机器人定位方法、系统、计算机设备及存储介质与流程
本技术涉及机器人,尤其涉及一种机器人定位方法、系统、计算机设备及存储介质。
背景技术:
1、随着科学技术的快速发展,越来越多的场景开始使用机器人代替人工操作,例如,移动机器人在仓储物流中发挥着重要作用,随着移动机器人的应用逐渐广泛,机器人定位成为机器人应用的一个核心技术。在复杂的真实环境中,机器人易因各种突发事件导致定位丢失,如何提高机器人定位丢失的可靠性是机器人应用中的一项难题,通用的定位丢失检测技术通常依赖单次的传感器数据,这种方法在各种复杂的真实环境中效果不佳、误判率高。
技术实现思路
1、本技术实施例的主要目的在于提出一种机器人定位方法、系统、计算机设备及存储介质,能够提高机器人的定位判断效率,避免位置误判。
2、为实现上述目的,本技术实施例的第一种机器人定位方法,所述方法包括:
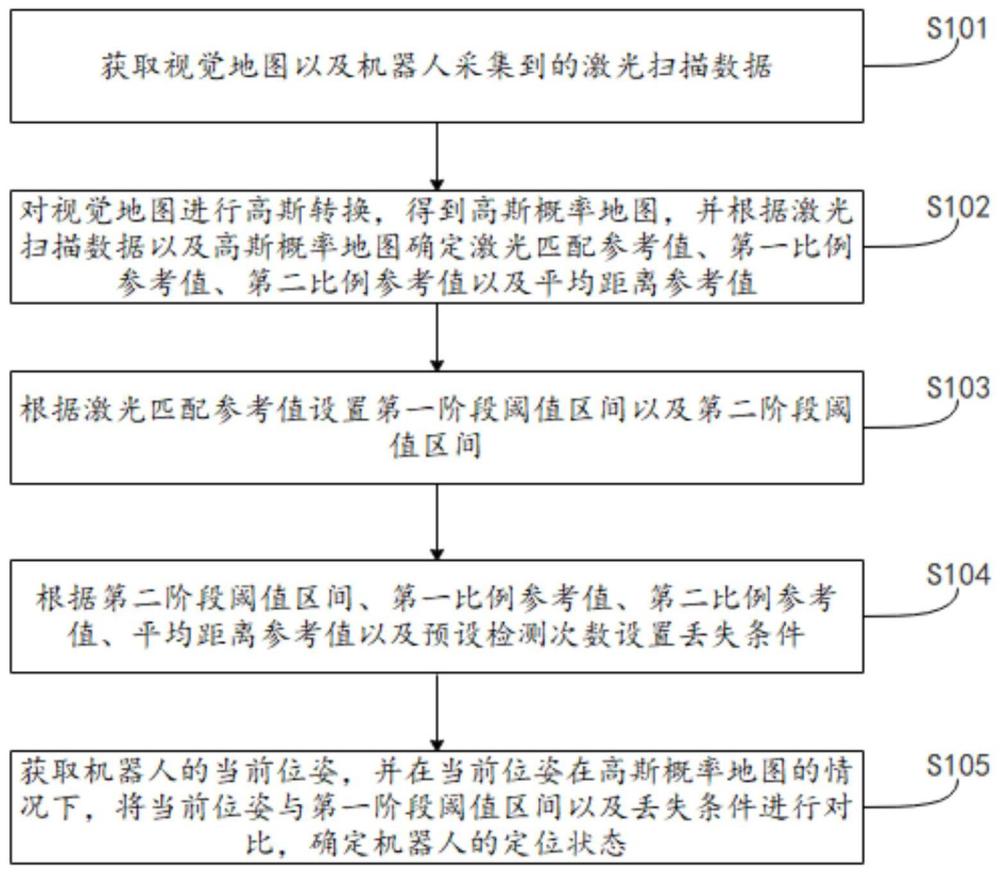
3、获取视觉地图以及机器人采集到的激光扫描数据;
4、对所述视觉地图进行高斯转换,得到高斯概率地图,并根据所述激光扫描数据以及所述高斯概率地图确定激光匹配参考值、第一比例参考值、第二比例参考值以及平均距离参考值,其中,所述激光匹配参考值用于表征所述激光扫描数据与所述高斯概率地图的匹配程度,所述第一比例参考值用于表征所述激光扫描数据穿透所述高斯概率地图的点数比例,所述第二比例参考值用于表征所述激光扫描数据与所述高斯概率地图的距离比例,所述平均距离参考值用于表征所述激光扫描数据到所述高斯概率地图的平均距离;
5、根据所述激光匹配参考值设置第一阶段阈值区间以及第二阶段阈值区间;
6、根据所述第二阶段阈值区间、所述第一比例参考值、所述第二比例参考值、所述平均距离参考值以及预设检测次数设置丢失条件;
7、获取所述机器人的当前位姿,并在所述当前位姿在所述高斯概率地图的情况下,将所述当前位姿与所述第一阶段阈值区间以及所述丢失条件进行对比,确定所述机器人的定位状态。
8、在一些实施例中,所述对所述视觉地图进行高斯转换,得到高斯概率地图,包括:
9、对所述视觉地图进行特征提取,得到多个特征点,并对所述视觉地图进行激光扫描,得到栅格地图;
10、将所有所述特征点映射到所述栅格地图上,得到激光栅格地图;
11、对所有所述特征点进行数据检测,得到点云数据;
12、将所述激光栅格地图中的每个栅格的概率初始化为对应栅格状态的先验概率,并根据所述点云数据对所述先验概率进行更新,得到高斯概率地图。
13、在一些实施例中,所述根据所述激光扫描数据以及所述高斯概率地图确定激光匹配参考值、第一比例参考值、第二比例参考值以及平均距离参考值,包括:
14、获取所述激光扫描数据的所有激光点坐标,并计算所述激光扫描数据的激光点总数;
15、在所述高斯概率地图上进行临近点搜索,确定目标临近点;
16、将所有所述激光点坐标与所述高斯概率地图上的坐标进行对比,得到第一坐标集合和第二坐标集合,其中,所述第一坐标集合为处于所述高斯概率地图上的激光点坐标,所述第二坐标集合在所述高斯概率地图之外的激光点坐标;
17、基于预设的比例值对所述第一坐标集合和所述第二坐标集合进行高斯得分计算,得到激光匹配参考值;
18、基于预设的高斯分值对所述第一坐标集合进行筛选,得到第三坐标集合;
19、统计所述第二坐标集合以及所述第三坐标集合中的所有激光点的激光个数,并根据所述激光个数以及所述激光点总数得到第一比例参考值;
20、基于预设的距离条件以及所述目标临近点对所述第一坐标集合进行筛选,得到第四坐标集合;
21、计算所述第四坐标集合中所有激光点到所述目标临近点的累计距离;
22、根据所述累计距离以及所述激光点总数得到第二比例参考值;
23、计算所述激光扫描数据上所有激光点与所述高斯概率地图的平均距离,得到平均距离参考值。
24、在一些实施例中,所述基于预设的高斯分值对所述第一坐标集合进行筛选,得到第三坐标集合,包括:
25、对于所述第一坐标集合中的每一个激光点,计算所述激光点的高斯得分;
26、在所述第一坐标集合中筛选出高斯得分小于所述高斯分值的第一目标激光点,并根据所述第一目标激光点生成第三坐标集合。
27、在一些实施例中,所述基于预设的距离条件以及所述目标临近点对所述第一坐标集合进行筛选,得到第四坐标集合,包括:
28、对于所述第一坐标集合中的每一个激光点,计算所述激光点的高斯得分,并计算所述激光点与所述目标临近点的距离,得到目标距离值;
29、根据所述距离条件确定目标高斯得分以及参考距离值;
30、在所述第一坐标集合中筛选出高斯得分小于所述目标高斯得分,并且所述目标距离值大于所述参考距离值的第二目标激光点,并根据所述第二目标激光点生成第四坐标集合。
31、在一些实施例中,所述将所述当前位姿与所述第一阶段阈值区间以及所述丢失条件进行对比,确定所述机器人的定位状态,包括:
32、计算所述当前位姿的激光匹配值;
33、当所述激光匹配值处于所述第一阶段阈值区间,确定所述机器人的定位正常;
34、当所述激光匹配值未处于所述第一阶段阈值区间,将所述当前位姿与所述丢失条件进行对比,确定所述机器人的定位状态。
35、在一些实施例中,所述将所述当前位姿与所述丢失条件进行对比,确定所述机器人的定位状态,包括:
36、将所述当前位姿与所述丢失条件进行对比;
37、在所述当前位姿符合所述丢失条件的情况下,确定所述机器人定位丢失;
38、在所述当前位姿未符合所述丢失条件的情况下,确定所述机器人定位正常。
39、第二方面,本实施例提供了一种机器人定位系统,所述系统包括:
40、地图获取模块,用于获取视觉地图以及机器人采集到的激光扫描数据;
41、高斯转换模块,用于对所述视觉地图进行高斯转换,得到高斯概率地图,并根据所述激光扫描数据以及所述高斯概率地图确定激光匹配参考值、第一比例参考值、第二比例参考值以及平均距离参考值,其中,所述激光匹配参考值用于表征所述激光扫描数据与所述高斯概率地图的匹配程度,所述第一比例参考值用于表征所述激光扫描数据穿透所述高斯概率地图的点数比例,所述第二比例参考值用于表征所述激光扫描数据与所述高斯概率地图的距离比例,所述平均距离参考值用于表征所述激光扫描数据到所述高斯概率地图的平均距离;
42、阈值设置模块,用于根据所述激光匹配参考值设置第一阶段阈值区间以及第二阶段阈值区间;
43、条件设置模块,用于根据所述第二阶段阈值区间、所述第一比例参考值、所述第二比例参考值、所述平均距离参考值以及预设检测次数设置丢失条件;
44、状态确定模块,用于确定所述机器人在所述高斯概率地图中的当前位姿,并将所述当前位姿与所述第一阶段阈值区间以及所述丢失条件进行对比,确定所述机器人的定位状态。
45、本技术实施例的第三方面提出了一种计算机设备,所述计算机设备包括存储器和处理器,其中,所述存储器中存储有计算机程序,所述计算机程序被所述处理器执行时,所述处理器用于执行如第一方面所述的机器人定位方法。
46、本技术实施例的第四方面提出了一种存储介质,所述存储介质为计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,在所述计算机程序被计算机执行时,所述计算机用于执行如本技术第一方面实施例任一项所述的机器人定位方法。
47、本技术实施例提出的机器人定位方法、系统、计算机设备及存储介质,具有如下有益效果:首先,获取视觉地图以及机器人采集到的激光扫描数据,再对视觉地图进行高斯转换,从而能够实现对环境的全面描述,使得机器人能够更准确地感知和理解环境,得到高斯概率地图,并计算激光扫描数据与高斯概率地图的匹配程度以及激光扫描数据在高斯概率地图上的穿透程度,从而能够得到激光扫描数据与高斯概率地图上之间的相似程度,并且能够得到激光扫描数据在高斯概率地图上的匹配情况,从而提高机器人的环境感知能力,得到激光匹配参考值以及第一比例参考值,并计算激光扫描数据与高斯概率地图的距离比例以及激光扫描数据到高斯概率地图的平均距离,从而能够提高机器人的定位精度,减少机器人的定位误差,得到第二比例参考值以及平均距离参考值,之后,根据激光匹配参考值设置第一阶段阈值区间以及第二阶段阈值区间,通过将激光匹配度分成不同的阶段阈值区间,可以对机器人的定位结果进行更详细的评估,再根据第二阶段阈值区间、第一比例参考值、第二比例参考值、平均距离参考值以及预设检测次数设置丢失条件,通过不同条件的组合提高机器人的定位质量,避免出现误判或者错判的情况,最后,获取机器人的当前位姿,并在当前位姿在高斯概率地图中的情况下,并将当前位姿与第一阶段阈值区间以及丢失条件进行对比,确定机器人的定位状态,实现对机器人定位的精准判断。
- 还没有人留言评论。精彩留言会获得点赞!