一种转向系统的转角测试方法、系统、设备以及介质与流程
本发明涉及汽车制造,具体涉及一种转向系统的转角测试方法、系统、设备以及介质。
背景技术:
1、随着车辆智能化的发展,现有市场上越来越多的车辆搭载包括驾驶辅助、自动驾驶等在内的智能驾驶功能,当智能驾驶功能介入车辆控制时,可以通过控制车辆转向系统实现对车辆的智能驾驶控制,例如采用实现转角请求的驾驶辅助功能。
2、进一步的,为了减少智能驾驶控制对于车辆以及乘员的安全影响,需要在开发阶段对智能驾驶中采用转角请求的驾驶辅助功能进行功能测试,然而目前的试验方法无法进行故障注入测试,与实际的驾驶状况的契合度较低,无法满足对采用转角请求的驾驶辅助功能的测试需求,影响测试结果的有效性。
技术实现思路
1、本技术提出了一种转向系统的转角测试方法、系统、设备以及介质,旨在在开发阶段实现对转向系统中采用转角请求的驾驶辅助功能进行更高标准的故障注入测试,以满足测试需求,进而提升测试结果的有效性。
2、为实现上述目的,本技术的第一方面提供了一种转向系统的转角测试方法,所述方法应用于与所述转向系统连接的测试系统,所述转向系统设置有标定转角传感器和目标转角传感器,所述方法包括:
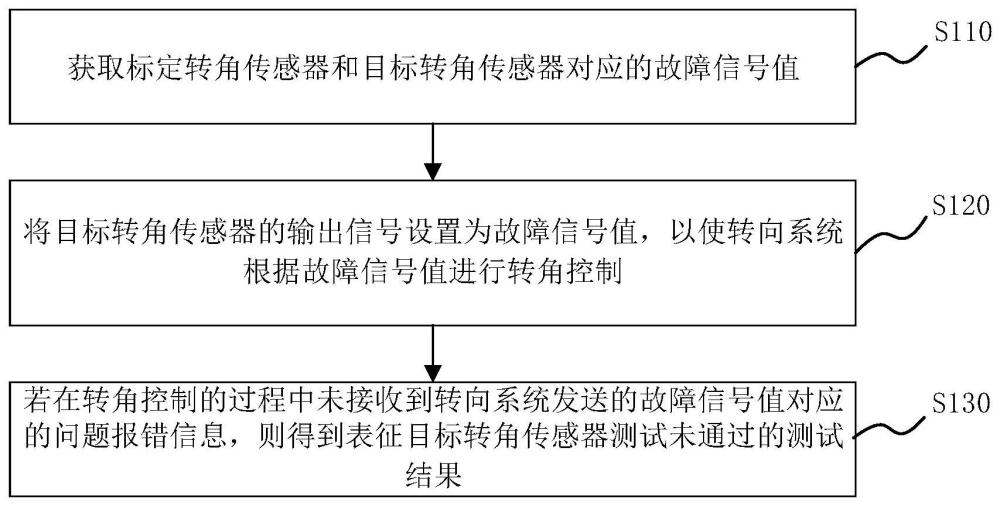
3、获取所述标定转角传感器和所述目标转角传感器对应的故障信号值;
4、将所述目标转角传感器的输出信号设置为所述故障信号值,以使所述转向系统根据所述故障信号值进行转角控制;
5、若在所述转角控制的过程中未接收到所述转向系统发送的所述故障信号值对应的问题报错信息,则得到表征所述目标转角传感器测试未通过的测试结果。
6、在本技术一些可能的实施例中,所述故障信号值包括第一信号值和第二信号值,所述获取所述标定转角传感器和所述目标转角传感器对应的故障信号值,包括:
7、根据预设偏差值、所述标定转角传感器的标定误差值、所述目标转角传感器的第一输出信号以及第一误差值,得到所述第一信号值和所述第二信号值;
8、其中,所述第一信号值为所述第一输出信号减去所述第一误差值、所述标定误差值和所述预设偏差值;所述第二信号值为所述第一输出信号加上所述第一误差值、所述标定误差值和所述预设偏差值。
9、在本技术一些可能的实施例中,所述将所述目标转角传感器的输出信号设置为所述故障信号值,以使所述转向系统根据所述故障信号值进行转角控制,包括:
10、将所述目标转角传感器的输出信号设置为所述第一信号值,以使所述转向系统根据所述第一信号值进行第一转角控制;
11、将所述转向系统恢复至正常运行状态,并将所述第二转角传感器的输出信号设置为所述第二信号值,以使所述转向系统根据所述第二信号值进行第二转角控制;
12、所述若在所述转角控制的过程中未接收到所述转向系统发送的所述故障信号值对应的问题报错信息,则得到表征所述目标转角传感器测试未通过的测试结果,包括:
13、若在所述第一转角控制或者所述第二转角控制的过程中,未接收到所述转向系统发送的所述故障信号值对应的问题报错信息,则得到表征所述目标转角传感器测试未通过的测试结果。
14、在本技术一些可能的实施例中,所述转向系统还设置有位移传感器,所述方法还包括:
15、根据所述标定转角传感器标定输出信号以及所述位移传感器位移信号、位移误差以及线角传动比,得到下限行程误差值和上限行程误差值;
16、根据预设偏差值、所述下限行程误差值、所述上限行程误差值、所述目标转角传感器的第一输出信号以及第一误差值,得到所述第一信号值和所述第二信号值;
17、其中,所述第一信号值为所述第一输出信号减去所述第一误差值和所述预设偏差值,再加上所述下限行程误差值;所述第二信号值为所述第一输出信号加上所述第一误差值、所述上限行程误差值和所述预设偏差值。
18、在本技术一些可能的实施例中,所述位移传感器包括在所述转向系统齿条两端同轴安装的第一位移传感器和第二位移传感器,所述方法还包括:
19、分别将所述目标转角传感器的输出信号设置为所述第一位移传感器对应的所述第一信号值和所述第二信号值,以及所述第二位移传感器对应的所述第一信号值和所述第二信号值,以使所述转向系统根据多个所述故障信号值进行多次转角控制;
20、若在任意所述转角控制的过程中未接收到所述转向系统发送所述故障信号值对应的问题报错信息,则得到表征所述目标转角传感器测试未通过的测试结果。
21、在本技术一些可能的实施例中,所述目标转角传感器包括第一转角传感器和第二转角传感器,所述方法还包括:
22、分别将所述第一转角传感器和所述第二转角传感器的输出信号设置为对应的所述第一信号值,以使所述转向系统根据所述第一信号值进行第三转角控制;
23、将所述转向系统恢复至正常运行状态,并分别将所述第一转角传感器和所述第二转角传感器的输出信号设置为对应的所述第二信号值,以使所述转向系统根据所述第二信号值进行第四转角控制;
24、若在所述第三转角控制或者所述第四转角控制的过程中,未接收到所述转向系统发送的所述故障信号值对应的问题报错信息,则得到表征所述目标转角传感器测试未通过的测试结果。
25、在本技术一些可能的实施例中,在所述转向系统齿条两端同轴安装有第一位移传感器和第二位移传感器,所述方法还包括:
26、将所述第一转角传感器的输出信号设置为所述第一位移传感器对应的所述第一信号值,并将所述第二转角传感器的输出信号设置为所述第二位移传感器对应的所述第一信号值,以使所述转向系统根据所述第一信号值进行第三转角控制;
27、将所述转向系统恢复至正常运行状态,并将所述第一转角传感器的输出信号设置为所述第一位移传感器对应的所述第二信号值,以及将所述第二转角传感器的输出信号设置为所述第二位移传感器对应的所述第二信号值,以使所述转向系统根据所述第二信号值进行第四转角控制。
28、在本技术一些可能的实施例中,所述标定转角传感器包括在所述转向系统输入轴处安装的外部转角传感器,所述获取所述标定转角传感器和所述目标转角传感器对应的故障信号值之前,所述方法还包括:
29、根据外部转角传感器的标定误差值和标定输出信号向所述转向系统发送转角控制值信息与控制方向信息,以使所述转向系统处于正常运行状态,并获取所述转向系统的运行反馈信息。
30、在本技术一些可能的实施例中,所述将所述目标转角传感器的输出信号设置为所述故障信号值,以使所述转向系统根据所述故障信号值进行转角控制之后,所述方法还包括:
31、在获取到表征所述转向系统主动停止接收转角控制的状态信息的情况下,得到表征所述目标转角传感器测试未通过的测试结果。
32、为实现上述目的,本技术的第二方面提供了一种测试系统,所述测试系统与转向系统连接,所述转向系统设置有标定转角传感器和目标转角传感器,所述测试系统包括:
33、信号处理单元,用于获取所述标定转角传感器和所述目标转角传感器对应的故障信号值;
34、故障注入单元,用于将所述目标转角传感器的输出信号设置为所述故障信号值,以使所述转向系统根据所述故障信号值进行转角控制;
35、结果确定单元,用于在所述转角控制的过程中未接收到所述转向系统发送的所述故障信号值对应的问题报错信息,则得到表征所述目标转角传感器测试未通过的测试结果。
36、为实现上述目的,本技术实施例的第三方面提出了一种电子设备,所述电子设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述第一方面所述的方法。
37、为实现上述目的,本技术实施例的第四方面提出了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面所述的方法。
38、本技术实施例提供的一种转向系统的转角测试方法、系统、设备以及介质,方法包括:获取所述标定转角传感器和所述目标转角传感器对应的故障信号值;将所述目标转角传感器的输出信号设置为所述故障信号值,以使所述转向系统根据所述故障信号值进行转角控制;若在所述转角控制的过程中未接收到所述转向系统发送的所述故障信号值对应的问题报错信息,则得到表征所述目标转角传感器测试未通过的测试结果,其中,本技术通过模拟实际故障信号,以在开发阶段实现对转向系统中采用转角请求的驾驶辅助功能进行更高标准的故障注入测试,有效提升了转向系统转角传感器的测试准确性和实际驾驶场景的契合度,以满足转向系统的转角控制测试需求,使得测试系统能更准确的评估转角传感器在故障情况下的响应,提高测试结果的有效性,进而可以确保转角控制的可靠性和车辆安全性。
- 还没有人留言评论。精彩留言会获得点赞!