架桥机姿态检测装置的制作方法
本技术属于架桥机,具体涉及架桥机姿态检测装置。
背景技术:
1、架桥机作为桥梁施工中的大型特种设备,已经成为涉水架设钢桥施工中不可或缺的关键性设备,架桥机过孔是架梁施工中的关键工序,同时也是容易发生安全事故的危险工序;进而在架桥机过孔前,需要对架桥机整体姿态进行测量调整,如架桥机中两条横移轨道需处于水平状态,且两条横移轨道之间需保持平行,其通常采用人工的方式进行测量计算,然后判断两条横移轨道是否平行,测量过程繁琐且精度较低,影响了施工进程。
技术实现思路
1、为了解决上述问题,本实用新型提供的架桥机姿态检测装置,实现了多个横移轨道之间平行度的自动检测以及单根横移轨道的水平检测,实现了主梁高差的自动测量、主梁应变的自动测量,为架桥机姿态的调整提供了准确的数据支撑,保障了桥梁的安全施工建设。
2、本实用新型的实施例通过以下技术方案实现:
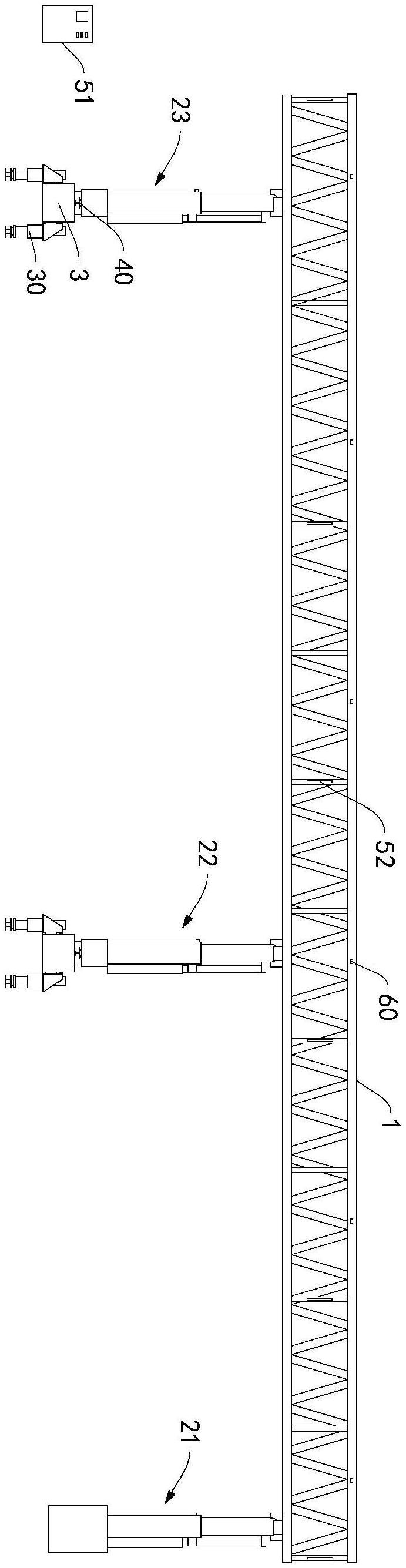
3、架桥机姿态检测装置,配置于架桥机,所述架桥机包括主梁,配置于主梁的前支腿、中支腿和后支腿,所述中支腿和后支腿底部均配置有横移轨道,包括横移轨道姿态检测系统,该横移轨道姿态检测系统包括两组北斗定位传感器组,每组所述北斗定位传感器组包括至少两个北斗定位传感器,所述横移轨道均配置有一组北斗定位传感器组,若干所述北斗定位传感器沿横移轨道长度方向设置。
4、所述横移轨道底部还配置有数个伸缩支腿,所述支腿均匀的分布在横移轨道的两侧,所述伸缩支腿均配置有水平移动机构,所述伸缩支腿通过水平移动机构,可移动的设置在横移轨道上。
5、所述水平移动机构包括:移动支架和设置在横移轨道上的滑轨,所述伸缩支腿固定连接在移动支架上,当伸缩支腿处于固定状态时,所述移动支架固定连接在滑轨上,当伸缩支腿处于移动状态时,所述移动支架可滑动的连接在滑轨上。
6、所述水平移动机构还包括:齿条和摇把,所述齿条设置在横移轨道上,并与滑轨平行设置,所述摇把可转动的设置在移动支架上,所述摇把一端穿过移动支架并与齿条啮合。
7、所述移动支架包括:连接板,设置在横移轨道旁;安装板,设置在连接板底部,用于安装伸缩支腿;导板,固定设置在连接板上,在导板上设置有与滑轨相匹配的凹槽。
8、所述伸缩支腿为电动丝杆升降机,在伸缩支腿底部设置有球铰接地结构,所述球铰接地结构包括万向球头和底盘,所述万向球头一端与伸缩支腿固定,另一端与底盘球铰。
9、架桥机姿态检测装置还包括配置于主梁的主梁高差检测系统,所述主梁高差检测系统包括采集箱和数个静力水准仪,数个静力水准仪分别与采集箱连接,数个所述静力水准仪均布置于主梁,数个静力水准仪通过液管相互连通,数个静力水准仪均位于同一平面设置,且该设置平面位于主梁所处平面上。
10、架桥机姿态检测装置还包括主梁应力监测系统,所述主梁应力监测系统包括数个应变计,数个应变计均匀分布于主梁设置。
11、本实用新型的技术方案至少具有如下优点和有益效果:
12、(1)本实用新型通过设置横移轨道姿态检测系统,利用北斗定位传感器获得所处的三维坐标,即空间坐标(x,y,z)数据信息,在单一横移轨道上,通过两个以上的北斗定位传感器所获得的z轴数据信息,判断横移轨道的两端是否具有高差,从而判断横移轨道自身是否处于水平状态,给横移轨道水平位置的调整提供了精准的数据支撑,以便进行水平调节;在另一方面,利用两个以上的三维坐标信息可确定每个横移轨道所在直线状态,判断两根横移轨道之间是否处于平行状态,检测横移轨道之间是否处于平行状态快速精准,给横移轨道的调整提供了数据支持,保证了横移轨道装配后架桥机整体的安全性。
13、(2)本实用新型通过设置主梁高差检测系统,通过高精度的静力水准仪检测主梁前、中、后的高差,为主梁姿态的调整提供了数据支持,保障了桥梁架设时的安全性。
14、(3)本实用新型通过主梁应力监测系统,利用应变计实现了对主梁应变数据的测量,从而实现对主梁应变情况的监测,当检测到主梁应变超过设置阈值时,可进行报警,从而防止意外情况的发生,提高桥梁施工时的安全性。
15、(4)本实用新型通过设置伸缩支腿实现了对横移轨道竖直方向上位置的调节,其通过在横移轨道上设置水平移动机构,支腿通过水平移动机构与横移轨道连接,即支腿可以在横移轨道上移动,从而调节支腿在横移轨道上的位置。当适用于不同的盖梁和挡块时,可直接通过移动机构,调整单个支腿的位置,适用于各种尺寸的盖梁和挡块。
技术特征:
1.架桥机姿态检测装置,配置于架桥机,所述架桥机包括主梁,配置于主梁的前支腿、中支腿和后支腿,所述中支腿和后支腿底部均配置有横移轨道,其特征在于,包括横移轨道姿态检测系统,该横移轨道姿态检测系统包括两组北斗定位传感器组,每组所述北斗定位传感器组包括至少两个北斗定位传感器,所述横移轨道均配置有一组北斗定位传感器组,若干所述北斗定位传感器沿横移轨道长度方向设置。
2.根据权利要求1所述的架桥机姿态检测装置,其特征在于,所述横移轨道底部还配置有数个伸缩支腿,所述支腿均匀的分布在横移轨道的两侧,所述伸缩支腿均配置有水平移动机构,所述伸缩支腿通过水平移动机构,可移动的设置在横移轨道上。
3.根据权利要求2所述的架桥机姿态检测装置,其特征在于,所述水平移动机构包括:移动支架和设置在横移轨道上的滑轨,所述伸缩支腿固定连接在移动支架上,当伸缩支腿处于固定状态时,所述移动支架固定连接在滑轨上,当伸缩支腿处于移动状态时,所述移动支架可滑动的连接在滑轨上。
4.根据权利要求3所述的架桥机姿态检测装置,其特征在于,所述水平移动机构还包括:齿条和摇把,所述齿条设置在横移轨道上,并与滑轨平行设置,所述摇把可转动的设置在移动支架上,所述摇把一端穿过移动支架并与齿条啮合。
5.根据权利要求4所述的架桥机姿态检测装置,其特征在于,所述移动支架包括:连接板,设置在横移轨道旁;安装板,设置在连接板底部,用于安装伸缩支腿;导板,固定设置在连接板上,在导板上设置有与滑轨相匹配的凹槽。
6.根据权利要求5所述的架桥机姿态检测装置,其特征在于,所述伸缩支腿为电动丝杆升降机,在伸缩支腿底部设置有球铰接地结构,所述球铰接地结构包括万向球头和底盘,所述万向球头一端与伸缩支腿固定,另一端与底盘球铰。
7.根据权利要求1至6任一项所述的架桥机姿态检测装置,其特征在于,还包括配置于主梁的主梁高差检测系统,所述主梁高差检测系统包括采集箱和数个静力水准仪,数个静力水准仪分别与采集箱连接,数个所述静力水准仪均布置于主梁,数个静力水准仪通过液管相互连通,数个静力水准仪均位于同一平面设置,且该设置平面位于主梁所处平面上。
8.根据权利要求7所述的架桥机姿态检测装置,其特征在于,还包括主梁应力监测系统,所述主梁应力监测系统包括数个应变计,数个应变计均匀分布于主梁设置。
技术总结
本技术公开了架桥机姿态检测装置,配置于架桥机,所述架桥机包括主梁,配置于主梁的前支腿、中支腿和后支腿,所述中支腿和后支腿底部均配置有横移轨道,包括横移轨道姿态检测系统,该横移轨道姿态检测系统包括两组北斗定位传感器组,每组所述北斗定位传感器组包括至少两个北斗定位传感器,所述横移轨道均配置有一组北斗定位传感器组,若干所述北斗定位传感器沿横移轨道长度方向设置。本技术实现了多个横移轨道之间平行度的自动检测、单根横移轨道水平度的自动检测,且实现了主梁高差的自动测量、主梁应变的自动测量,为架桥机姿态的调整提供了准确的数据支撑,保障了桥梁的安全施工建设。
技术研发人员:李友兴,殷子,方小波
受保护的技术使用者:四川省交通建设集团有限责任公司
技术研发日:20230323
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!