电子多圈绝对值编码器控制方法及电子多圈绝对值编码器与流程
本发明涉及编码器,具体而言,涉及一种电子多圈绝对值编码器控制方法及电子多圈绝对值编码器。
背景技术:
1、绝对值编码器是一种测量电机轴位置或电机轴旋转速度的装置,可以记录电机转子的绝对位置,在电机驱动与控制领域被广泛应用。绝对值编码器主要包括:机械多圈绝对值编码器和电子多圈绝对值编码器。
2、传统的机械式圈记忆编码器采用机械齿轮结构,通过齿轮传动原理实现多圈计数。电子多圈绝对值编码器一般采用单片机记录电机的多圈绝对位置。
3、但是,传统的机械多圈绝对值编码器的结构复杂,体积庞大,且计量圈数受限,不利于电机的集成化和小型化;传统的电子多圈绝对值编码器因器件多无法实现低成本小型化和系统快速响应的需求。
技术实现思路
1、本发明的目的在于,针对上述现有技术中的不足,提供一种电子多圈绝对值编码器控制方法及电子多圈绝对值编码器,以便解决现有技术中存在的技术问题。
2、为实现上述目的,本技术实施例采用的技术方案如下:
3、第一方面,本技术实施例提供了一种电子多圈绝对值编码器控制方法,应用于电子多圈绝对值编码器中的控制器,所述电子多圈绝对值编码器至少包括:角度采集单元、所述控制器以及至少一对磁开关;所述方法包括:
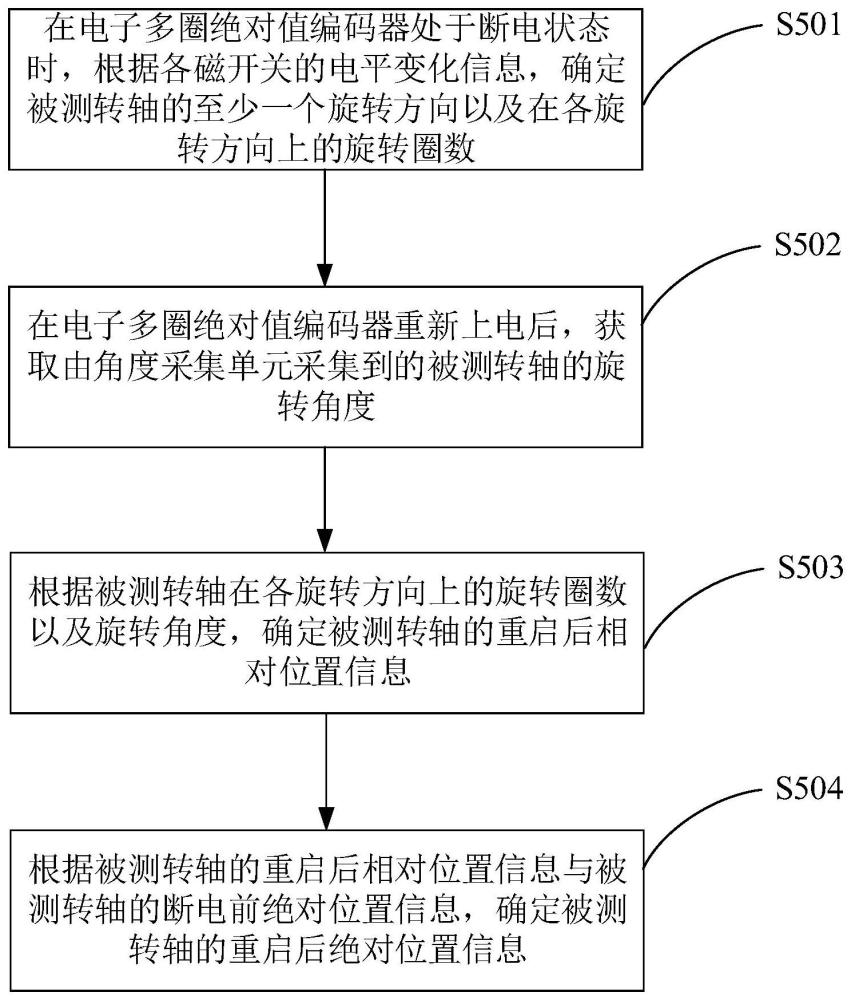
4、在所述电子多圈绝对值编码器处于断电状态时,根据各所述磁开关的电平变化信息,确定被测转轴的至少一个旋转方向以及在各所述旋转方向上的旋转圈数;
5、在所述电子多圈绝对值编码器重新上电后,获取由所述角度采集单元采集到的所述被测转轴的旋转角度;
6、根据所述被测转轴在各所述旋转方向上的旋转圈数以及所述旋转角度,确定所述被测转轴的重启后相对位置信息;
7、根据所述被测转轴的重启后相对位置信息与所述被测转轴的断电前绝对位置信息,确定所述被测转轴的重启后绝对位置信息。
8、可选地,所述电子多圈绝对值编码器还包括:系统总电源以及分压电阻;所述分压电阻的一端与所述系统总电源的输出端连接,所述分压电阻的另一端与所述控制器连接;
9、所述根据各所述磁开关的电平变化信息,确定被测转轴的至少一个旋转方向以及在各所述旋转方向上的旋转圈数之前,还包括:
10、根据所述分压电阻另一端的输出电平,则确定所述系统总电源是否正常供电;
11、若否,则确定所述电子多圈绝对值编码器处于断电状态。
12、可选地,所述根据各所述磁开关的电平变化信息,确定被测转轴的至少一个旋转方向以及在各所述旋转方向上的旋转圈数,包括:
13、根据各所述磁开关输出的电平序列,确定所述被测转轴的至少一个旋转方向,所述电平序列中包括多个依次排列的电平值;
14、根据各旋转方向对应的电平序列的循环次数,确定所述被测转轴在各旋转方向上的旋转圈数。
15、可选地,所述根据各所述磁开关输出的电平序列,确定所述被测转轴的至少一个旋转方向,包括:
16、若各所述磁开关输出的电平序列与正转方向对应的各所述磁开关输出的电平序列的相同,则确定所述被测转轴的旋转方向为正转;
17、若各所述磁开关输出的电平序列与反转方向对应的各所述磁开关输出的电平序列相同,则确定所述被测转轴的旋转方向为反转。
18、可选地,所述根据所述被测转轴在各所述旋转方向上的旋转圈数以及所述旋转角度,确定所述被测转轴的重启后相对位置信息,包括:
19、根据正转方向的旋转圈数以及反转方向的旋转圈数,确定相对旋转方向以及所述相对旋转方向上的旋转圈数;
20、根据所述相对旋转方向、所述相对旋转方向上的旋转圈数以及所述旋转角度,确定所述被测转轴的重启后相对位置信息。
21、可选地,所述根据所述被测转轴的重启后相对位置信息与所述被测转轴的断电前绝对位置信息,确定所述被测转轴的重启后绝对位置信息,包括:
22、将所述被测转轴的重启后相对位置信息与所述被测转轴的被测转轴的断电前绝对位置信息进行求和处理,将求和结果作为所述被测转轴的重启后绝对位置信息。
23、可选地,所述方法还包括:
24、若否,则确定所述电子多圈绝对值编码器处于未断电状态,获取由所述角度采集单元采集到的所述被测转轴的当前位置信息;
25、根据所述当前位置信息与预先记录的初始零位信息,确定所述被测转轴的绝对位置信息。
26、第二方面,本技术实施例还提供了一种电子多圈绝对值编码器,包括:角度采集单元、控制器以及至少一对磁开关;所述控制器分别与所述角度采集单元以及各所述磁开关通信连接;
27、各所述磁开关,用于在所述电子多圈绝对值编码器处于断电状态时,根据被测转轴的旋转方向以及在各所述旋转方向上的旋转圈数,输出电平变化信息;
28、所述角度采集单元,用于在所述电子多圈绝对值编码器重新上电后,采集被测转轴的旋转角度,并将采集到的所述被测转轴的旋转角度发送至所述控制器;
29、所述控制器,用于在所述电子多圈绝对值编码器处于断电状态时,根据各所述磁开关的电平变化信息,确定被测转轴的至少一个旋转方向以及在各所述旋转方向上的旋转圈数;并根据所述被测转轴在各所述旋转方向上的旋转圈数以及获取到的所述旋转角度,确定所述被测转轴的重启后相对位置信息;以及根据所述被测转轴的重启后相对位置信息与所述被测转轴的断电前绝对位置信息,确定所述被测转轴的重启后绝对位置信息。
30、可选地,所述电子多圈绝对值编码器还包括:系统总电源以及分压电阻;
31、所述分压电阻的一端与所述系统总电源的输出端连接,所述分压电阻的另一端与所述控制器连接;
32、所述控制器,用于根据所述分压电阻的输出电平,确定所述系统总电源是否正常供电;若否,则确定所述电子多圈绝对值编码器处于断电状态。
33、可选地,所述电子多圈绝对值编码器还包括:备用电源、第一二极管以及第二二极管;
34、所述第一二极管的一端与所述系统总电源的输出端连接,所述第一二极管的另一端分别与所述第二二极管的另一端、以及各所述磁开关的稳压电源端连接;
35、所述第二二极管的一端与所述备用电源的输出端连接;
36、所述备用电源,用于在所述系统总电源断电后,向所述控制器以及各所述磁开关提供电能。
37、本技术的有益效果是:
38、本技术实施例提供一种电子多圈绝对值编码器控制方法及电子多圈绝对值编码器,该电子多圈绝对值编码器包括:角度采集单元、所述控制器以及至少一对磁开关,在电子多圈绝对值编码器处于断电状态时,可以通过各磁开关输出的电平变化信息,判定被测转轴在至少一个旋转方向上的旋转圈数;在电子多圈绝对值编码器重新上电后,获取由角度采集单元采集到的被测转轴的旋转角度;然后,基于被测转轴在至少一个旋转方向上的旋转圈数、旋转角度以及被测转轴的断电前绝对位置信息,计算得到被测转轴的重启后绝对位置信息,断电后快速响应,能够及时处理被测转轴的计圈信息,实现了断电后被测转轴的位置记忆,且本方案具有使用器件少、实现逻辑简单、可靠性高、功耗低以及可实现低成本小型化等优势,解决了现有技术中传统的多圈绝对值编码器因器件多无法实现低成本小型化和系统快速响应的需求的问题。
- 还没有人留言评论。精彩留言会获得点赞!