一种单线激光雷达的制作方法
本技术涉及激光雷达,特别是涉及一种单线激光雷达。
背景技术:
1、激光雷达作为一种新型的距离测量手段,具有测量速度快、获取的数据精度高、实时性强等优点,激光雷达按照线束数量可分为单线激光雷达和多线激光雷达,单线激光雷达是目前成本最低的激光雷达,因此单线激光雷达应用性也较好,被广泛用于移动机器人自主导航的领域。这种单线激光的工作原理是发射一束激光,经过光学镜片的汇聚和反射,照射在目标处,经过目标反射的光也同样通过光学镜片的反射和汇聚,到达探测器中的光电感应的位置,经过光电转换,计算发射出去的发射光和接收目标反射回来的光之间的时间差,根据时间差计算目标的距离,再结合各种扫描机构以及测量出来的角度数据,就可以得到激光雷达所探测的目标的距离和方位数据。
2、扫描机构在绕中心轴旋转时,需要获知光线出射的方位角信息,一般性的,单线激光雷达采用光电编码器配合码盘结构来进行角度信息的测量。如在公开号为cn209342906u,名称为《自动驾驶系统、激光雷达及其转动角度检测控制结构》专利中,公开了一种转动角度检测控制结构。在公开号cn111398981a,名称为《一种圆光栅角度测量装置及测量方法、激光扫描仪》专利中,对此类圆光栅角度测量装置及测量方法进行了公开。但上述方案均没有考虑实际应用中环境光对光电编码器的影响,当有较强的光线直接照射光电编码器接收区,会导致接收致盲,则角度测量信息出现异常,从而导致激光雷达无法正常工作,因此需对现有技术方案进行改进。
技术实现思路
1、基于此,本实用新型提供一种单线激光雷达,通过码盘体结构的优化以及结构之间的相互关联和遮挡形成的光线隔离结构降低了环境光对角度测量单元的影响,提高激光雷达的抗环境光干扰的能力。
2、为实现上述实用新型目的,本实用新型采用下述技术方案予以实现:
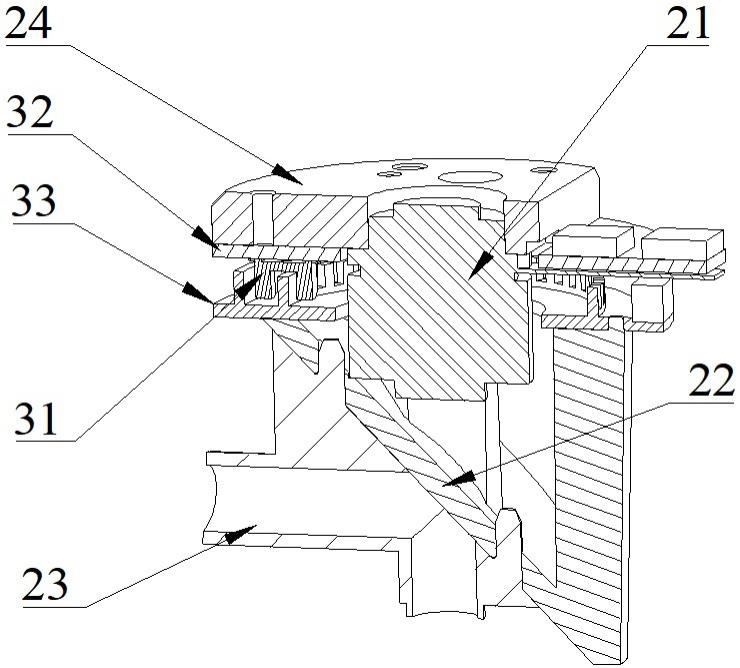
3、一种单线激光雷达,包括外壳、设置于外壳内的激光测距单元、扫描单元和角度测量单元;所述扫描单元包括电机固定座、固定于电机固定座上的电机、通过电机驱动旋转的反射部件;所述角度测量单元包括:
4、角度测量电路板,固定于所述电机固定座上;
5、光电编码器,固定于所述角度测量电路板远离电机固定座的侧面上;
6、码盘体,位于所述光电编码器远离角度测量电路板的一侧,包括同心设置的竖向码盘、第一遮光环、第二遮光环;
7、所述第一遮光环为平面圆环结构,其套设于所述电机的外侧,与所述反射部件的旋转轴线同轴设置,所述第一遮光环与所述反射部件固定连接;
8、所述竖向码盘为筒状结构,设置于所述第一遮光环上,其顶部具有与所述光电编码器配合的齿槽结构;
9、所述第二遮光环为筒状结构,设置于所述第一遮光环上,位于所述竖向码盘的外侧,其高度高于所述光电编码器的收发光路中心。
10、在其中一些实施例中,所述第一遮光环的内环边沿与所述电机的外壳体之间的间隙≤2mm和/或所述第一遮光环的外环边沿与所述外壳之间的间隙≤2mm。
11、在其中一些实施例中,所述角度测量电路板的外边沿位于所述第二遮光环的外侧,所述第二遮光环的顶边沿与所述角度测量电路板之间的间隙≤2mm;或者所述角度测量电路板的外边沿位于所述第二遮光环的内侧,所述第二遮光环的顶边沿与所述电机固定座之间的间隙≤2mm。
12、在其中一些实施例中,所述第二遮光环的内侧面与所述光电编码器之间的间隙≤2mm。
13、在其中一些实施例中,所述码盘体还包括第三遮光环,所述第三遮光环设置于所述第一遮光环上,位于所述竖向码盘的内侧,其高度高于所述光电编码器的收发光路中心。
14、在其中一些实施例中,所述第一遮光环垂直于所述旋转轴线设置;所述竖向码盘和第二遮光环垂直于所述第一遮光环设置。
15、在其中一些实施例中,所述码盘体采用不透光材料一体注塑成型。
16、在其中一些实施例中,所述码盘体与所述反射部件为一体注塑结构,所述反射部件的表面设置用于反射光线的反射层。
17、在其中一些实施例中,所述反射层为金属膜,所述金属膜层镀设于所述反射部件上。
18、在其中一些实施例中,所述外壳包括下壳体和与下壳体连接的光学外罩,所述光学外罩罩设于所述扫描单元和角度测量单元的外侧。
19、在其中一些实施例中,所述光学外罩采用磨砂处理或者所述光学外罩内设置有遮光部件。
20、与现有技术相比,本实用新型的优点和积极效果是:
21、上述单线激光雷达,通过码盘体结构的优化以及结构之间的相互关联和遮挡形成的光线隔离结构,对光电编码器和码盘体的工作区域的底部、顶部、内侧和外侧分别进行了遮挡,削弱了环境光对角度测量单元的影响,提高了激光雷达的抗环境光干扰的能力,提高了激光雷达的工作稳定性;同时,本实用新型的单线激光雷达充分利用现有结构,通过对码盘体结构的优化,在不增加零部件基础上实现了光线隔离结构的搭建,成本较低。
22、结合附图阅读本实用新型的具体实施方式后,本实用新型的其他特点和优点将变得更加清楚。
技术特征:
1.一种单线激光雷达,包括外壳、设置于外壳内的激光测距单元、扫描单元和角度测量单元;所述扫描单元包括电机固定座、固定于电机固定座上的电机、通过电机驱动旋转的反射部件;其特征在于,所述角度测量单元包括:
2.根据权利要求1所述的单线激光雷达,其特征在于,所述第一遮光环的内环边沿与所述电机的外壳体之间的间隙≤2mm和/或所述第一遮光环的外环边沿与所述外壳之间的间隙≤2mm。
3.根据权利要求1所述的单线激光雷达,其特征在于,所述角度测量电路板的外边沿位于所述第二遮光环的外侧,所述第二遮光环的顶边沿与所述角度测量电路板之间的间隙≤2mm;或者所述角度测量电路板的外边沿位于所述第二遮光环的内侧,所述第二遮光环的顶边沿与所述电机固定座之间的间隙≤2mm。
4.根据权利要求1所述的单线激光雷达,其特征在于,所述第二遮光环的内侧面与所述光电编码器之间的间隙≤2mm。
5.根据权利要求1所述的单线激光雷达,其特征在于,所述码盘体还包括第三遮光环,所述第三遮光环设置于所述第一遮光环上,位于所述竖向码盘的内侧,其高度高于所述光电编码器的收发光路中心。
6.根据权利要求1所述的单线激光雷达,其特征在于,所述第一遮光环垂直于所述旋转轴线设置;所述竖向码盘和第二遮光环垂直于所述第一遮光环设置。
7.根据权利要求1所述的单线激光雷达,其特征在于,所述码盘体采用不透光材料一体注塑成型。
8.根据权利要求1所述的单线激光雷达,其特征在于,所述码盘体与所述反射部件为一体注塑结构,所述反射部件的表面设置用于反射光线的反射层。
9.根据权利要求8所述的单线激光雷达,其特征在于,所述反射层为金属膜,所述金属膜层镀设于所述反射部件上。
10.根据权利要求1-9任意一项所述的单线激光雷达,其特征在于,所述外壳包括下壳体和与下壳体连接的光学外罩,所述光学外罩罩设于所述扫描单元和角度测量单元的外侧。
技术总结
本技术涉及激光雷达技术领域,公开了一种单线激光雷达,包括外壳、激光测距单元、扫描单元和角度测量单元;扫描单元包括电机固定座、电机和反射部件;角度测量单元包括角度测量电路板、光电编码器和码盘体,码盘体包括竖向码盘、第一遮光环、第二遮光环;第一遮光环为平面圆环结构,其套设于电机的外侧,并与反射部件固定连接;竖向码盘为筒状结构,设置于第一遮光环上,其顶部具有齿槽结构;第二遮光环为筒状结构,位于竖向码盘的外侧,其高度高于光电编码器的收发光路中心。上述单线激光雷达,通过码盘体结构的优化以及结构之间的相互关联和遮挡形成的光线隔离结构降低了环境光对角度测量单元的影响,提高激光雷达的抗环境光干扰的能力。
技术研发人员:王艳
受保护的技术使用者:骑鲸瞰海(杭州)科技有限公司
技术研发日:20230505
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!