结构光三维测量系统
本技术涉及三维测量,尤其涉及一种结构光三维测量系统。
背景技术:
1、在面部识别、生物研究、文物保护、产品设计、医学诊断、逆向工程、质量控制、工业制造等领域,通常采用三维面型测量对目标物体表面形状和结构进行非接触式三维结构扫描,获取目标物体表面准确的三维结构信息,然后基于获得的三维结构信息进行三维建模,生成目标物体的三维全景图。
2、常用的三维面型测量技术有结构光三维面型测量技术、光学相干层析成像面型测量技术、连续扫描激光面型测量技术、立体视觉面型测量技术、结构光与立体视觉融合的面型测量技术。
3、其中,结构光三维面型测量技术是在测量场景中投射带有一定光斑或光纹图样的结构化光,使用成像装置捕捉目标物体上形变后的光斑或光纹图案得到三维扫描数据;经过多视点三维扫描数据后,对多视点获得的目标物体的三维扫描数据进行配准和拼接,通过特征匹配方法将各个视点的目标物体的三维扫描数据联合到同一坐标系统下,最终获得整个目标物体的表面三维点云数据,基于三维点云数据生成目标物体的三维全景图。由于结构光三维测量技术具有测量速度快、精度高、可移植性强等优点,其被广泛用于工业测量、逆向工程、质量控制、文物保护、面部识别等领域。例如,通过结构光三维面型测量技术对熊猫体形进行测量,以跟踪其生长周期内的体态变化;通过结构光三维测量技术对深色电路器件表面进行三维面型测量,以检测器件表面的缺陷信息。
4、然而,发明人在实现本实用新型实施例中的技术方案的过程中发现,现有的结构光三维测量系统至少存在如下技术问题:
5、现有的结构光三维测量系统在对弱纹理、弱反射区域多、易变形的柔性目标物体时,提取到的能够进行特征匹配的有效特征点少,通过特征匹配实现多视点目标物体的三维扫描数据拼接难度很大,且获得的目标物体的三维轮廓精度较差。
技术实现思路
1、本实用新型实施例的目的在于提供一种结构光三维测量系统,用以解决现有的结构光三维测量系统对弱特征柔性目标物体进行三维测量时提取到的能够进行特征匹配的有效特征点少,很难通过特征匹配实现多视点的目标物体三维扫描数据拼接,且获得的目标物体的三维轮廓精度较差的缺陷。
2、为了实现上述目的,本实用新型实施例中采用的技术方案如下:
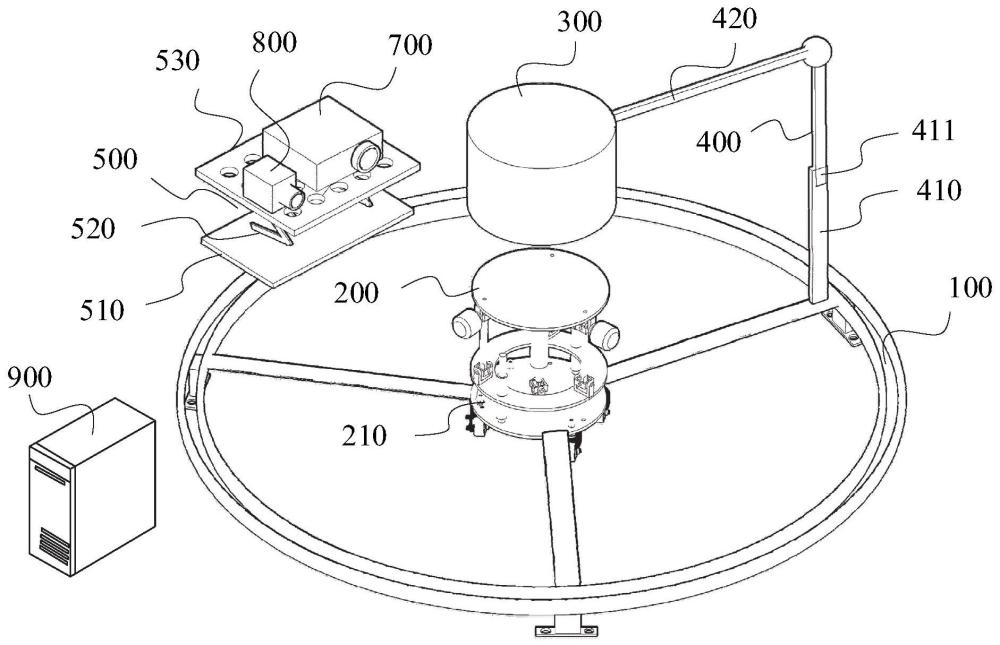
3、本实用新型实施例中提供一种结构光三维测量系统,能够对弱特征柔性目标物体进行三维面型测量;所述结构光三维测量系统包括:
4、环形轨道;所述环形轨道通过轨道支架设置在测量场景中;
5、云台;所述云台通过云台支架设置在所述环形轨道的中心位置;
6、置物台;所述置物台通过可升降的置物支架设置在所述云台的正上方,用于放置目标物体;所述置物台的外周面具有配准斑纹图案,所述配准斑纹图案的三维扫描数据用于辅助完成多个视点的目标物体三维扫描数据拼接;
7、移动测量车;所述移动测量车包括车体、固定设置在所述车体上的可伸缩z型支架,固定设置在所述可伸缩z型支架上的安装板,固定设置在所述车体下方的至少两个电动滑轮,与至少两个所述电动滑轮的一个传动连接的驱动电机;所述驱动电机用于驱动所述移动测量车在所述环形轨道上移动;
8、运动控制器;所述运动控制器与所述驱动电机电连接,用于控制所述驱动电机的工作状态;
9、结构光投影装置;所述结构光投影装置通过所述安装板设置在所述移动测量车上,用于将编码光斑或光纹投射到目标物体的表面,在目标物体表面形成编码光斑或光纹图案;
10、摄像装置;所述摄像装置通过所述安装板设置在所述移动测量车上,与所述结构光投影装置相配合,用于采集包含目标物体表面形成的编码光斑或光纹图案和所述置物台的外周面上的所述配准斑纹图案的图像信息;
11、所述结构光投影装置和所述摄像装置并行设置在所述移动测量车上,两者的镜头均对准所述置物台;所述可伸缩z型支架用于调整所述结构光投影装置和所述摄像装置的高度位置和俯仰角;
12、上位机;所述上位机与所述摄像装置信号连接,能够接收所述摄像装置传来的图像信息;在获取所述摄像装置多视点采集的图像信息后,所述上位机能够基于多视点采集的图像信息,得到所述配准斑纹图案的多视点三维扫描数据,以及得到并基于编码光斑或光纹图案的多视点三维扫描数据,得到目标物体的多视点三维扫描数据;所述上位机还能够基于所述配准斑纹图案的多视点三维扫描数据,对目标物体的多视点三维扫描数据进行配准和拼接,基于配准和拼接后的目标物体的多视点三维扫描数据重构目标物体的三维轮廓信息。
13、可选地,所述置物台外周面为分布有所述配准斑纹图案的圆柱面。
14、可选地,所述配准斑纹图案为黑白相间的点阵图案。
15、可选地,所述上位机包括:
16、图像区域处理模块;所述图像区域处理模块用于基于一预设的反射率选择阈值将低于反射率选择阈值的目标物体的图像区域确定为弱反射区域,将大于或者等于反射率选择阈值的目标物体的图像区域确定为正常反射率区域,对弱反射区域进行低反射率相位处理,对正常反射率区域进行正常反射率相位处理;
17、弱反射区域处理模块;所述弱反射区域处理模块用于将弱反射区域的图像信息的中的绿色分量信息屏蔽;
18、三维测量模块;所述三维测量模块用于对正常反射率区域进行多频相移处理,生成正常反射率区域的目标物体轮廓信息;还用于通过去除绿色分量信息的弱反射区域的图像信息生成弱反射区域的目标物体三维轮廓信息;以及用于基于弱反射区域的目标物体三维轮廓和正常反射率区域的目标物体三维轮廓生成整个目标物体三维轮廓信息。
19、可选地,所述云台支架下方设置有的滑轮组。
20、可选地,所述置物支架包括可伸缩竖向支杆、围绕所述可伸缩竖向支杆可水平周向转动的水平支杆;所述可伸缩竖向支杆上设置有伸缩调节旋钮;所述置物台固定连接所述水平支杆的末端。
21、可选地,所述安装板上具有对称分布的圆形安装孔阵列,通过所述圆形安装孔阵列的圆形安装孔将所述结构光投影装置和所述摄像装置并行设置在所述安装板上。
22、可选地,所述运动控制器包括显示屏、按键组;其中,所述显示屏用于显示所述驱动电机当前设定参数及工作状态;所述按键组用于控制电动滑轮的运动状态。
23、可选地,所述结构光投影装置和所述摄像装置均与所述上位机通信连接,以能够通过所述上位机控制所述结构光投影装置和所述摄像装置。
24、可选地,所述云台支架与所述环形轨道通过至少两条辐杆固定连接,以使所述云台支架与所述环形轨道在测量过程中的相对位姿关系保持稳定。
25、基于上述技术方案,本实用新型实施例中的结构光三维测量系统,通过所述云台支架、所述云台、所述可升降的置物支架、外周面具有所述配准斑纹图案的所述置物台相互配合来确定目标物体的设置位置;通过所述环形轨道、所述运动控制器、所述移动测量车相互配合来确定三维面型测量的测量点;测量点与目标物体的设置位置具有一定的物理位置,从而避免测量过程中出现目标物体因受到外力产生变形的情形;通过所述可伸缩z型支架调整并行设置在所述移动测量车上的所述结构光投影装置和所述摄像装置的高度位置和俯仰角,以使所述结构光投影装置以良好的投射角度向目标物体投射编码光斑或光纹,在目标物体表面形成清晰、对比度高的编码光斑或光纹图案,以使所述摄像装置以良好的拍摄角度进行拍摄,拍摄得到的图像信息中的配准斑纹图案、目标物体、编码光斑或光纹图案成像清晰、轮廓分明、对比度高。
26、基于以上技术手段,优化三维面型测量的目标物体的设置位置、测量点、投光视点和视角、测量视点和视角等因素,进而能够为所述上位机提供的每一张图像信息中均包含所述置物台及其上配准斑纹图案,目标物体及其上的编码光斑或光纹图案,且它们的成像清晰、轮廓分明、对比度高。从而能够为所述上位机提供具有目标物体三维扫描数据配准和拼接参照数据的可建模图像信息源。
27、如此,所述上位机以所述配准斑纹图案的三维扫描数据作为不同视角扫描的参考,根据配准斑纹图案在各视角下的特征变化情况,计算三维扫描数据之间的几何关系,将多个视点目标物体的三维扫描数据联合到同一坐标系统下,所述上位机基于配准和拼接后的目标物体的三维扫描数据重构目标物体的三维轮廓信息,获得高精度目标物体的三维全景图。
28、因此,相较于现有的通过特征匹配实现多视点的目标物体三维扫描数据拼接的结构光三维测量系统,本实用新型实施例中的结构光三维测量系统,不仅能够降低目标物体变形的可能性,还能减少目标物体的弱反射区域的数量及面积,以置所述物台外周面的所述配准斑纹图案的三维扫描数据作为不同视角扫描的参考,就可以实现多视点目标物体三维扫描数据的配准和拼接,重构高精度的目标物体的三维轮廓信息,进而解决了现有结构光三维测量系统存在的技术问题。
- 还没有人留言评论。精彩留言会获得点赞!