适用于机器视觉变形监测的复合观测墩结构的制作方法
本技术涉及水利水电工程安全监测的标石结构,主要应用于建筑物的变形监测,尤其适用采用机器视觉测量系统进行变形监测的水利工程项目。
背景技术:
1、水利工程运行期的建筑物需要依据其级别对它的水平位移(上、下游方向的变形)、竖向位移(建筑物的沉降)进行满足规定精度要求的变形监测。竖向位移监测一般都采用水准测量,而更为复杂的水平位移监测则需要由校核基点、工作基点和测点构成的监测体系,配合多种方法实施监测,常用的有准直线法(视准线法、引张线法或激光准直法)、交会法、极坐标法和gnss法。但这些方法在布置或使用中会遇到以下主要问题:
2、1、有些工程两岸通视条件不佳,监测视线或引张线布置受障碍物阻挡,不能满足准直线法监测的实施条件;
3、2、当水利工程位于深厚软土场地上时,一般采用倒垂仪作为校核基点,而且要求它的保护套管必须深入基岩。但在软土层中造深孔时,孔的垂直度容易发生偏差,限制了倒垂仪的测量精度,导致引张线、激光准直设备缺少稳定可靠的校核基点;
4、3、交会法一般需要人工监测,技术要求高,工作量大,观测频率较低,一般用于校核观测。若要求实现常态化的自动测量必须配置多台自动全站仪,设备成本高,并不经济;
5、4、极坐标法和gnss法测量精度只能达到1cm左右,没有达到一、二级建筑物的变形监测0.1mm的精度要求,目前只能用于三级以下的建筑物。
6、近年来,随着图像识别和边缘计算技术的发展,机器视觉测量系统因具有监测精度高、自动化程度高和人工成本低廉的优势,已经在水利工程中开展监测应用。该新型测量系统由背光靶标和机器视觉测量仪组成,其测量原理如下:通过机器视觉测量仪上的摄像头获取安装在被测物体上的靶标图像,经内置的图像增强边缘计算软件将图像转化为二维数据,通过监测每一帧图像中靶标中心象素坐标的变化,从而实现被测物体的水平与竖向位移的连续测量。上述测量原理表明,机器视觉测量的是靶标中心相对于第一帧图像中初始位置的相对位移,并不能直接获得靶标中心的绝对位移。所以测量系统一旦调整靶标角度或更换观测设备,靶标中心的图像位置发生突变,测点的变形测值序列就会发生中断。另一方面,机器视觉测量仪测量成果虽然自动化程度高,但也需要定期采用其他监测方法进行复核,以保证测量成果的可靠性。
7、为了保证日常监测和复核工作的实施,所以水利工程的变形监测体系分为校核基点、工作基点和测点三级。校核基点通常位于建筑物影响范围以外的观测墩上,用于安装校核仪器复核工作基点的变形。工作基点通常位于建筑物附近的观测墩上,用于安装监测仪器测量建筑物上各测点的变形。测点位于被建筑物的观测墩上,用于安装观测靶标,提供监测目标。
8、现行安全监测设计规范中推荐的标准观测墩结构,其顶部通常设置强制对中盘,它只能提供一个安装观测仪器或观测靶标的水平安装孔。监测人员根据不同的观测需求临时拆装或替换设备。而机器视觉测量系统需要保持测量序列的稳定,应尽可能避免拆装靶标。因此需要设计适用于机器视觉变形监测的复合观测墩结构,特别是工作基点观测墩和测点观测墩,它们的顶部需要有两个同轴的强制对中基座,可以安装两种不同的观测设备进行自动的监测和复核。同时复合观测墩结构还要增加电缆通道,满足设备的供电或通信要求。
技术实现思路
1、为了克服现有结构中存在的技术缺陷,满足机器视觉测量系统供电通信、连续稳定监测和定期复核的需求,本实用新型提供适用于机器视觉变形监测的复合观测墩结构,利用同轴双层强制对中基座,可以同时提供背光靶标和反射棱镜安装位置,从而保证监测的准确性和可靠性。
2、本实用新型采用的技术方案为:
3、适用于机器视觉变形监测的复合观测墩结构,包括三种用途和位置不同的观测墩:校核基点观测墩、工作基点观测墩和测点观测墩。所述校核基点观测墩,需要布置在建筑物影响区以外且能互相通视的两个位置,用于定期测量所述工作基点观测墩和各测点观测墩的绝对位移。所述工作基点观测墩,布置在监测建筑物附近的场地上,用于日常测量各测点观测墩的变形。所述测点观测墩,安装在监测建筑物之上,与建筑物上各测点观测墩之间均有良好的通视条件,保持观测光路畅通,用于安装变形观测所用的反射棱镜或背光靶标。所述校核基点观测墩,其结构包括钢筋混凝土灌注桩、承台、校核基点墩柱、强制对中基座、沉降基准点和全站仪。所述承台位于钢筋混凝土灌注桩的顶部,作为校核基点墩柱的基础,减少变形和沉降。所述沉降基准点位于承台上,作为沉降监测的基准高程,校核所述工作基点观测墩的高程。所述校核基点墩柱的顶部高出地面,顶部安装强制对中基座,并与其它校核基点观测墩,工作基点观测墩、建筑物上各测点观测墩之间均有良好的通视条件,保持校核光路畅通。
4、所述工作基点观测墩,包括钢筋混凝土灌注桩、承台、工作基点墩柱、沉降观测点、双层强制对中基座、机器视觉测量仪、反射棱镜和预埋电缆管。所述承台位于钢筋混凝土灌注桩的顶部作为工作基点墩柱的基础,减少变形和沉降。所述沉降观测点位于承台上,作为沉降监测的起测高程,测量各测点观测墩的高程。所述工作基点墩柱高出地面,顶部安装所述双层强制,双层强制对中基座的下层基座安装所述反射棱镜,用于校核所述工作基点观测墩的位置;双层强制对中基座的上层基座安装所述机器视觉测量仪,用于监测测点的变形。所述预埋电缆管埋于所述工作基点墩柱中,用于向机器视觉测量仪供电和传递监测信息。
5、所述测点观测墩,包括测点墩柱、沉降观测点、双层强制对中基座、反射棱镜、背光靶标及预埋电缆管。所述沉降观测点位于监测建筑物上紧靠测点观测墩布置,用于测量测点观测墩的高程。所述测点墩柱高出地面,顶部安装所述双层强制对中基座,并与所述工作基点观测墩之间没有障碍物阻挡,有良好的通视条件。所述双层强制对中基座的下层基座安装所述反射棱镜,用于人工测量所述测点观测墩的绝对位移;双层强制对中基座的上层基座安装所述背光靶标,用于监测所述测点观测墩的相对位移。所述预埋电缆管埋于所述测点墩柱中,用于向背光靶标供电。
6、进一步地,所述双层强制对中基座,包括上、下两层强制对中基座、三根带有竖直微调器的锚筋和三根带有竖直微调器的支撑螺杆。所述强制对中基座利用三槽定位的原理,为机器视觉测量仪、反射棱镜和背光靶标提供强制归心的连接。所述带有竖直微调器的锚筋,位于所述强制对中基座的底层基座以下,用于所述工作基点墩柱或测点墩柱浇筑过程中保证下层基座的强制对中基座水平,相邻锚筋间的夹角为120度。所述带竖直微调的支撑螺杆,位于所述双层强制对中基座的两层基座之间,用于将双层强制对中基座的上层基座调节水平,相邻支撑螺杆间的夹角为120度。
7、进一步地,所述钢筋混凝土灌注桩采用桩径大于80cm的嵌岩桩。
8、进一步地,所述工作基点墩柱高出地面1.2m~1.3m。
9、进一步地,所述测点墩柱距周围的结构物1m以外,高出地面1.2m~1.3m。
10、本实用新型的校核基点观测墩采用普通的观测墩结构,其顶部只需提供一个强制对中基座用于安装全站仪进行工作基点和测点的人工复核观测;而工作基点观测墩和测点观测墩顶部需要安装同轴的双层强制对中基座,可以同时提供机器视觉测量仪、背光靶标和反射棱镜的安装位置,从而实现变形监测的各种要求。
11、利用本实用新型复合观测墩结构的监测方法,包括以下步骤:
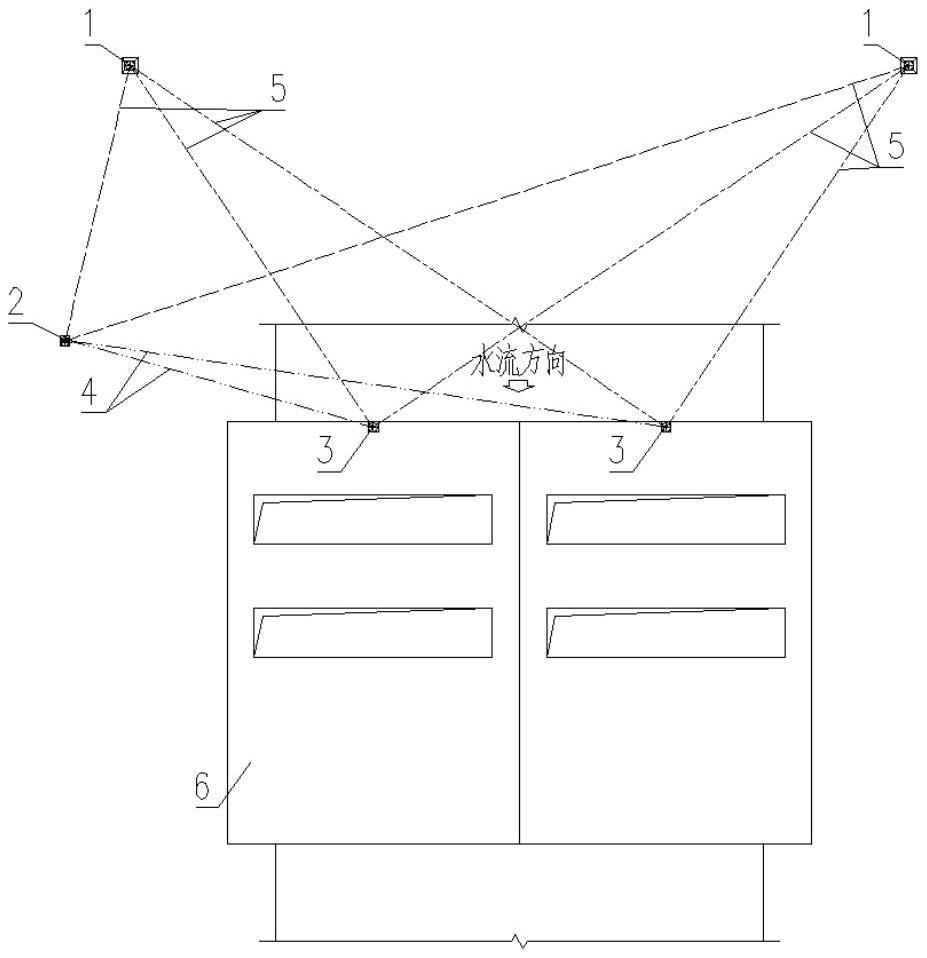
12、s1、建立包括监测建筑物、工作基点观测墩和测点观测墩的直角坐标系,原点可选在一个校核基点观测墩的中心。x轴一般垂直于监测建筑物的轴线并指向下游,y轴沿监测建筑物轴线方向,竖向为z轴,三个轴的正方向呈右手系。∠a为x轴与水流上下游方向的夹角,为便于计算一般控制夹角为0度。
13、s2、测量初始值;
14、在水利工程通水前,在两个校核基点观测墩上分别架设全站仪,观测测点观测墩上的反射棱镜,测得各测点的原始坐标ci0(xi0,yi0),其中i=1,2,3,...,n表示测点编号,采用水准测量测得测点的原始高程hi0;观测工作基点观测墩上的反射棱镜,测得工作基点的初始坐标s0(x0,y0),采用水准测量测得工作基点的初始高程h0;
15、s3、校核监测;
16、校核监测的频率为每月一次,可根据需要增加观测次数,一般采用人工观测方法,主要包括以下两项工作:
17、1)测量本月各测点观测墩水平位移和沉降累计值。
18、在校核基点观测墩上分别架设全站仪,观测测点观测墩上的反射棱镜,测得本月各测点的坐标c′i0(x′i0,y′i0),并计算水平变形累计值采用水准测量测得测点高程h′i0,并计算的沉降累计值δhi=h′i0-hi0;复核后,调整背光靶标使其的中心位置读数归零。
19、2)校核工作基点观测墩变形量。
20、在两个校核基点观测墩上分别架设全站仪,人工观测工作基点观测墩上的反射棱镜,采用交会法测得工作基点观测墩的坐标s1(x1,y1),采用水准测量测得工作基点高程h1,与上月工作基点的坐标s′1(x′1,y′1)和高程h′1相比,计算本月工作基点顺水流上下游方向的位移和沉降δh=h1-h′1。
21、s4、监测每天测点变形;
22、工作基点观测墩上的机器视觉测量仪每天定时监测各测点的相对水平和竖向变形量,校核后第i个测点第j天的测值为δpij(δdij,δzij),δdij表示位移,δzij表示沉降,得到各测点的水平位移值c′ij=δci+δdij和沉降值h′ij=δhi+δzij。
23、s5、修正变形测量数据;
24、当工作基点观测墩完成下一次校核后,按以下公式对上次校核后测点每天的水平位移值c′ij和沉降值h′ij进行修正,得到最终变形值:
25、cij=c′ij+j×δs/nd
26、hij=h′ij+j×δh/nd
27、nd表示相邻两次校核之间的间隔天数。
28、本实用新型的有益效果为:
29、1、复合观测墩结构改进了传统混凝土观测墩只能安装一个对中设备的限制,通过双层强制对中基座,安装两个同轴的观测设备,背光靶标供机器视觉测量系统进行自动监测;反射棱镜可以进行视准线或交会法的光学测量。
30、2、采用全站仪观测各反射棱镜可以得到各测点观测墩的初始位置,配合机器视觉测量仪与背光靶标测得的实时相对变形,可以得到各测点的准确位置连续变化,弥补了机器视觉测量仪只能测量被测建筑物相对变形的缺陷。
31、3、当更换机器视觉测量仪或背光靶标后,可以通过复核测点的真实位置后延续前期的观测值序列,保证安全监测的连续性,解决了测值序列无法接续的问题。
32、4、机器视觉测量仪需要电源供电和信号对外传输通道,复合观测墩增加预埋电缆管,提供了监测电源和信号通道。
- 还没有人留言评论。精彩留言会获得点赞!