一种复杂构件力学性能的微磁无损自动检测装置的制作方法
本技术属于用磁的方法测试材料,具体为一种复杂构件力学性能的微磁无损自动检测装置。
背景技术:
1、齿轮、叶片、曲轴等是高端装备的核心关键构件。力学性能检测是上述构件制造工艺优化和质量控制的重要支撑。传统的破坏、抽样式检测方法无法快速获取构件全域的力学性能分布状态。微磁无损检测技术是解决该问题的最佳途径。国内外已开发出检测力学性能的微磁无损检测仪器,直接面向复杂构件,进行多项力学性能指标(硬度、屈服强度等)与残余应力的同步、无损检测。但主要采用手动点扫模式,难以实现变曲率构件的高效、自动扫查。此外,在生产线等应用中,为保证检测位置准确,需将待测构件准确定位,导致人力和工装设备成本的额外增加,同时也不利于提高生产效率。
2、目前针对具有复杂曲面特征的构件检测,缺少专用的扫查机构;因此针对复杂构件的力学性能的快速、自动、无损检测,基于工业机器人和机器视觉的微磁无损检测技术是最佳实现途径,需要一种针对复杂构件的微磁无损自动检测装置。
技术实现思路
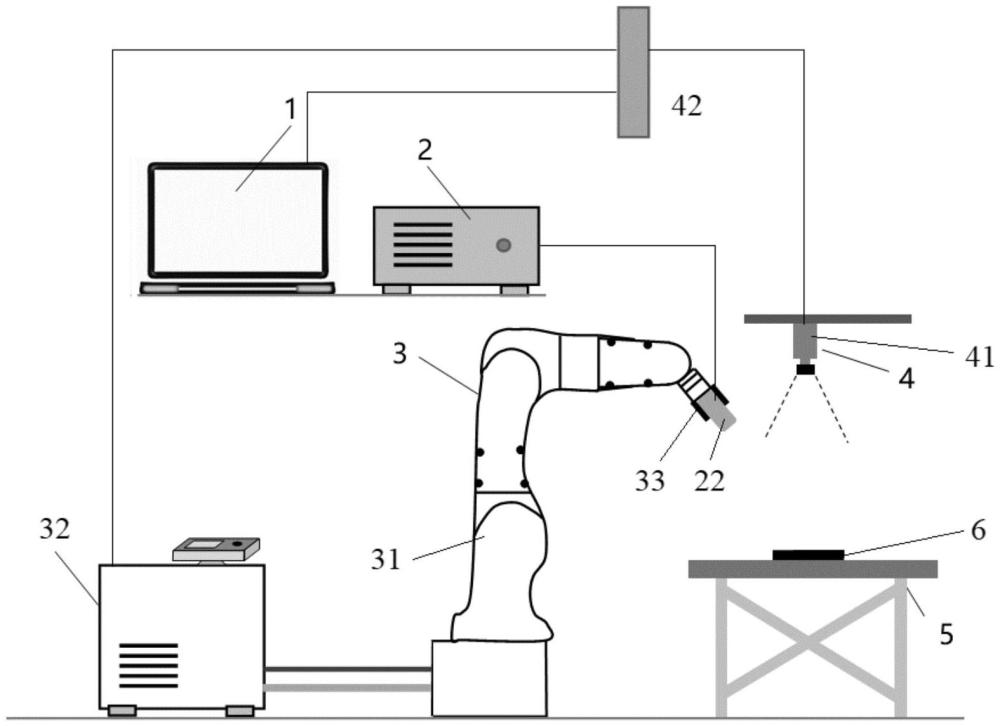
1、针对背景技术中存在的问题,本实用新型提供了一种复杂构件力学性能的微磁无损自动检测装置,实现构件力学性能和残余应力的自动化无损检测,尤其对于位置不固定且具有复杂曲面特征的构件进行检测,其特征在于,包括:主控计算机、微磁检测仪、自动扫查机构、机器视觉单元、工作台和视觉校准板,其中微磁检测仪包括:微磁检测仪主机和微磁传感器,微磁检测仪主机的分别与微磁传感器、与机器人控制器以及与主控计算机相连;
2、自动扫查机构包括:机器人本体、机器人控制器和夹持装置,机器人本体的一端安装于地基上,机器人本体的另一端安装有夹持装置;机器人本体和机器人控制器通过电源与信号集成线缆进行连接和通讯,机器人控制器与主控计算机通过网线进行连接和通讯,微磁传感器通过夹持装置安装于机器人本体的末端法兰上;
3、机器视觉单元包括:智能相机和数据转换单元,智能相机通过数据转换单元和网线分别与主控计算机和机器人控制器相连进行通讯;智能相机通过支架安装于工作台台面的正上方;
4、视觉校准板设置于工作台的台面上,待测构件设置于工作台的台面上方;视觉校准板和待测构件均位于智能相机的正下方。
5、所述待测构件为铁磁性叶片。
6、所述机器人本体为关节式六自由度工业机器人。
7、所述工作台固定于地基上。
8、本实用新型的有益效果在于:通过机器人(扫查路径计算)和与其匹配的智能相机(视觉识别),在每次检测时均可以对检测的初始位置进行定位,并按照新路径进行扫查,实现构件力学性能和残余应力的自动化无损检测,提高了工作效率和自动化程度。
技术特征:
1.一种复杂构件力学性能的微磁无损自动检测装置,其特征在于,包括:主控计算机(1)、微磁检测仪(2)、自动扫查机构(3)、机器视觉单元(4)、工作台(5)和视觉校准板(6),其中微磁检测仪(2)包括:微磁检测仪主机(21)和微磁传感器(22),微磁检测仪主机(21)分别与微磁传感器(22)、与机器人控制器(32)以及与主控计算机(1)相连;
2.根据权利要求1所述的一种复杂构件力学性能的微磁无损自动检测装置,其特征在于,所述待测构件为铁磁性叶片。
3.根据权利要求1所述的一种复杂构件力学性能的微磁无损自动检测装置,其特征在于,所述机器人本体(31)为关节式六自由度工业机器人。
4.根据权利要求1所述的一种复杂构件力学性能的微磁无损自动检测装置,其特征在于,所述工作台(5)固定于地基上。
技术总结
本技术公开了一种复杂构件力学性能的微磁无损自动检测装置,包括:主控计算机、微磁检测仪、自动扫查机构、机器视觉单元、工作台和视觉校准板,其中微磁检测仪包括:微磁检测仪主机和微磁传感器,微磁检测仪主机分别与微磁传感器、机器人控制器以及主控计算机相连;自动扫查机构包括:机器人本体、机器人控制器和夹持装置;机器视觉单元包括:智能相机和数据转换单元;视觉校准板设置于工作台的台面上,待测构件设置于工作台的台面上方;视觉校准板和待测构件均位于智能相机的正下方。本技术实现构件力学性能和残余应力的自动化无损检测,提高了工作效率和自动化程度。
技术研发人员:董海江,王贺,肖婷,许庆瑜,李杨,赵春雷
受保护的技术使用者:国合通用测试评价认证股份公司
技术研发日:20230505
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!