距离计算方向舵舵面偏转角度。本发明通过激光测距模块测量的距离并结合三角函数计算得到偏转角度,提高了测量效率和准确度,简化了测量流程,同时降低了人工成本。
技术研发人员:李嘉豪,邹宇翔,王晓东,宋璟,周圣禄
受保护的技术使用者:中国航天空气动力技术研究院
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!