动态权重分配方法及系统、目标物体的信息获取方法
本公开涉及无人驾驶,尤其涉及一种动态权重分配方法及系统、目标物体的信息获取方法。
背景技术:
1、在无人驾驶的环境感知中,通常使用摄像头、激光雷达和毫米波雷达等传感器单独实现环境感知任务,通常采用激光雷达实现障碍物、行人等移动或者静态目标的检测,从激光雷达可以输出包含三维空间坐标以及反射强度的点云信息。该类型传感器精度高,分辨率高,探测距离较远,但容易受到环境的影响,成本高;毫米波雷达可以直接获得障碍物的列表信息,包括障碍物id类别、障碍物的三维位置坐标、障碍物的相对速度、位置反差、速度反差、虚警概率﹑多普勒有效解等数据;该类型传感器探测距离远,穿透能力强,但数据不稳定。
2、现有技术中公开的基于激光和毫米波雷达特征融合的目标检测方法,需要对激光雷达和4d毫米波雷达的扫描数据进行不同的处理和转换,以获得伪图像表示和特征提取;这涉及到复杂的数据处理流程和算法,大大增加了系统的复杂性和开发的难度;使用卷积神经网络进行特征提取和特征注意力机制网络进行权重调整,需要大量的计算资源和算力支持,这会对嵌入式设备或计算资源有限的系统造成负担,并限制了该技术在资源受限环境下的应用。
技术实现思路
1、有鉴于此,本公开实施例提供了一种动态权重分配方法及系统、目标物体的信息获取方法,能够实现激光雷达和毫米波数据的融合,提高数据采集的精准度,提高目标识别系统稳定性,成本低、效率高、节约资源。
2、第一方面,本公开实施例提供了一种动态权重分配方法,包括:
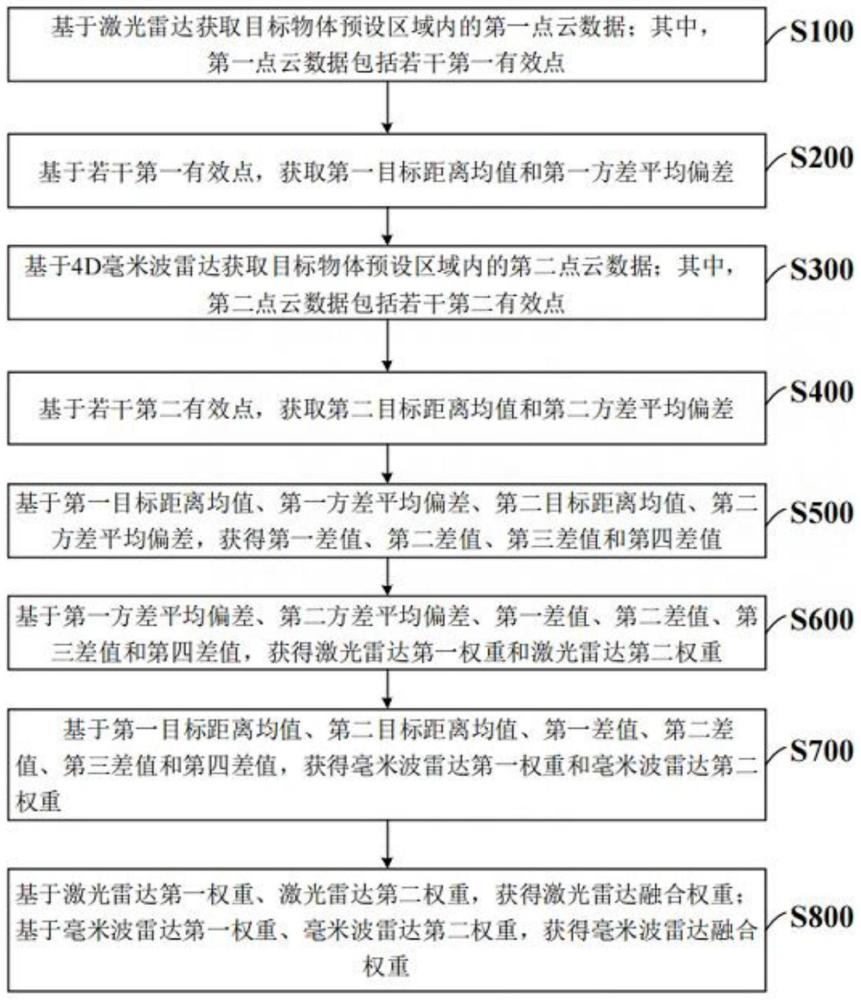
3、基于激光雷达获取目标物体预设区域内的第一点云数据;所述第一点云数据包括若干第一有效点;
4、基于若干所述第一有效点,获取第一目标距离均值和第一方差平均偏差;
5、基于4d毫米波雷达获取目标物体预设区域内的第二点云数据;所述第二点云数据包括若干第二有效点;
6、基于若干所述第二有效点,获取第二目标距离均值和第二方差平均偏差;
7、基于所述第一目标距离均值、所述第一方差平均偏差、所述第二目标距离均值、所述第二方差平均偏差,获得第一差值、第二差值、第三差值和第四差值;
8、基于所述第一方差平均偏差、所述第二方差平均偏差、所述第一差值、所述第二差值、所述第三差值和所述第四差值,获得激光雷达第一权重和激光雷达第二权重;
9、基于所述第一目标距离均值、所述第二目标距离均值、所述第一差值、所述第二差值、所述第三差值和所述第四差值,获得毫米波雷达第一权重和毫米波雷达第二权重;
10、基于所述激光雷达第一权重、所述激光雷达第二权重,获得激光雷达融合权重;
11、基于所述毫米波雷达第一权重、所述毫米波雷达第二权重,获得毫米波雷达融合权重。
12、可选地,所述第一目标距离均值为ll,所述第一方差平均偏差为dl;
13、
14、
15、其中,r为所述第一有效点的个数、d(p,cr)为预设区域内的任一点p到预设区域几何中心点cr的距离、是预设区域内若干所述第一有效到预设区域几何中心点的平均距离、为预设区域内若干个所述第一有效点的方差。
16、可选地,所述第二目标距离均值为lr,所述第二方差平均偏差为dr;
17、
18、
19、其中,n(r)为所述第二有效点的个数,di为第i个所述第二有效点的距离。
20、可选地,所述第一差值为dl,所述第二差值为dr,所述第三差值为ll,所述第四差值为lr;
21、dl=p1dl+p2dr-dl;
22、dr=p1dl+p2dr-dr;
23、ll=n1ll+n2lr-ll;
24、lr=n1ll+n2lr-lr;
25、0≤p1≤1,0≤p2≤1且p1+p2=1;
26、0≤n1≤1,0≤n2≤1且n1+n2=1。
27、可选地,p1=p2=n1=n2=0.5。
28、可选地,所述激光雷达第一权重为wl1,所述激光雷达第二权重为wl2;
29、
30、
31、可选地,所述毫米波雷达第一权重为wr1,所述毫米波雷达第二权重为wr2;
32、
33、
34、可选地,所述激光雷达融合权重为wl,所述毫米波雷达权重为wr;
35、wl=wl1+wl2;
36、wr=wr1+wr2。
37、本技术的第二方面公开了一种动态权重分配系统,包括:
38、第一获取模块,配置为基于激光雷达获取目标物体预设区域内的第一点云数据;所述第一点云数据包括若干第一有效点;
39、第二获取模块,配置为基于若干所述第一有效点,获取第一目标距离均值和第一方差平均偏差;
40、第三获取模块,配置为基于4d毫米波雷达获取目标物体预设区域内的第二点云数据;所述第二点云数据包括若干第二有效点;
41、第四获取模块,配置为基于若干所述第二有效点,获取第二目标距离均值和第二方差平均偏差;
42、第五获取模块,配置为基于所述第一目标距离均值、所述第一方差平均偏差、所述第二目标距离均值、所述第二方差平均偏差,获得第一差值、第二差值、第三差值和第四差值;
43、第六获取模块,配置为基于所述第一方差平均偏差、所述第二方差平均偏差、所述第一差值、所述第二差值、所述第三差值和所述第四差值,获得激光雷达第一权重和激光雷达第二权重;
44、第七获取模块,配置为基于所述第一目标距离均值、所述第二目标距离均值、所述第一差值、所述第二差值、所述第三差值和所述第四差值,获得毫米波雷达第一权重和毫米波雷达第二权重;
45、第八获取模块,配置为基于所述激光雷达第一权重、所述激光雷达第二权重,获得激光雷达融合权重;
46、基于所述毫米波雷达第一权重、所述毫米波雷达第二权重,获得毫米波雷达融合权重。
47、本技术的第三方面公开了一种目标物体的信息获取方法,该方法基于所述的动态权重分配方法,还包括:
48、根据所述激光雷达融合权重、所述毫米波雷达融合权重以及预设公式,获得目标物体信息;
49、所述目标物体信息包括相对角速度α、相对速度v、目标物体x坐标值x、目标物体y坐标值y和目标物体z坐标值z;
50、α=αlwl+αrwr;
51、v=vlwl+vrwr;
52、
53、
54、
55、
56、
57、
58、
59、
60、
61、其中,αl为激光雷达与目标物体的相对角速度,αr为毫米波雷达与目标物体的相对角速度,vl为激光雷达与目标物体的相对速度,vr为毫米波雷达与目标物体的相对速度,为激光雷达有效点集中x方向上的最大值、为毫米波雷达有效点集中x方向上的最大值、为为激光雷达有效点集中x方向上的最小值、为毫米波雷达有效点集中x方向上的最小值、为激光雷达有效点集中y方向上的最大值、为毫米波雷达有效点集中y方向上的最大值、为激光雷达有效点集中y方向上的最小值、为毫米波雷达有效点集中y方向上的最小值、为激光雷达有效点集中z方向上的最大值、为毫米波雷达有效点集中z方向上的最大值、为激光雷达有效点集中z方向上的最小值、为毫米波雷达有效点集中z方向上的最小值。
62、第四方面,本公开实施例还提供了一种电子设备,采用如下技术方案:
63、所述电子设备包括:
64、至少一个处理器;以及,
65、与所述至少一个处理器通信连接的存储器;其中,
66、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行以上任一所述的动态权重分配方法。
67、第四方面,本公开实施例还提供了一种计算机可读存储介质,该计算机可读存储介质存储计算机指令,该计算机指令用于使计算机执行以上任一所述的动态权重分配方法。
68、本技术公开的动态权重分配方法,通过同时利用激光雷达和4d毫米波雷达获取的点云数据,可以提高目标检测和测距的准确性和可靠性,充分发挥不同传感器的优势,提升感知系统的性能:基于目标距离均值、方差平均偏差等多维度特征进行权重分配,能够更全面地考量目标在预设区域内的空间分布特征,使得权重更具代表性和准确性;通过根据目标距离均值、方差平均偏差计算得到的权重,实现对激光雷达和毫米波雷达的权重动态调整,能够适应不同环境和场景下目标检测的需求,提高了系统的灵活性和鲁棒性;基于多组差值计算得到激光雷达和毫米波雷达的权重,可以一定程度上减小数据噪声的影响,提高系统对不同干扰的鲁棒性,从而提高了目标检测的准确性和稳定性。
69、上述说明仅是本公开技术方案的概述,为了能更清楚了解本公开的技术手段,而可依照说明书的内容予以实施,并且为让本公开的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!