一种臂架应变监测系统及工程机械的制作方法
本技术属于设备安全监测,具体地涉及一种臂架应变监测系统及工程机械。
背景技术:
1、目前在国内传统的臂架设计过程中为保证安全计算较为保守,臂架安全设计依赖于前期静态安全系数法分析。而在臂架实际运动过程中,臂架运动过程数据与臂架应变间相互关系也对臂架的安全性能至关重要,现有技术忽略了实际运行过程中的工况参数的随机波动对结构安全性能的影响,使得当前臂架结构无法得到满意的性能参数,同时臂架长度从数米至数百米不等,传统的有线布局方式对于频繁动作的臂架系统固然不便。
2、可见,现有的臂架存在工况数据采集不便的技术问题。
技术实现思路
1、有鉴于此,本实用新型实施例的目的是提供一种臂架应变监测系统及工程机械,能够解决现有的臂架工况数据采集不便的问题。
2、为了解决上述技术问题,本实用新型是这样实现的:
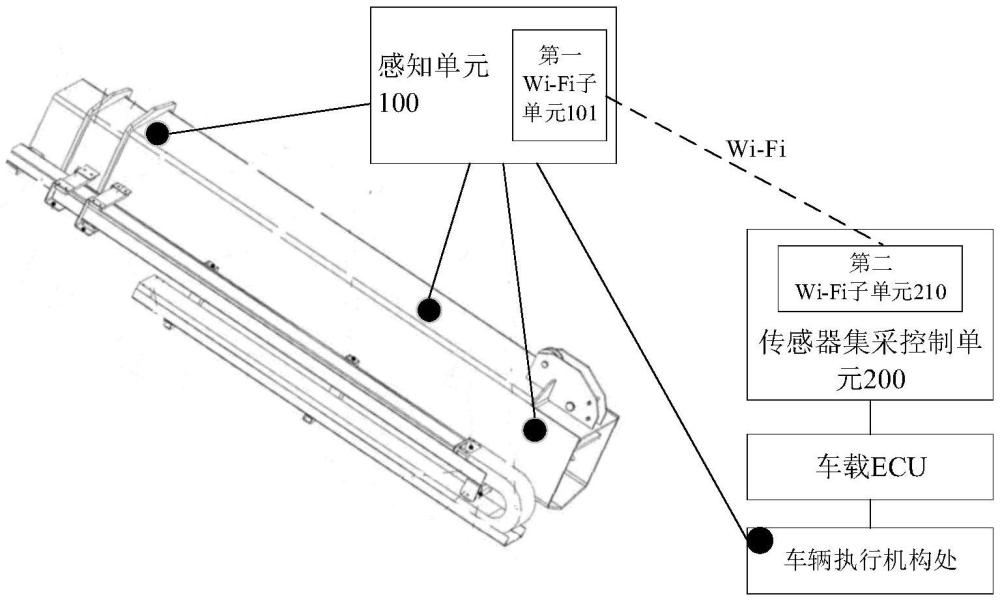
3、第一方面,本实用新型提供了一种臂架应变监测系统,包括:
4、多个感知单元,用于采集所述臂架的各个监测点的特征参数;
5、每个所述感知单元均包括第一wi-fi子单元;
6、传感器集采控制单元,包括第二wi-fi子单元,用于对所述多个感知单元进行控制;
7、每个所述感知单元均通过所述第一wi-fi子单元与所述传感器集采控制单元的第二wi-fi子单元进行无线连接。
8、在本实用新型实施例中,所述多个感知单元还包括安装于所述臂架的根部的激光测量感知单元,所述激光测量感知单元包括:
9、激光测距传感器,用于测量所述臂架的伸缩长度。
10、在本实用新型实施例中,所述多个感知单元还包括安装于所述臂架的节臂耦合点的应变感知单元,所述应变感知单元包括:
11、应变监测传感器,用于测量所述臂架的应变参数。
12、在本实用新型实施例中,所述多个感知单元还包括安装于车辆执行机构处的载荷感知单元,所述载荷感知单元包括:
13、压力传感器,用于测量所述臂架的载荷。
14、在本实用新型实施例中,所述多个感知单元还包括安装于所述臂架上的倾角感知单元,所述倾角感知单元包括:
15、双轴倾角传感器,用于测量所述臂架的倾斜角度。
16、在本实用新型实施例中,所述每个感知单元均包括:
17、供电单元,用于为所述感知单元供电;
18、模数转换单元,与所述供电单元连接,用于采集所述供电单元的电量;
19、电源转换单元,与所述供电单元连接,用于对所述供电单元提供的电能进行转换。
20、在本实用新型实施例中,所述每个感知单元还包括:
21、加速度传感器,用于采集所述感知单元的加速度。
22、在本实用新型实施例中,所述每个感知单元还包括:
23、led,用于显示所述感知单元的工作状态。
24、在本实用新型实施例中,所述传感器集采控制单元还包括:
25、三色灯,用于显示所述传感器集采控制单元的自身状态信息;
26、can接口,用于与车载ecu连接。
27、第二方面,本实用新型提供了一种工程机械,包括根据第一方面中任一项所述的臂架应变监测系统。
28、本实用新型的上述实施例提供一种臂架应变监测系统及工程机械。通过分布在臂架各个部位的感知单元分别采集臂架不同的工况数据,并由传感器集采控制单元对各个感知单元统一进行控制,从而可以方便快捷地动态采集臂架的伸缩几何尺寸、倾斜角度和臂架随车运动载荷等参数。
技术特征:
1.一种臂架应变监测系统,其特征在于,包括:
2.根据权利要求1所述的臂架应变监测系统,其特征在于,所述多个感知单元包括安装于所述臂架的根部的激光测量感知单元,所述激光测量感知单元包括:
3.根据权利要求1所述的臂架应变监测系统,其特征在于,所述多个感知单元包括安装于所述臂架的节臂耦合点的应变感知单元,所述应变感知单元包括:
4.根据权利要求1所述的臂架应变监测系统,其特征在于,所述多个感知单元包括安装于车辆执行机构处的载荷感知单元,所述载荷感知单元包括:
5.根据权利要求1所述的臂架应变监测系统,其特征在于,所述多个感知单元包括安装于所述臂架上的倾角感知单元,所述倾角感知单元包括:
6.根据权利要求1所述的臂架应变监测系统,其特征在于,所述每个感知单元均包括:
7.根据权利要求1所述的臂架应变监测系统,其特征在于,所述每个感知单元还包括:
8.根据权利要求1所述的臂架应变监测系统,其特征在于,所述每个感知单元还包括:
9.根据权利要求1所述的臂架应变监测系统,其特征在于,所述传感器集采控制单元还包括:
10.一种工程机械,其特征在于,包括根据权利要求1至9任一项所述的臂架应变监测系统。
技术总结
本技术提供一种臂架应变监测系统及工程机械,臂架应变监测系统包括:多个感知单元,用于采集所述臂架的各个监测点的特征参数;每个所述感知单元均包括第一Wi‑Fi子单元;传感器集采控制单元,包括第二Wi‑Fi子单元,用于对所述多个感知单元进行控制;每个所述感知单元均通过所述第一Wi‑Fi子单元与所述传感器集采控制单元的第二Wi‑Fi子单元进行无线连接。由此,可以方便快捷地动态采集臂架的伸缩几何尺寸、倾斜角度和臂架随车运动载荷等参数。
技术研发人员:周海雷,虢彦,杨永哲,吕亮
受保护的技术使用者:中科云谷科技有限公司
技术研发日:20230927
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!