全平面角度侦测的雷达系统的制作方法
本申请是有关一种雷达系统,特别是指一种全平面角度侦测的雷达系统。
背景技术:
1、为了提高汽车驾驶行车、停车及停车后开门时的安全性,业者将雷达应用在汽车侦测配备的领域上,举例来说:雷达的盲点侦测辅助系统(blind spot detection,bsd)、车道变换辅助系统(lane change assistance,lca)、车道偏移辅助系统(lane departurewarning,ldw)、后方车测辅助系统(rear cross traffic alert,rcta)、车道偏移辅助系统(front collisionwarning,fcw)、开门警示辅助系统(door opean waring,dow)以及自动紧急煞车辅助系统(autonomous emergency braking,aeb)等应用。
2、而,雷达侦测原理在于对汽车周围发出电磁波,电磁波撞击物体后形成一反射波,由所述反射波沿着发出电磁波的来源路径反射,透过雷达接收反射波,以反射波回传到雷达的时间、频率以及角度,雷达可侦测出所述物体的距离及物体的所在位置。
3、然而,目前雷达规格本身的限制,侦测角度有相当的限制,经常发生死角不被侦测而有疏漏的问题。另一方面,汽车在实际使用雷达侦测的环境非常复杂,雷达系统除了直接接收到来自于实际目标的雷达反射讯号之外,也会接收到其他同样由目标物反射,但因为有其他反射物中继,而使得雷达传输路径不同的雷达反射讯号,一般称之为多路径讯号。在这个情况下,雷达系统除了会感测到和原发射角度相同的实际目标以外,还会感测到不同角度且虚拟的镜像目标,由于镜像目标所走的雷达传输路径与实际目标的雷达传输路径不同,因此,雷达系统会对于实际目标的位置及角度产生判断失真的问题,即,雷达系统有可能误将镜像目标当成实际目标,或者把镜像目标以及实际目标都当成实际存在的物体,进而产生误判的问题。
技术实现思路
1、本申请的主要目的在于改善过去雷达侦测角度不足及因侦测到虚拟的镜像目标导致侦测失真的问题。
2、所述目的并不妨碍其他目的的存在。若本领域技术人员自说明书、申请专利范围或图式等的记载可以导出的目的,也包含在本申请目的中。因此,本申请的目的不局限于所述列举的目的。
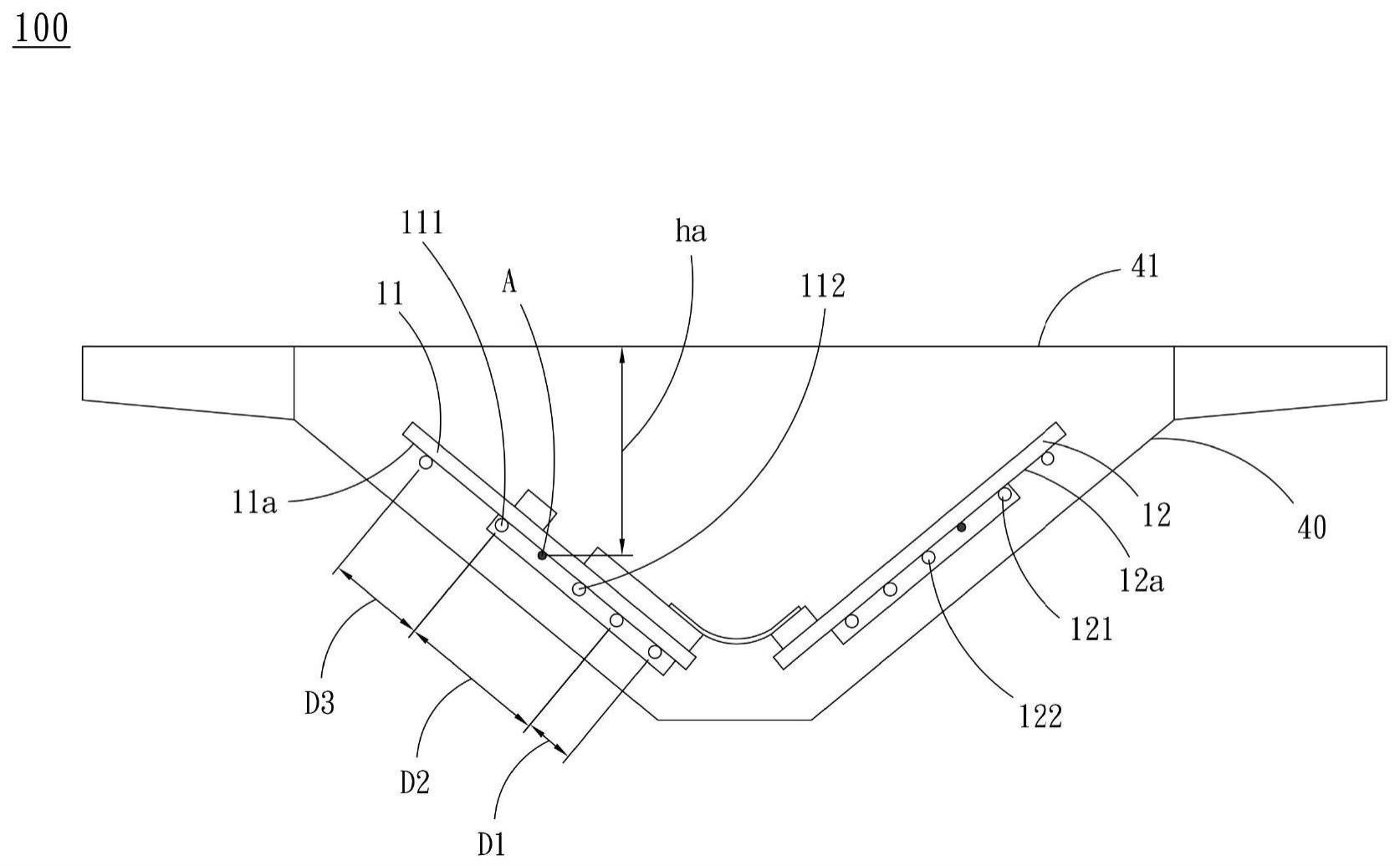
3、为达上述目的,本申请提供一种全平面角度侦测的雷达系统,雷达系统设于一车体的一外表面上,用以侦测车体外的一物体,雷达系统包含有一天线收发单元、一遮蔽单元及一向量传感器。天线收发单元具有一第一天线收发基板及一第二天线收发基板,第一天线收发基板与第二天线收发基板的各一端以一夹角固定连接,而遮蔽单元与天线收发单元设置于车体的同一侧表面,遮蔽单元用以遮蔽虚拟的一镜像目标的反射信号。而向量传感器耦接天线收发单元,向量传感器取得物体在一区段时间内相对天线收发单元的一相对速度以及一相对角度,向量传感器包含有一毫米波感测模块,毫米波感测模块用以确认当相对速度为零时,相对角度是否为九十度。
4、在一较佳实施例中,所述第一天线收发基板与第二天线收发基板分别设置有至少四接收天线及一接收天线中心,而第一天线收发基板与第二天线收发基板分别设置有至少一发射天线。
5、在一较佳实施例中,所述各接收天线间的间隔距离比例,由远离所述外表面至靠近所述外表面的方向依序为1:3:2。
6、在一较佳实施例中,所述各接收天线相对于外表面的垂直距离为h,遮蔽单元相对于外表面一侧的垂直高度为hb,其满足下列条件:0<hb/h<0.4。
7、在一较佳实施例中,所述接收天线中心与地面的距离大于40cm。
8、在一较佳实施例中,所述接收天线中心与外表面的垂直距离小于或等于6.5cm。
9、在一较佳实施例中,所述各接收天线与遮蔽单元的间距介于5cm至70cm之间。
10、在一较佳实施例中,所述雷达系统更具有一壳体,壳体具有一底面,底面贴设于外表面,而壳体容置有天线收发单元及向量传感器。
11、在一较佳实施例中,所述接收天线中心与底面的垂直距离小于或等于2cm。
12、在一较佳实施例中,所述天线收发单元及遮蔽单元位于同一水平平面。
13、在一较佳实施例中,所述夹角介于45度及135度之间。
14、在一较佳实施例中,所述遮蔽单元的平均表面粗糙度小于5cm。
15、在一较佳实施例中,所述物体为静止物,且车体的行驶方向与物体不在同一条直线上。
16、在一较佳实施例中,所述物体为移动物,车体的行驶方向与物体的移动方向为平行移动,且不在同一条直线上。
17、在一较佳实施例中,所述雷达系统更具有一与天线收发单元及向量传感器耦接的纪录模块,纪录模块用以纪录在区段时间内,相对速度以及相对角度的瞬间数值,向量传感器由纪录模块而取得车体与物体相对的一行车讯号处理模块,由行车讯号处理模块与毫米波感测模块进行比对,而可确认天线收发单元侦测角度的正确性。
18、因此,本申请以第一天线收发基板与第二天线收发基板固定连接,来达到增加侦测角度的功效,以及遮蔽单元可防止侦测到虚拟的一镜像目标的反射信号,导致失真的问题。
技术特征:
1.一种全平面角度侦测的雷达系统,雷达系统设于一车体的一外表面上,用以侦测该车体外的一物体,雷达系统,其特征在于:包含,
2.根据权利要求1所述的全平面角度侦测的雷达系统,其特征在于:
3.根据权利要求2所述的全平面角度侦测的雷达系统,其特征在于:
4.根据权利要求2所述的全平面角度侦测的雷达系统,其特征在于:
5.根据权利要求2所述的全平面角度侦测的雷达系统,其特征在于:
6.根据权利要求2所述的全平面角度侦测的雷达系统,其特征在于:
7.根据权利要求2所述的全平面角度侦测的雷达系统,其特征在于:
8.根据权利要求2所述的全平面角度侦测的雷达系统,其特征在于:
9.根据权利要求8所述的全平面角度侦测的雷达系统,其特征在于:
10.根据权利要求1所述的全平面角度侦测的雷达系统,其特征在于:
11.根据权利要求1所述的全平面角度侦测的雷达系统,其特征在于:
12.根据权利要求1所述的全平面角度侦测的雷达系统,其特征在于:
13.根据权利要求1所述的全平面角度侦测的雷达系统,其特征在于:
14.根据权利要求1所述的全平面角度侦测的雷达系统,其特征在于:
技术总结
本技术为一种全平面角度侦测的雷达系统,雷达系统设于一车体的一外表面上,用以侦测车体外的一物体,雷达系统包含有一天线收发单元、一遮蔽单元及一向量传感器。天线收发单元具有一第一天线收发基板及一第二天线收发基板,第一天线收发基板与第二天线收发基板的各一端以一夹角固定连接,而遮蔽单元用以遮蔽虚拟的一镜像目标的反射信号,向量传感器耦接天线收发单元,向量传感器取得物体在一区段时间内相对天线收发单元的一相对速度以及一相对角度,向量传感器包含有一毫米波感测模块,毫米波感测模块用以确认当相对速度为零时,相对角度是否为九十度。因此,本技术可以达到提升雷达侦测的角度,以及雷达侦测角度准确性的功效。
技术研发人员:尤山泉,蔡青翰,王文政,程飞,满懿
受保护的技术使用者:为升科(上海)科技电子有限公司
技术研发日:20230227
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!