一种基于毫米波雷达的人体跌倒实时监测方法与流程
本发明属于毫米波雷达,特别是涉及一种基于毫米波雷达的人体跌倒实时监测方法。
背景技术:
1、如何及时发现老人跌倒以及避免可能发生的伤害已成为社会的重点关注,毫米波跌倒检测雷达产品也变得备受青睐,毫米波跌倒检测雷达,它能够准确获取人员的位置、姿态等目标信息,通过准确的点云数据提供非接触人员姿态检测,无需佩戴任何设备实现目标的跌倒报警,但是,狭小复杂的卫生间场景会出现较高误报率导致雷达的用户体验下降,比如便器冲水,洗澡和拖地等行为产生的杂波干扰都会使得雷达出现一定概率误触发报警,针对这种雷达误报问题,本发明提出一种基于正负向频偏比的跌倒检测雷达误报抑制方法,它可以有效的降低卫生间场景的误报概率。
技术实现思路
1、本发明的目的在于提供一种基于毫米波雷达的人体跌倒实时监测方法,通过算法逻辑结构严谨、运算速度快、实时性好、抗噪能力强、易于实现,解决了现有的问题。
2、为解决上述技术问题,本发明是通过以下技术方案实现的:
3、本发明为一种基于毫米波雷达的人体跌倒实时监测方法,包括以下步骤:
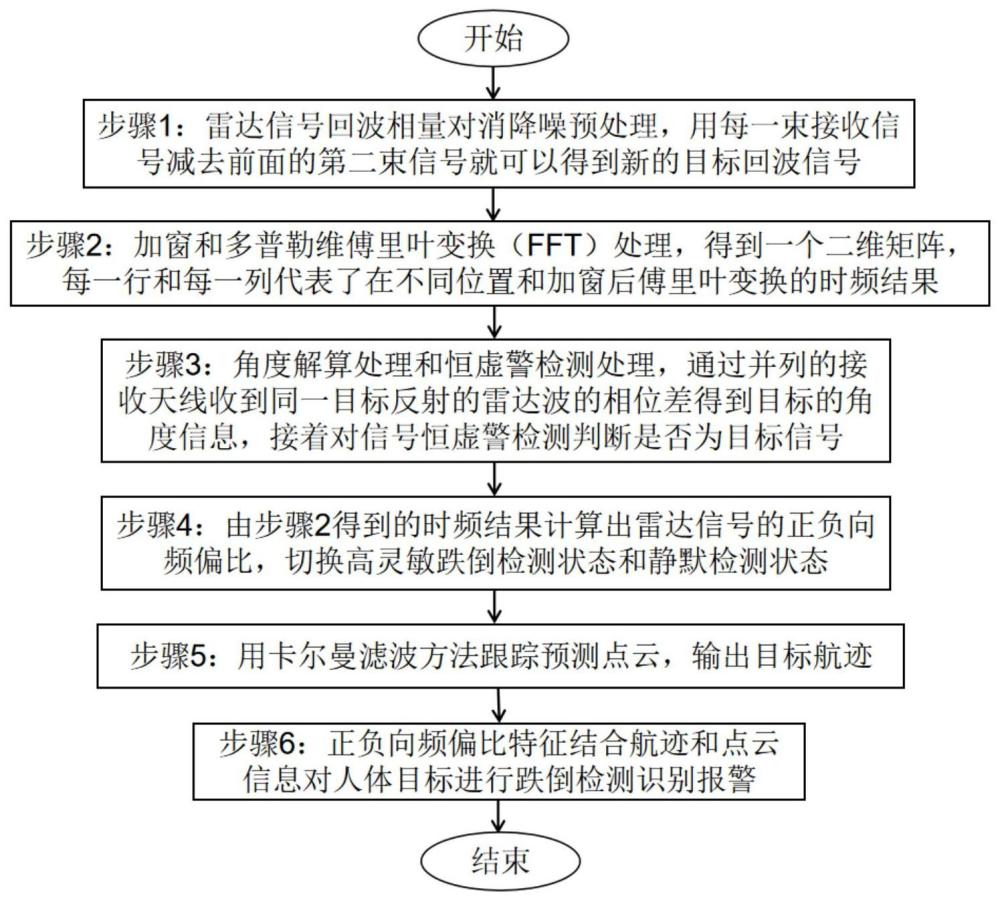
4、s1:雷达信号回波相量对消降噪预处理,用每一束接收信号减去前面的第二束信号就可以得到新的目标回波信号;
5、s2:加窗和多普勒维fft处理,得到一个二维矩阵,每一行和每一列代表了在不同位置和加窗后傅里叶变换的时频结果;
6、s3:角度解算处理和恒虚警检测处理,通过并列的接收天线收到同一目标反射的雷达波的相位差得到目标的角度信息,接着对信号恒虚警检测判断是否为目标信号;
7、s4:由s2得到的时频结果计算出雷达信号的正负向频偏比,切换高灵敏跌倒检测状态和静默检测状态;
8、s5:用卡尔曼滤波方法跟踪预测点云,输出目标航迹;
9、s6:正负向频偏比特征结合航迹和点云信息对人体目标进行跌倒检测识别报警。
10、所述s1的进一步表示为:静止目标到雷达天线的距离是不变的,雷达天线每一束接收信号上静止目标的时延也是不变的,然后用每一束接收信号减去前面的第二束信号就可以得到目标回波信号,回波相量对消处理算法的公式为:x(m,t)=x(m,t)-x(m,t-2)其中,m为快时间维(距离维)采样点,t为慢时间维(速度维)时间采样点,如果目标为静止目标,则每个调频回波信号的相位相同,则每个接收信号减完减去前面的第二束接收信号之后信号幅度变得非常小,假设目标是运动目标或者微动目标,由于目标运动会导致每个调频信号间的相位不同,对消之后运动或微动的目标特征就会在速度维傅里叶变换后变得更加明显。
11、所述s2的进一步表示为:首先将窗口移动到信号的开端位置,此时窗函数的中心位置在t=τ0处,对信号加窗处理y(m,t)=x(m,t)*w(m,t-τ)然后进行傅里叶变换,得到第一个分段序列的频谱,在窗函数中心为τ时,对原函数进行变换后的频谱结果s(w,τ),即:完成了对在τ0第一个分段的fft操作后,移动窗函数到τ1,移动距离一般小于窗口的宽度,从而保证前后两个窗口之间存在一定重叠部分,重复以上操作,不断滑动窗口、fft,最终得到从τ0~τm上所有分段的频谱,接着可以得到一个二维矩阵s(w,τ),每一行和每一列代表了在不同位置和加窗后傅里叶变换的时频结果,也就是雷达信号的时频图。
12、所述s3的进一步表示为:先进行角度解算处理,通过并列的接收天线收到同一目标反射的雷达波的相位差得到目标的角度信息,接着对信号恒虚警检测,在雷达信号检测中,对输入的噪声进行处理后确定一个门限,将此门限与输入端信号相比,如输入端信号超过了此门限,则判为有目标。
13、所述s4的进一步表示为:在每帧中将频谱数据分成正负轴两部分,在正半轴找到能量大于阈值且频偏最大的点,这个点对应的频偏为最大正向频偏frep;同理,在负半轴找到能量大于阈值且频偏最大的点,这个点对应的频偏为最大负向频偏fren,正负向频偏比由输出最大正向频偏和负向频偏之比与最大负向频偏和正向频偏之比分别加权后的平方和开根号得到,公式表示为:frep:输出最大正向频偏,fren:输出最大负向频偏,fred:正负向频偏比,α:正向频偏比加权系数,β:负向频偏比加权系数。
14、本发明具有以下有益效果:
15、1、本发明算法逻辑结构严谨、运算速度快、实时性好、抗噪能力强、易于实现。
16、2、本发明进行了回波相量对消处理,用每一束接收信号减去前面的第二束信号就可以得到目标回波信号,信号对消之后运动或微动的目标特征就会在速度维傅里叶变换后变得更加明显。
17、3、本发明发现时频结果中正负向频偏比跌倒特征,利用正负向频偏比切换高灵敏跌倒检测状态和静默检测状态,可以有效的过滤掉低矮目标的干扰,比如马桶冲水,宠物,拖地等造成的杂波点云会被消除。
18、当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
技术特征:
1.一种基于毫米波雷达的人体跌倒实时监测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于毫米波雷达的人体跌倒实时监测方法,其特征在于,所述s1的进一步表示为:静止目标到雷达天线的距离是不变的,雷达天线每一束接收信号上静止目标的时延也是不变的,然后用每一束接收信号减去前面的第二束信号就可以得到目标回波信号,回波相量对消处理算法的公式为:x(m,t)=x(m,t)-x(m,t-2)其中,m为快时间维采样点,t为慢时间维时间采样点,如果目标为静止目标,则每个调频回波信号的相位相同,则每个接收信号减完减去前面的第二束接收信号之后信号幅度变得非常小,假设目标是运动目标或者微动目标,由于目标运动会导致每个调频信号间的相位不同,对消之后运动或微动的目标特征就会在速度维傅里叶变换后变得更加明显。
3.根据权利要求2所述的一种基于毫米波雷达的人体跌倒实时监测方法,其特征在于,所述s2的进一步表示为:首先将窗口移动到信号的开端位置,此时窗函数的中心位置在t=τ0处,对信号加窗处理y(m,t)=x(m,t)*w(m,t-τ)然后进行傅里叶变换,得到第一个分段序列的频谱,在窗函数中心为τ时,对原函数进行变换后的频谱结果s(w,τ),即:完成了对在τ0第一个分段的fft操作后,移动窗函数到τ1,移动距离一般小于窗口的宽度,从而保证前后两个窗口之间存在一定重叠部分,重复以上操作,不断滑动窗口、fft,最终得到从τ0~τm上所有分段的频谱,接着可以得到一个二维矩阵s(w,τ),每一行和每一列代表了在不同位置和加窗后傅里叶变换的时频结果,也就是雷达信号的时频图。
4.根据权利要求3所述的一种基于毫米波雷达的人体跌倒实时监测方法,其特征在于,所述s3的进一步表示为:先进行角度解算处理,通过并列的接收天线收到同一目标反射的雷达波的相位差得到目标的角度信息,接着对信号恒虚警检测,在雷达信号检测中,对输入的噪声进行处理后确定一个门限,将此门限与输入端信号相比,如输入端信号超过了此门限,则判为有目标。
5.根据权利要求4所述的一种基于毫米波雷达的人体跌倒实时监测方法,其特征在于,所述s4的进一步表示为:在每帧中将频谱数据分成正负轴两部分,在正半轴找到能量大于阈值且频偏最大的点,这个点对应的频偏为最大正向频偏frep;同理,在负半轴找到能量大于阈值且频偏最大的点,这个点对应的频偏为最大负向频偏fren,正负向频偏比由输出最大正向频偏和负向频偏之比与最大负向频偏和正向频偏之比分别加权后的平方和开根号得到,公式表示为:frep:输出最大正向频偏,fren:输出最大负向频偏,fred:正负向频偏比,α:正向频偏比加权系数,β:负向频偏比加权系数。
技术总结
本发明公开了一种基于毫米波雷达的人体跌倒实时监测方法,涉及毫米波雷达技术领域。本发明包括以下步骤:S1:雷达信号回波相量对消降噪预处理,用每一束接收信号减去前面的第二束信号就可以得到新的目标回波信号;S2:加窗和多普勒维FFT处理,得到一个二维矩阵,每一行和每一列代表了在不同位置和加窗后傅里叶变换的时频结果;S3:角度解算处理和恒虚警检测处理,通过并列的接收天线收到同一目标反射的雷达波的相位差得到目标的角度信息,接着对信号恒虚警检测判断是否为目标信号。本发明通过算法逻辑结构严谨、运算速度快、实时性好、抗噪能力强、易于实现。
技术研发人员:杨博
受保护的技术使用者:长沙莫之比智能科技有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!