一种无人机飞行高度检测装置的制作方法
本技术属于检测装置,具体涉及一种无人机飞行高度检测装置。
背景技术:
1、无人机是无人驾驶飞机的简称,是利用无线电遥控设备和自备的程序控制装置的不载人飞机,包括无人直升机、固定翼机、多旋翼飞行器等,随着无人机技术的发展,无人机在民用领域的应用越来越广泛,无人机在生产完成后需要对无人机进行检测,检测项目多样,定位精准度检测使检测其中一项。
2、对无人机飞行高度检测时,通过位移传感器检测无人机的飞行高度,然后与无人机自身定位显示高度进行比对,从而得出无人机高度定位的准确性,但是这种检测方式依靠传感器检测无人机的高度,若其出现故障时,不便于排查是无人机定位故障还是检测设备的问题,因此需要一种可以直观检测无人机飞行高度的装置,来验证无人机定位系统的准确性,并排查飞行高度值的差异是怎么造成的。
技术实现思路
1、本实用新型的目的在于提供一种无人机飞行高度检测装置,它便于直观的测量无人机的高度,可以排查出无人机飞行高度差异产生的原因,以解决上述背景技术中提出的问题。
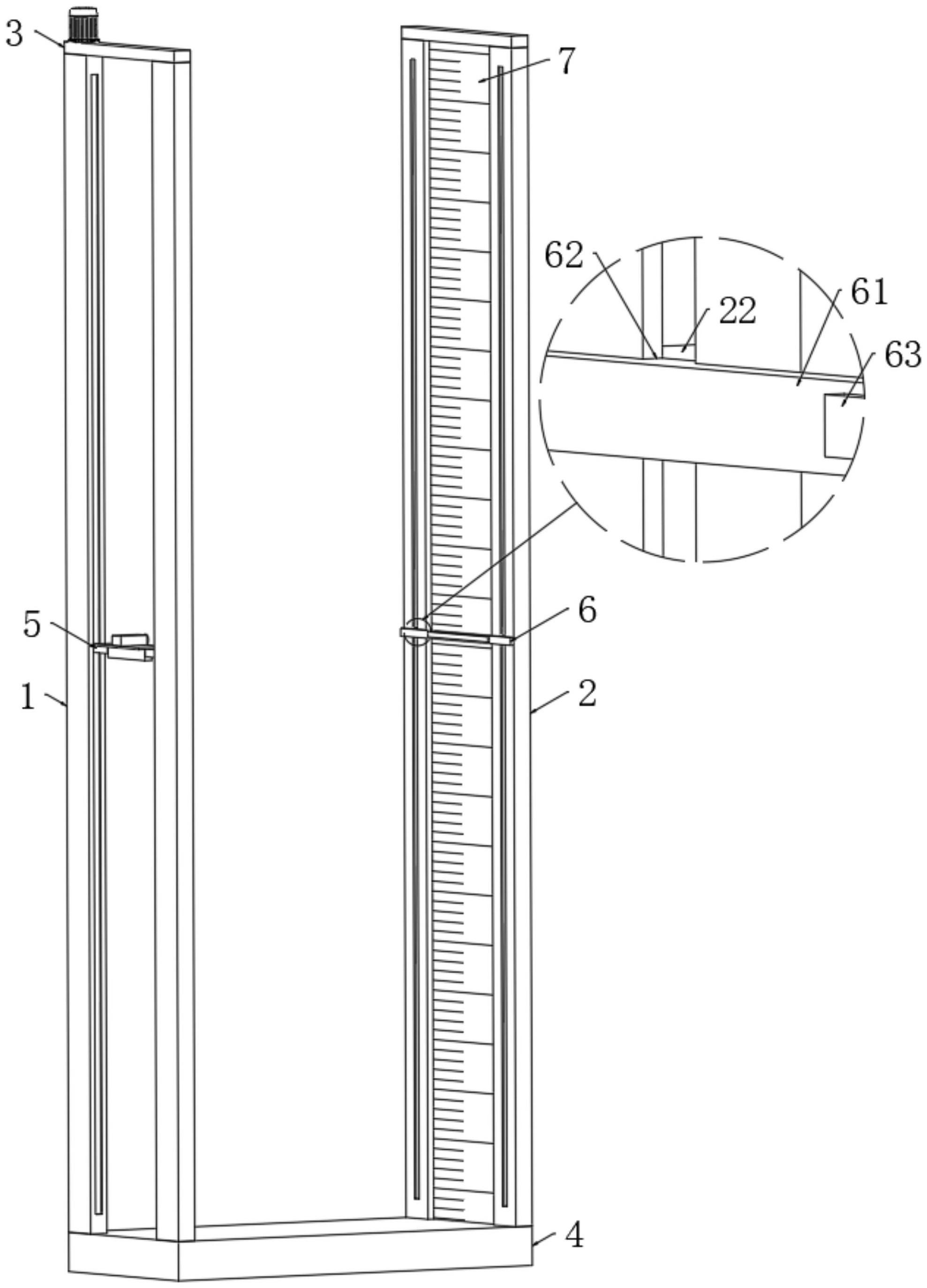
2、为实现上述目的,本实用新型提供如下技术方案:一种无人机飞行高度检测装置,包括两个对应设置的第一升降组件和两个对应设置的第二升降组件,其特征在于:两个所述第一升降组件之间设置有测视组件,两个所述第二升降组件之间设置有定位组件和对照背景板,所述定位组件设置在对照背景板的一侧,所述测视组件与定位组件对应设置,两个所述第一升降组件的顶端之间设置有驱动组件,两个所述第一升降组件的底端设置有传动组件,两个所述第一升降组件和两个所述第二升降组件分别设置在传动组件顶端的四个边角。
3、进一步的,所述第一升降组件包括第一柱形壳所述第一柱形壳的内部设置有第一升降块,所述第一柱形壳的内部转动连接有第一螺杆,所述第一螺杆与第一升降块螺纹传动连接。
4、进一步的,所述第二升降组件包括第二柱形壳,所述第二柱形壳的内部设置有第二升降块,所述第二柱形壳的内部转动连接有第二螺杆,所述第二螺杆与第二升降块螺纹传动连接。
5、进一步的,所述驱动组件包括固定连接在两个所述第一柱形壳顶端之间的连接壳,两个所述第一螺杆侧壁的顶端均固定套设有带轮,两个所述带轮通过皮带传动连接,所述连接壳的顶端固定连接有正反电机,所述正反电机的输出轴与其中一个所述第一螺杆的顶端固定连接。
6、进一步的,所述传动组件包括底座,两个所述第一柱形壳和两个所述第一升降块均固定连接在底座的顶端,所述第一螺杆和第二螺杆侧壁的底端均固定套设有第一锥齿轮,所述底座的内部转动连接有两个对称分布的转轴,两个所述转轴的两端均固定套设有第二锥齿轮,四个所述第二锥齿轮分别与四个所述第一锥齿轮啮合连接。
7、进一步的,所述测视组件包括两个对称分部的连接杆,两个所述连接杆分别与两个所述第一升降块的一侧固定连接,两个所述连接杆之间固定连接有t形板,所述t形板的顶端固定安装有摄像机,所述t形板的一侧固定安装有红外光栅发射器。
8、进一步的,所述定位组件包括安装板,所述安装板的一侧对称设置有连接块,两个所述连接块分别与两个所述第二升降块的一侧固定连接,所述连接块的另一侧固定连接有与红外光栅发射器对应设置的红外光栅接收器。
9、与现有技术相比,本实用新型的有益效果是:定位组件与测视组件同步上升,当无人机处于定位组件和测视组件之间时,测视组件的摄像机可以直观拍摄无人机的高度,依据对照背景板直观得知无人机高度信息,此种检测方式便于直观的测量无人机的高度,可以排查出无人机飞行高度差异产生的原因。
技术特征:
1.一种无人机飞行高度检测装置,包括两个对应设置的第一升降组件(1)和两个对应设置的第二升降组件(2),其特征在于:两个所述第一升降组件(1)之间设置有测视组件(5),两个所述第二升降组件(2)之间设置有定位组件(6)和对照背景板(7),所述定位组件(6)设置在对照背景板(7)的一侧,所述测视组件(5)与定位组件(6)对应设置,两个所述第一升降组件(1)的顶端之间设置有驱动组件(3),两个所述第一升降组件(1)的底端设置有传动组件(4),两个所述第一升降组件(1)和两个所述第二升降组件(2)分别设置在传动组件(4)顶端的四个边角。
2.根据权利要求1所述的一种无人机飞行高度检测装置,其特征在于:所述第一升降组件(1)包括第一柱形壳(11)所述第一柱形壳(11)的内部设置有第一升降块(12),所述第一柱形壳(11)的内部转动连接有第一螺杆(13),所述第一螺杆(13)与第一升降块(12)螺纹传动连接。
3.根据权利要求2所述的一种无人机飞行高度检测装置,其特征在于:所述第二升降组件(2)包括第二柱形壳(21),所述第二柱形壳(21)的内部设置有第二升降块(22),所述第二柱形壳(21)的内部转动连接有第二螺杆(23),所述第二螺杆(23)与第二升降块(22)螺纹传动连接。
4.根据权利要求3所述的一种无人机飞行高度检测装置,其特征在于:所述驱动组件(3)包括固定连接在两个所述第一柱形壳(11)顶端之间的连接壳(31),两个所述第一螺杆(13)侧壁的顶端均固定套设有带轮(32),两个所述带轮(32)通过皮带传动连接,所述连接壳(31)的顶端固定连接有正反电机(33),所述正反电机(33)的输出轴与其中一个所述第一螺杆(13)的顶端固定连接。
5.根据权利要求4所述的一种无人机飞行高度检测装置,其特征在于:所述传动组件(4)包括底座(41),两个所述第一柱形壳(11)和两个所述第一升降块(12)均固定连接在底座(41)的顶端,所述第一螺杆(13)和第二螺杆(23)侧壁的底端均固定套设有第一锥齿轮(42),所述底座(41)的内部转动连接有两个对称分布的转轴(43),两个所述转轴(43)的两端均固定套设有第二锥齿轮(44),四个所述第二锥齿轮(44)分别与四个所述第一锥齿轮(42)啮合连接。
6.根据权利要求5所述的一种无人机飞行高度检测装置,其特征在于:所述测视组件(5)包括两个对称分部的连接杆(51),两个所述连接杆(51)分别与两个所述第一升降块(12)的一侧固定连接,两个所述连接杆(51)之间固定连接有t形板(52),所述t形板(52)的顶端固定安装有摄像机(53),所述t形板(52)的一侧固定安装有红外光栅发射器(54)。
7.根据权利要求6所述的一种无人机飞行高度检测装置,其特征在于:所述定位组件(6)包括安装板(61),所述安装板(61)的一侧对称设置有连接块(62),两个所述连接块(62)分别与两个所述第二升降块(22)的一侧固定连接,所述连接块(62)的另一侧固定连接有与红外光栅发射器(54)对应设置的红外光栅接收器(63)。
技术总结
本技术属于检测装置技术领域,具体涉及一种无人机飞行高度检测装置,包括两个对应设置的第一升降组件和两个对应设置的第二升降组件,其特征在于:两个所述第一升降组件之间设置有测视组件,两个所述第二升降组件之间设置有定位组件和对照背景板,所述定位组件设置在对照背景板的一侧,所述测视组件与定位组件对应设置,两个所述第一升降组件的顶端之间设置有驱动组件。本技术,定位组件与测视组件同步上升,当无人机处于定位组件和测视组件之间时,测视组件的摄像机可以直观拍摄无人机的高度,依据对照背景板直观得知无人机高度信息,此种检测方式便于直观的测量无人机的高度,可以排查出无人机飞行高度差异产生的原因。
技术研发人员:武培培,陈圣杰,王梦楠
受保护的技术使用者:北京威标至远科技发展有限公司
技术研发日:20230315
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!