一种机载激光单点测量装置的制作方法
本技术涉及施工检测,尤其涉及一种机载激光单点测量装置。
背景技术:
1、随着卫星导航定位系统(gnss,global navigation satellite system)的不断发展,单基站实时载波相位差分定位(rtk,real time kinematic)在20公里内的定位可达到厘米级,成熟应用于施工领域,沿海水工结构施工通常包括陆域施工和水域施工等内容,但沿海水域施工受潮汐、风浪、船舶航行等影响,不可控风险较多,类似场景还有极易于淤陷的滩面测量。
2、现有技术中,常规的检测手段有:人工攀爬抛石坝、船舶高低潮检测、架站三维激光扫描、背包式激光,但均存在风险高、效率低的问题,机载三维激光扫描的费用高。
技术实现思路
1、本实用新型的目的在于,提供一种机载激光单点测量装置,解决以上技术问题;
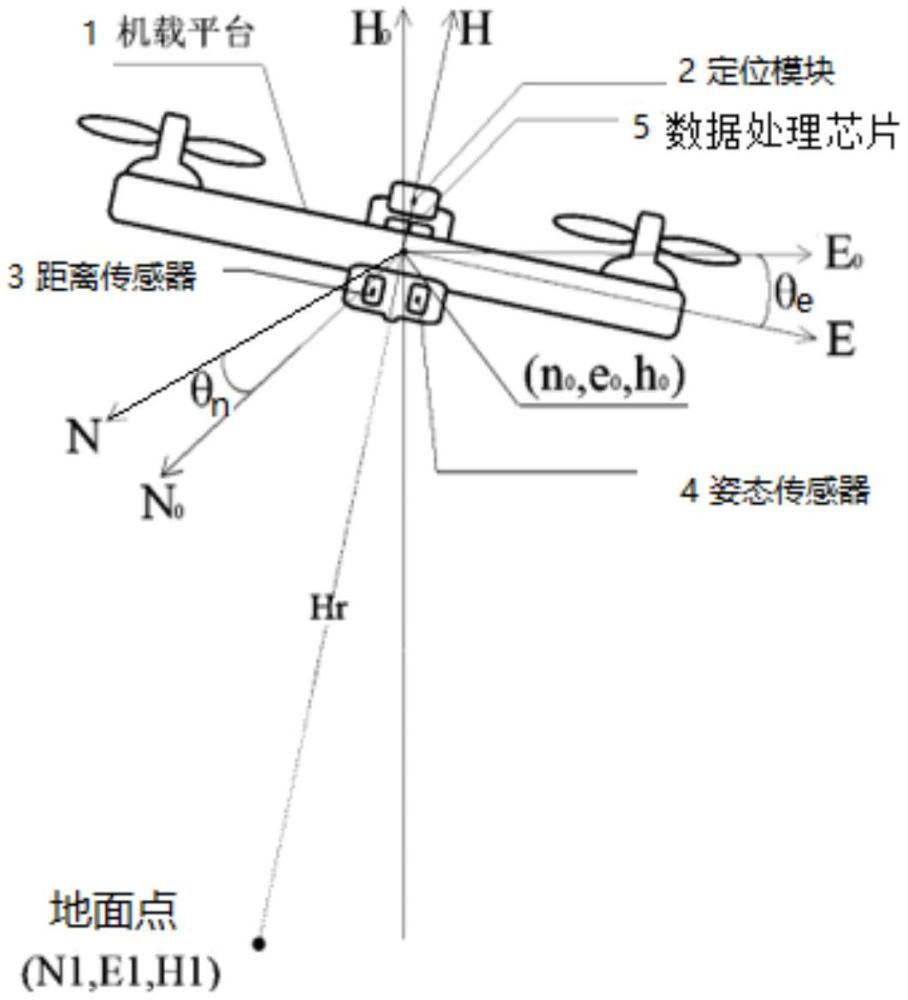
2、一种机载激光单点测量装置,包括:
3、一无人机本体,所述无人机本体包括:
4、一机载平台,所述机载平台上设有:
5、一定位模块,提供三维地心坐标信息和时间信息;
6、一距离传感器,采集所述无人机本体的坐标中心原点至地面的距离,获得测距数据;
7、一姿态传感器,测量所述机载平台相对于所述坐标中心原点的姿态变化,获得姿态数据;
8、一数据处理芯片,连接所述定位模块、所述距离传感器、所述姿态传感器。
9、优选地,所述定位模块采用实时载波相位差分定位模块,所述定位模块提供厘米级的三维坐标以及全球定位系统时间信息作为时间标签。
10、优选地,所述姿态变化包括n轴竖直方向的纵摇、e轴竖直方向的横摇。
11、优选地,所述姿态变化还包括n轴和e轴水平方向的艏向变化值。
12、优选地,所述距离传感器采用高频激光测距传感器,所述高频激光测距传感器的激光发射口朝向地面设置,通过发射激光脉冲并接收地面点反射回来的脉冲信号获得所述测距数据。
13、优选地,所述距离传感器与所述姿态传感器,以经过所述机载平台的中心并垂直于所述机载平台的竖直线对称设置。
14、优选地,所述数据处理芯片选用高性能单片机或微处理器,所述数据处理芯片对实时动态坐标、时间标签、所述姿态数据、所述测距数据进行存储。
15、优选地,还设有一供电电池。
16、本实用新型的有益效果是:由于采用以上技术方案,解决了常规检测手段实施受限的问题,提升了检测效率、远程安全、成本低。
技术特征:
1.一种机载激光单点测量装置,其特征在于,包括:
2.根据权利要求1所述的机载激光单点测量装置,其特征在于,所述定位模块采用实时载波相位差分定位模块,所述定位模块提供厘米级的三维坐标以及全球定位系统时间信息作为时间标签。
3.根据权利要求1所述的机载激光单点测量装置,其特征在于,所述姿态变化包括n轴竖直方向的纵摇、e轴竖直方向的横摇。
4.根据权利要求3所述的机载激光单点测量装置,其特征在于,所述姿态变化还包括n轴和e轴水平方向的艏向变化值。
5.根据权利要求1所述的机载激光单点测量装置,其特征在于,所述距离传感器采用高频激光测距传感器,所述高频激光测距传感器的激光发射口朝向地面设置,通过发射激光脉冲并接收地面点反射回来的脉冲信号获得所述测距数据。
6.根据权利要求5所述的机载激光单点测量装置,其特征在于,所述距离传感器与所述姿态传感器,以经过所述机载平台的中心并垂直于所述机载平台的竖直线对称设置。
7.根据权利要求1所述的机载激光单点测量装置,其特征在于,所述数据处理芯片选用高性能单片机或微处理器,所述数据处理芯片对实时动态坐标、时间标签、所述姿态数据、所述测距数据进行存储。
8.根据权利要求1所述的机载激光单点测量装置,其特征在于,还设有一供电电池。
技术总结
本技术公开了一种机载激光单点测量装置,属于施工检测技术领域;包括:一无人机本体,所述无人机本体包括:一机载平台,所述机载平台上设有:一定位模块,提供三维地心坐标信息和时间信息;一距离传感器,采集所述无人机本体的坐标中心原点至地面的距离,获得测距数据;一姿态传感器,测量所述机载平台相对于所述坐标中心原点的姿态变化,获得姿态数据;一数据处理芯片,连接所述定位模块、所述距离传感器、所述姿态传感器。上述技术方案的有益效果是:解决了常规检测手段实施受限的问题,提升了检测效率、远程安全、成本低。
技术研发人员:汪波,彭光明,焦永强,刘辉,万立健,邹映军,刘龙
受保护的技术使用者:中交上海航道局有限公司
技术研发日:20230330
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!