大载荷氢动力无人机载瞬变电磁探测系统
本技术涉及地球物理勘探或地质探测,特别是涉及一种大载荷氢动力无人机载瞬变电磁探测系统。
背景技术:
1、全航空瞬变电磁具有分辨率高、探测深度大、效率高等特点,在浅层精细化快速探测方面具有显著优势,而无人机相较于有人直升机又具有超低空、低速、成本低、操作简单、智能化等优势,特别是降低了复杂地形、极端环境、高海拔等特殊重点工区的飞行施工安全风险,为资源勘查、减灾防灾、环境监测等提供了极佳的发展平台。作为一种新近阶段蓬勃发展的电磁探测手段,无人机载瞬变电磁探测系统在岩溶、煤矿采空区、未爆弹探测,大坝渗漏检测,地下水系调查,抽蓄选址,水库选址等多种领域应用前景广阔。
2、目前,无人机全航空电磁探测装置的设计中多采用锂电池或油电混动式子系统进行供电,锂电或油电系统的输出能力极其稳定性受环境温度和海拔高度等影响巨大,难以在极端气温环境和高海拔地区维持正常输出;现有装置对于瞬变电磁发射子系统用电和无人机电机驱动用电采用分离供电的方式,因此需要多组锂电池串并联以保证电压电流输出,因此整机能量密度难以大幅提高;进一步地,由于供电电源能量密度低,导致无人机续航时间短、载荷小,且电源功率与飞行功率、发射功率之间的适配问题导致全航空瞬变探测系统的重量和体积难以压缩,系统轻量化瓶颈问题难以解决。以上限制条件和矛盾点使得目前已有的无人机全航空瞬变电磁探测系统无法保证工程应用所必需的轻量化条件,难以开展长航时、宽范围、较大深度的高效勘查。
3、申请号cn115755190a,发明名称:无人机三分量全航空瞬变电磁探测系统及方法,包括空中探测系统和地面辅助系统,其中,空中探测系统包括无人机、接收装置、发射装置和连接装置。发射装置包括发射子装置、发射线圈和补偿线圈;接收装置包括接收子装置和三分量磁传感器;连接装置包括信号与绳索复合缆,用于连接无人机、发射装置和接收装置;其中,三分量磁传感器用于获取三分量电磁数据,补偿线圈设置在发射线圈的内侧,且发射线圈与补偿线圈的线圈绕制方式使流经发射线圈的电流方向与补偿线圈的电流方向相反,降低了发射装置对接收装置的电磁场干扰。该专利使用三分量磁传感器进行数据采集,使用补偿结构消除线圈耦合,未提及以长航时、宽范围、较大深度的绿色高效勘查为目的的新型供电模式下无人机载瞬变电磁探测系统设计与应用。
4、现有技术的缺点:所采用的能量供给方式和分配模式难以满足无人机载瞬变电磁探测系统轻量化生产、长航时作业和低碳施工的需求。
技术实现思路
1、本实用新型提供一种大载荷氢动力无人机载瞬变电磁探测系统,实现了无人机载瞬变电磁探测系统的轻量化生产、长航时作业和低碳绿色勘查。
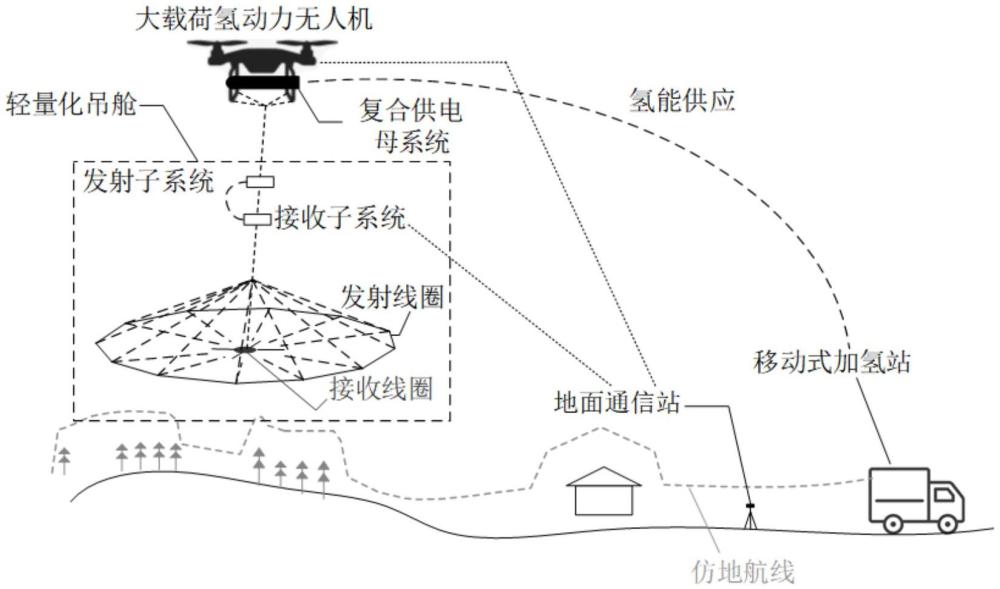
2、为达到上述目的,本实用新型提供一种大载荷氢动力无人机载瞬变电磁探测系统,包括空中主作业装置和地面辅助装置,其关键是:所述空中主作业装置包括大载荷氢动力无人机、复合供电母系统和轻量化吊舱,所述复合供电母系统装载于所述大载荷氢动力无人机上,为所述大载荷氢动力无人机和轻量化吊舱供电,所述轻量化吊舱通过固定组件安装于所述大载荷氢动力无人机下部;
3、所述地面辅助装置包括地面通信站和移动式加氢站,所述地面通信站与所述大载荷氢动力无人机和轻量化吊舱无线通信连接,所述移动式加氢站为无人机储氢罐提供氢气,该无人机储氢罐装载于所述大载荷氢动力无人机上。
4、通过上述设计,所述大载荷氢动力无人机为所述复合供电母系统和轻量化吊舱的装载运输工具,该大载荷氢动力无人机以高能量密度的氢燃料电池为能量源;所述氢燃料电池一方面能在-30℃的环境温度下实现冷启动,在60℃的高温环境中仍能正常工作,拥有良好的温度特性;另一方面在高海拔地区,含氧量的降低对氢燃料电池系统的输出性能影响极其微小,该氢燃料电池系统在高海拔地区只会出现输出性能下降,而不会出现内燃机式的无动力输出;因此将大载荷氢动力无人机作为大载荷氢动力无人机载瞬变电磁探测系统的搭载工具能够同时克服极端气温、高海拔等恶劣环境对飞行勘查造成的不利影响。
5、所述地面通信站传输控制指令给所述空中主作业装置,实现了地面通信站对所述大载荷氢动力无人机的飞行任务控制和对所述轻量化吊舱中的瞬变电磁探测子系统的瞬变电磁探测任务的精准控制;该地面通信站还实时监测并回传显示大载荷氢动力无人机的飞行数据和轻量化吊舱的瞬变电磁探测数据,实现对空中主作业装置的实时控制与动态信息监测,保证瞬变电磁探测任务的安全和高效实施。
6、所述移动式加氢站为“制氢-储氢-加氢”一站式小型高集成度能源制备、存储和供应子系统,该移动式加氢站用于空中主作业装置单航次飞行探测任务结束后,将氢气充进大载荷氢动力无人机内部储氢罐中;该移动式加氢站在常规时间内则通过电解、氢氧分离、氢气压缩存储等过程制备和保存空中主作业装置多航次任务所需氢能,为所述大载荷氢动力无人机载瞬变电磁探测系统快速高效地开展大规模扫面作业提供能源保证。
7、所述移动式加氢站采用小型货运卡车集成,输入市电或发电机供电,加注接口与无人机储氢罐接口适配,满足灵活供氢需求,可野外现场完成氢能“制-储-加-用”过程。所述移动式加氢站通过轻量化的结构设计和系统集成以及标准化的作业流程设计,满足移动式、非固定场景及野外场所的氢能高效即制即用和灵活供给功能,实现大载荷氢动力无人机和瞬变电磁探测子系统的氢能持续可靠供应。
8、作为优选:所述轻量化吊舱内设置有瞬变电磁探测子系统,该瞬变电磁探测子系统包括发射线圈和接收线圈,所述发射线圈通过n根长度一致的吊绳悬吊于所述大载荷氢动力无人机下方;所述接收线圈通过m根长度一致的吊绳悬吊于所述大载荷氢动力无人机下方,该接收线圈与所述发射线圈位于同一水平面,且中心点一致;
9、所述瞬变电磁探测子系统还包括瞬变发射子系统和接收子系统,所述瞬变发射子系统通过开关电路发送电流脉冲给所述发射线圈,该发射线圈在接受到电流脉冲后,产生一次磁场并使其从空中垂直向下传播至地层;所述接收线圈用于接收来自地下的二次磁场信号,并将所述二次磁场信号转变为感应电压信号;所述接收子系统与所述接收线圈连接通信。
10、通过上述设计,所述瞬变电磁探测子系统实现了电流脉冲的重复发送以及二次磁场感应电压信号的采集、传输和存储。
11、所述瞬变发射子系统通过开关电路向发射线圈重复发送特定波形和一定幅值的电流脉冲;所述发射线圈在流过电流发生变化的时间段内产生一次磁场并使其从空中垂直向下传播至地层;所述接收线圈用于接收地下磁场的变化即二次磁场信号,并将该二次磁场信号转变为感应电压信号;所述接收子系统通过信号放大、滤波、ad采样等过程采集、传输和存储所述感应电压信号,并将该感应电压信号用于后续的数据处理及反演过程。
12、作为优选:所述复合供电母系统包括主供电模块、第一辅助供电模块和第二辅助供电模块;
13、所述主供电模块由氢燃料电池和单向dc/dc变换器1组成,所述氢燃料电池为所述单向dc/dc变换器1的输入端充电,该单向dc/dc变换器1的输出端经供电母线与所述大载荷氢动力无人机和瞬变电磁探测子系统的直流输入端连接;
14、所述第一辅助供电模块由超级电容器和双向dc/dc变换器2组成,所述超级电容器与所述双向dc/dc变换器2的输入端双向连接,该双向dc/dc变换器2的输出端经供电母线与所述大载荷氢动力无人机和瞬变电磁探测子系统的直流输入端连接;
15、所述第二辅助供电模块由锂电池和双向dc/dc变换器3组成,该所述锂电池与所述双向dc/dc变换器3的输入端双向连接,该双向dc/dc变换器3的输出端经供电母线与所述大载荷氢动力无人机和瞬变电磁探测子系统的直流输入端连接;
16、所述单向dc/dc变换器1还通过双向dc/dc变换器2为所述超级电容器反向充电,所述单向dc/dc变换器1还通过双向dc/dc变换器3为所述锂电池反向充电。
17、通过上述设计,所述复合供电母系统以氢燃料电池为主能量源,超级电容器和锂电池为辅助能量源,三者相互弥补特性劣势,以保护各能量源安全运行,提升供电系统经济性。
18、所述主供电模块用于提供氢能向电能转变的单向能量通路;所述第一辅助供电模块利用超级电容器较大的功率密度和较宽的工作温度范围来维持大电流输出工况下的母线电压稳定,同时通过能量回馈保持超级电容器两端的电压在相对稳定水平;所述第二辅助供电模块以锂电池的瞬时大电流输出能力补偿燃料电池动态响应差的缺陷,为所述大载荷氢动力无人机载瞬变电磁探测系统阶段性大电流输出场景提供辅助性能源供给,保证能量流动平衡,防止燃料电池电压发生骤跌。
19、作为优选:所述复合供电母系统还包括能量传输控制器,该能量传输控制器发送控制指令给所述单向dc/dc变换器1、双向dc/dc变换器2和双向dc/dc变换器3,所述大载荷氢动力无人机和瞬变电磁探测子系统发送反馈信息给所述能量传输控制器。
20、通过上述设计,所述能量传输控制器作为所述大载荷氢动力无人机载瞬变电磁探测系统主要的能量管理子装置,在大载荷氢动力无人机载瞬变电磁探测系统开展飞行施工时,向单向dc/dc变换器1、双向dc/dc变换器2、双向dc/dc变换器3发送控制指令,协调三者的能量传输方向和供电分配比例,维持全系统功率动态平衡。
21、所述能量传输控制器根据大载荷氢动力无人机的运行阶段、飞行状态以及瞬变电磁探测子系统的电流脉冲输出时序,建立三个dc/dc变换器轻载输出和重载输出的供电区间,充分利用氢燃料电池、超级电容器和锂电池三者不同的供能特性,为大载荷氢动力无人机和瞬变电磁探测子系统提供能量保证。
22、所述大载荷氢动力无人机的控制电路和驱动电机是其主要用电装置,所述瞬变电磁探测子系统的发射电路是其主要用电装置,所述复合供电母系统设置有四种模式:
23、模式一:由于大载荷氢动力无人机处于启动、上升和加速状态下电机转速加快,所需瞬时电流快速增大,为防止因过载引起的燃料电池电压骤跌,所述能量传输控制器根据反馈的电流信息调节能量传输比例,使此阶段系统运行的主要能量来源是第二辅助供电模块,同时启动功率限幅环节,控制燃料电池的能量输出上限,超级电容器作为小占比能量源用以维持供电母线电压稳定,单向dc/dc变换器1和双向dc/dc变换器2为此阶段的辅助功率供给装置;
24、模式二:所述大载荷氢动力无人机匀速飞行同时瞬变发射子系统输入电流处于停供时段时,氢燃料电池能够维持系统电流稳定输出,所述能量传输控制器根据反馈的电流信息调节能量传输比例,使此阶段系统运行的主要能量来源为氢燃料电池,单向dc/dc变换器1为此阶段主要的可控功率供给装置,同时双向dc/dc变换器2和双向dc/dc变换器3根据超级电容器的储能总量、锂电池荷电状态和供电母线电压波动情况控制能量传输方向,此阶段二者作为辅助功率供给装置,在维持能量源稳定状态的前提下为系统提供小比例的输出功率;
25、模式三:所述大载荷氢动力无人机匀速飞行且瞬变发射子系统输入电流处于非停供时段时,由氢燃料电池和锂电池共同维持系统电流稳定输出,所述能量传输控制器根据反馈的电流信息调节能量传输比例,使此阶段系统运行的主要能量来源为氢燃料电池和锂电池,单向dc/dc变换器1和双向dc/dc变换器3为此阶段主要的可控功率供给装置,同时超级电容器作为小占比能量源用以维持供电母线电压稳定,双向dc/dc变换器2为此阶段的辅助功率供给装置;
26、模式四:大载荷氢动力无人机降速落地时的供给能量分配,此时瞬变发射子系统不再需要能量供应,氢燃料电池能够维持系统电流稳定输出并留有较大余量,所述能量传输控制器根据反馈的电流信息调节能量传输比例,使此阶段系统运行的主要能量来源为氢燃料电池,单向dc/dc变换器1为此阶段主要的可控功率供给装置,同时双向dc/dc变换器2和双向dc/dc变换器3作为辅助功率供给装置,在维持能量源稳定状态的前提下为系统提供极小比例的输出功率。
27、作为优选:所述地面通信站由控制指令信道与监控数据信道组成。
28、所述控制指令信道用于发送控制指令给所述空中主作业装置,实现包括大载荷氢动力无人机的飞行控制和瞬变电磁探测子系统的瞬变电磁探测控制在内的作业任务;所述监控数据信道用于回传、显示所述空中主作业装置数据,实现了包括剩余储氢量、锂电池电压、超级电容器荷电状态、飞行定位、飞行姿态、安全监控、航线任务完成进度、发射机最高钳位电压、发射电流波形、接收线圈感应电压、线圈姿态、线圈离地高等信息在内空中系统信息的监测。
29、作为优选:所述开关电路包括补能电路、储能电容、钳位电路和全桥发射电路,所述复合供电母系统通过补能电路依次连接储能电容和钳位电路,为所述全桥发射电路提供电信号,控制全桥发射电路的工作模式和驱动逻辑,实现对发射线圈的工作驱动;
30、复合供电母系统还经全桥发射电路为发射线圈提供工作电流。
31、通过上述设计,所述开关电路用于为发射线圈提供具有快前沿特性和快关断沿特性的双极性电流脉冲,其中,所述补能电路用于在发射电流停供阶段为储能电容注入能量,为下一次发射的电流脉冲上升速率提升提供足够的能量保证;所述储能电容经钳位电路与全桥发射电路相连,在发射电流上升沿期间为线圈提供能量;所述钳位电路在电流脉冲的上升沿和下降沿期间为发射线圈和储能模块提供能量通路,利用电路在该时段内的高压特性提升电流脉冲的前沿上升速率和关断速率;所述全桥发射电路在特定时序控制下构成具有固定开通时长和关断时长的逆变结构,为发射线圈提供正向和反向交替的电流脉冲。
32、作为优选:所述补能电路由dc/dc变换器4、高压电容ch、使能开关q6和补能电感lb组成,所述储能电容为电容器组cb,所述钳位电路由钳位开关q5、二极管da和二极管db组成,所述全桥发射电路由igbt管q1、igbt管q2、igbt管q3和igbt管q4组成;
33、所述dc/dc变换器4的正向输入端与所述复合供电母系统的正电源连接,该dc/dc变换器4的负向输入端和复合供电母系统的负电源连接,该dc/dc变换器4的正向输出端串高压电容ch后接负电源;
34、所述dc/dc变换器4的正向输出端还与所述使能开关q6的源极连接,该使能开关q6的栅极接能量传输控制器,该使能开关q6的漏极经补能电感lb接二极管db的阳极,二极管db的阴极串储能电容后接负电源;
35、所述二极管db的阴极还接钳位开关q5的集电极,该钳位开关q5的基极接能量传输控制器,该钳位开关q5的发射极与所述全桥发射电路的正电源连接;
36、所述复合供电母系统的正电源经二极管da与全桥发射电路的正电源连接,所述igbt管q1和igbt管q3的集电极与全桥发射电路的正电源连接,所述igbt管q1的发射极与所述igbt管q2的集电极连接,所述igbt管q3的发射极与所述igbt管q4的集电极连接,所述igbt管q2和igbt管q4的发射极接负电源;
37、所述igbt管q1、igbt管q2、igbt管q3和igbt管q4的基极均与能量传输控制器连接;
38、所述发射线圈的前端与所述igbt管q1的发射极连接,该发射线圈的后端与所述igbt管q3的发射极连接。
39、所述dc/dc变换器4为高增益升压变换器。
40、作为优选:所述发射线圈采用多匝金属导线绕制而成,呈圆形、方形或其他闭合环路的形式;令线圈匝数为n,单匝线圈面积为s,发射的电流脉冲峰值为ip,则瞬变电磁探测子系统的发射磁矩为:
41、m=nsip。
42、提升发射磁矩有利于增强系统探测能力,对于匝数、面积固定的发射线圈其关键在于提升电流脉冲峰值。
43、在开关电路中实现陡电流脉冲的发射,其关键在于以下4个步骤:
44、步骤一:t0-t1时段内,所述能量传输控制器控制钳位开关q5、igbt管q1和igbt管q4同时开通,使得高压电容ch迅速为发射线圈充电,储能电容cb、钳位开关q5、igbt管q1、电感lo、线圈内阻ro和igbt管q4形成谐振环路,令储能电容cb初始电压为u0,建立以下二阶微分方程:
45、
46、其中,d为使能开关q6的导通占空比,t为时间,lo为电感值,ro为线圈内阻值,cb为储能电容值;
47、可得电流脉冲上升沿阶段电感电流的时域表达式为:
48、
49、进一步得到t1时刻的电感电流脉冲峰值i1为:
50、
51、其中,d2为钳位开关q5的导通占空比;
52、其中,μ0和δ0表示为:
53、
54、该过程中储能电容cb为发射电流迅速增加提供了全部的能量来源,共源母线一侧无电流输出,因此复合供电母系统的供电状况属于第二种模式,即单向dc/dc变换器1为此阶段主要的可控功率供给装置,同时双向dc/dc变换器2和双向dc/dc变换器3作为辅助功率供给装置,在维持能量源稳定状态的前提下为瞬变电磁探测子系统提供小比例的输出功率;
55、步骤二:t1-t2时段,所述能量传输控制器控制钳位开关q5关断而igbt管q1和igbt管q4持续导通,电感电流i0不再由储能电容cb充电维持,二极管da自然导通使us向发射线圈供电续流,脉冲电流进入平顶阶段;忽略二极管和开关管压降,建立一阶微分方程:
56、
57、其中,us为共源母线的输出电压;
58、可得电流脉冲平顶阶段电感电流的时域表达式为:
59、
60、该过程中共源母线为发射电流的平顶维持提供了全部的能量来源,此时共源母线输出至发射线圈的电流处于较高水平,因此复合供电母系统的供电状况属于第三种模式,即单向dc/dc变换器1和双向dc/dc变换器3为此阶段主要的可控功率供给装置,同时超级电容作为小占比能量源用以维持母线电压稳定,双向dc/dc变换器2为此阶段的辅助功率供给装置;
61、步骤三:t2-t3时段,所述能量传输控制器控制igbt管q1和igbt管q4关断,使得电感电流io进入下降沿阶段,电感lo、线圈内阻ro、续流二极管d2、续流二极管d3、续流二极管d5和储能电容cb构成新的谐振回路,电感lo中存储的电能在这一阶段完全反馈给储能电容cb;令该阶段结束时的储能电容cb电压为u2,可得电流脉冲下降沿阶段电感电流的时域表达式为:
62、
63、该过程中电感lo向储能电源cb充电,共源母线一侧无电流输出,因此复合供电母系统的供电状况属于第二种模式,即单向dc/dc变换器1为此阶段主要的可控功率供给装置,同时双向dc/dc变换器2和双向dc/dc变换器3作为辅助功率供给装置,在维持能量源稳定状态的前提下为系统提供小比例的输出功率;
64、步骤四:t4-t5时段内,虽然发射电流处于停供阶段,但该时段内使能开关q6导通,dc/dc变换器4、高压电容ch、补能电感lb、使能开关q6、二极管db和储能电容cb构成谐振回路,其中,req代表使能开关q6、补能电感lb和储能电容cb三者的等效电阻之和;建立以下关于电容电压ucb(t)的二阶微分方程:
65、
66、其中,k为dc/dc变换器4的电压增益;
67、可得电容电压ucb的时域表达式为:
68、
69、充电电流峰值为:
70、
71、其中μ2、δ2和θ2表示为:
72、
73、该过程中共源母线为补能电路的充电过程提供了全部的能量来源,此时共源母线输出至发射线圈的电流处于较高水平,因此复合供电母系统的供电状况属于第三种模式,即单向dc/dc变换器1和双向dc/dc变换器3为此阶段主要的可控功率供给装置,同时超级电容作为小占比能量源用以维持母线电压稳定,双向dc/dc变换器2为此阶段的辅助功率供给装置。
74、综上所述,每半个发射周期内有两个时段处于第三种模式,分别对应图8中的t1-t2以及t4-t5时段,剩余四个时段t0-t1、t2-t3、t3-t4、t5-t6系统处于第二种模式,所述能量传输控制器根据反馈的电流信息调节能量传输比例,根据不同供电模式实时做出控制和调整,以氢能源为供能主体,锂电池和超级电容器作为辅助供电装置,保证大载荷氢动力无人机载瞬变电磁探测系统工作稳定性的同时实现高效、绿色勘查。
75、本实用新型的有益效果是:能量供给方式更节能,能量分配方式更合理,实现了大载荷氢动力无人机载瞬变电磁探测系统的轻量化生产和长航时作业,同时还保证了该大载荷氢动力无人机载瞬变电磁探测系统施工时的低碳与环保。
- 还没有人留言评论。精彩留言会获得点赞!