足底传感装置及足式机器人的制作方法
本公开涉及机器人传感器,尤其涉及一种足底传感装置及足式机器人。
背景技术:
1、机器人的足底传感器主要用于测量足底与地面的接触状态和接触力,用于机器人状态估计器中的传感器融合,对于非周期步态时和崎岖路面行走时的状态估计至关重要。又由于机器人行走时需要反复与地面撞击,所处工况较为恶劣,因此也对传感器的可靠性提出了要求。
技术实现思路
1、本公开提出一种足底传感装置及足式机器人,以解决相关技术中的至少部分问题。
2、第一方面,本公开实施例提出一种足底传感装置,包括:
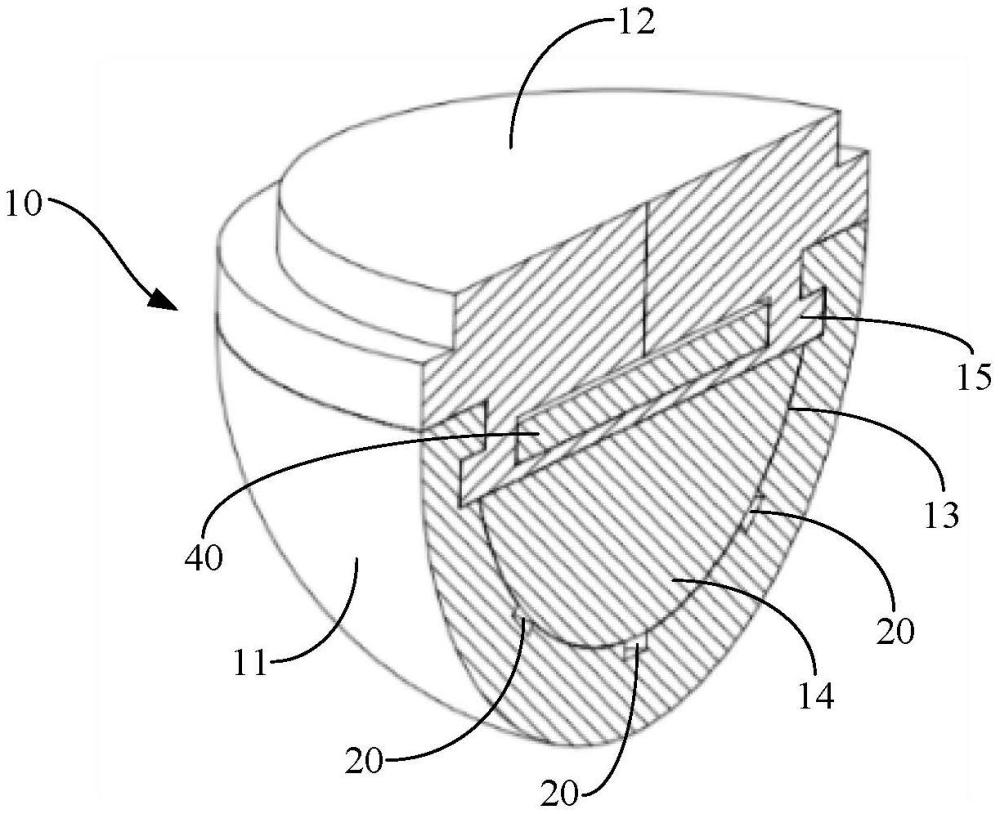
3、主体,包括受力部;所述主体还包括连接部,所述连接部的底部形成有罩体,所述罩体与所述连接部之间围合形成有空腔部;所述受力部连接于所述连接部的底部,并包覆于所述罩体的外部;
4、多个磁铁,分布设置于所述受力部;多个所述磁铁分布设置于所述受力部和所述罩体之间;
5、磁传感器,设于所述主体内,用于检测所述磁铁的磁场变化。
6、可选的,所述罩体呈半球状,所述受力部呈半球状;多个所述磁铁分布设置于所述受力部和所述罩体之间的半球形空间内。
7、可选的,所述受力部具有凹腔,所述连接部的底部和所述罩体嵌设于所述凹腔内;所述连接部的底部的侧壁形成有凹陷和凸起中的一者,所述凹腔的内壁对应形成有凹陷和凸起中的另一者,所述凸起固定于所述凹陷内。
8、可选的,所述空腔部内填充有填充材料。
9、可选的,还包括电路板,设于所述主体内,所述磁传感器设于所述电路板上,并朝向所述磁铁。
10、可选的,所述磁传感器的数量为多个,呈阵列设置于所述电路板上。
11、可选的,所述受力部呈半球状,多个所述磁铁根据所述受力部的外轮廓球面均匀分布;
12、多个所述磁传感器呈圆形阵列排布,所述圆形阵列的中轴线经过所述受力部的球心。
13、可选的,所述主体内形成有容纳腔,所述电路板设置于所述容纳腔内。
14、可选的,所述受力部为橡胶部。
15、第二方面,本公开实施例提出一种足式机器人,包括机器人本体和如第一方面所述的足底传感装置,所述机器人本体包括腿部组件,所述腿部组件与所述足底传感装置的连接部连接。
16、本公开的实施例提供的技术方案可以包括以下有益效果:
17、本公开的足底传感装置,通过磁传感器测量磁铁的磁场变化,从而获取由于足底形变导致的足底内磁场分布的变化,通过计算得到足底的接触状态,行走时检测足底的形变,从而判断足底的接触状态。这些状态和变量可以被传入状态估计器中用于机器人运动学和惯性传感器的融合滤波,得到一个更为精确的机器人运动状态。此外,采用磁铁和磁传感器的测量方式,由于测量的是磁场,对环境的温度、压力不敏感,因此较适合足底这种工况恶劣的场合。
18、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
技术特征:
1.一种足底传感装置,其特征在于,包括:
2.根据权利要求1所述的足底传感装置,其特征在于,所述罩体呈半球状,所述受力部呈半球状;多个所述磁铁分布设置于所述受力部和所述罩体之间的半球形空间内。
3.根据权利要求1所述的足底传感装置,其特征在于,所述受力部具有凹腔,所述连接部的底部和所述罩体嵌设于所述凹腔内;所述连接部的底部的侧壁形成有凹陷和凸起中的一者,所述凹腔的内壁对应形成有凹陷和凸起中的另一者,所述凸起固定于所述凹陷内。
4.根据权利要求1所述的足底传感装置,其特征在于,所述空腔部内填充有填充材料。
5.根据权利要求1所述的足底传感装置,其特征在于,还包括电路板,设于所述主体内,所述磁传感器设于所述电路板上,并朝向所述磁铁。
6.根据权利要求5所述的足底传感装置,其特征在于,所述磁传感器的数量为多个,呈阵列设置于所述电路板上。
7.根据权利要求6所述的足底传感装置,其特征在于,所述受力部呈半球状,多个所述磁铁根据所述受力部的外轮廓球面均匀分布;
8.根据权利要求5所述的足底传感装置,其特征在于,所述主体内形成有容纳腔,所述电路板设置于所述容纳腔内。
9.根据权利要求1所述的足底传感装置,其特征在于,所述受力部为橡胶部。
10.一种足式机器人,其特征在于,包括机器人本体和如权利要求1-9中任一项所述的足底传感装置;
技术总结
本公开是关于一种足底传感装置及足式机器人。足底传感装置包括:主体,包括受力部。多个磁铁,分布设置于所述受力部。磁传感器,设于所述主体内,用于检测所述磁铁的磁场变化。通过磁传感器测量磁铁的磁场变化,从而获取由于足底形变导致的足底内磁场分布的变化,通过计算得到足底的接触状态,行走时检测足底的形变,从而判断足底的接触状态。这些状态和变量可以被传入状态估计器中用于机器人运动学和惯性传感器的融合滤波,得到一个更为精确的机器人运动状态。此外,采用磁铁和磁传感器的测量方式,由于测量的是磁场,对环境的温度、压力不敏感,因此较适合足底这种工况恶劣的场合。
技术研发人员:杨逸初
受保护的技术使用者:北京小米机器人技术有限公司
技术研发日:20230525
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!