一种水田耕整机及其水田耕深检测装置和方法与流程
本发明涉及农业智能检测和信息融合技术,特别是一种水田耕整机及其利用多传感器信息融合检测水田旋耕的水田耕深检测装置和方法。
背景技术:
1、水田耕整是水稻生产中的重要环节,水田的精准耕整有利于提高水肥利用率和灌水均匀度,减少杂草和病虫害,减轻环境污染。耕深是评价水田耕整质量的最为重要的参数,对农作物的生长、增产具有重大意义。耕深过浅会不满足农技要求,不利于作物根系生长,影响作物的生长发育和产量;耕深过深则会增加拖拉机功率消耗,增加作业成本,影响作业效率。因此,准确检测水田旋耕的耕深有重要意义。
2、现有技术旋耕的耕深检测普遍采用单个倾角传感器,将其安装在拖拉机和旋耕机的三点悬挂连接的悬臂上,检测悬臂的倾角变化,并通过建立几何模型,从而间接检测计算出耕深。虽然这种方法在旱田耕整时,准确度和可靠性均获得认可,但在应对地形起伏较复杂、土地粘性较大的水田旱旋耕的场景时,会因拖拉机在田内作业的泥脚变化较大,导致倾角传感器的标定不再准确有效,使检测到的耕深数值误差较大。同时,现有技术所建立的几何模型,为减少硬件的计算量,采用简化模型,假设农机作业于平整坚硬的路面,忽略了地形变化对耕深检测数据的影响。而在水田旱旋耕的作业情况下,拖拉机在作业时会出现横滚、俯仰的姿态变化,导致简化后的模型并不能适应作业场景,而使检测数据存在较大误差。
技术实现思路
1、本发明所要解决的技术问题是针对现有技术的上述缺陷,提供一种水田耕整机及其利用多传感器信息融合检测水田旋耕的水田耕深检测装置和方法。
2、为了实现上述目的,本发明提供了一种水田耕深检测装置,其中,包括:
3、地面仿形机构,用于检测牵引机作业时泥脚陷入深度和地形高低起伏的变化数据;
4、倾角传感器,用于检测所述牵引机的三点悬挂倾角变化以间接获得耕深数据;
5、机身陀螺仪,用于检测所述牵引机的横滚和俯仰姿态,以修正所述牵引机作业时因姿态变换而导致的耕深检测误差;
6、bds双天线系统,用于检测所述牵引机的作业轨迹和耕深变化的绝对值;以及
7、数据处理器,分别与所述仿形机构、bds双天线系统、机身陀螺仪和倾角传感器通讯连接,接收并保存所述仿形机构、bds双天线系统、机身陀螺仪和倾角传感器采集的数据。
8、上述的水田耕深检测装置,其中,所述数据处理器采用单片机开发板,通过can总线分别与所述仿形机构、bds双天线系统、机身陀螺仪和倾角传感器连接,使用sdio控制器将采集的数据保存到sd卡。
9、上述的水田耕深检测装置,其中,所述数据处理器通过fsmc驱动lcd屏幕进行工作状态的实时显示。
10、上述的水田耕深检测装置,其中,所述地面仿形机构为对称结构,包括:
11、横长支架;
12、托板,对称设置在所述横长支架的中心线两侧,并通过连接架与所述横长支架连接,所述托板安装在所述连接架的底端,且所述托板的底部与地面接触;
13、限位板,安装在所述横长支架上,并与所述连接架连接配合,以实现所述托板在横滚方向上的自由度;
14、仿形陀螺仪,安装在所述连接架上;以及
15、回位弹簧,安装在所述连接架上。
16、上述的水田耕深检测装置,其中,所述连接架为矩形框架,所述连接架的前竖杆与所述横长支架连接,所述连接架的后竖杆底端与所述托板铰接,以保证所述托板在仿形过程中俯仰贴合地面。
17、上述的水田耕深检测装置,其中,所述仿形陀螺仪安装在所述连接架的上横杆上,并与所述数据处理器连接,用于检测所述上横杆的角度变化,得到仿形过程中机具的下陷情况和地形高低起伏的量化数据。
18、上述的水田耕深检测装置,其中,所述限位板为弧形板,所述弧形板的两端与所述横长支架连接;所述弧形板的中间为弧形通孔,所述前竖杆上对应设置有与所述中间弧形通孔适配的限位凸台。
19、为了更好地实现上述目的,本发明还提供了一种水田耕深检测方法,其中,包括如下步骤:
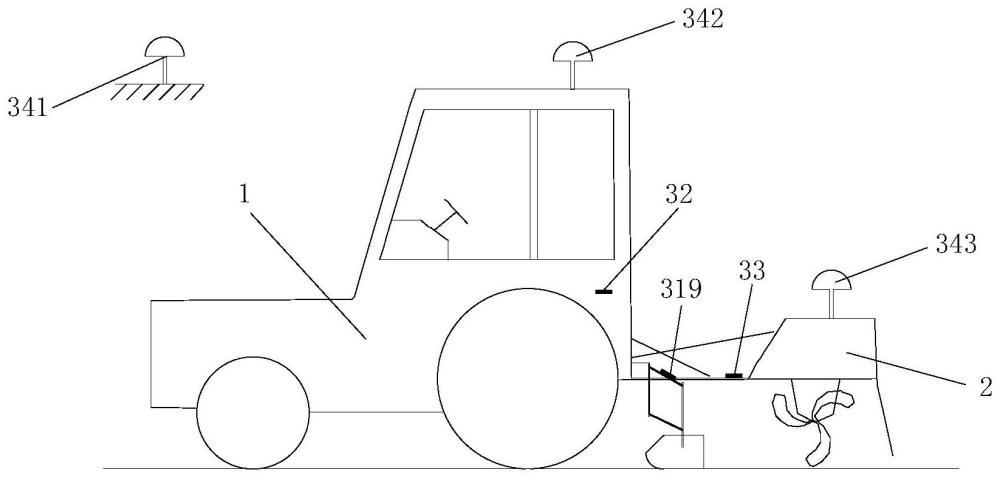
20、s100、将地面仿形机构安装在牵引机后方,用于检测未耕作前地面形状和机具下陷情况作为耕深零基准值;
21、s200、将机身陀螺仪安装于所述牵引机的驾驶室正后方,用于检测牵引机作业过程中的姿态变化作为姿态修正值;
22、s300、将倾角传感器安装于所述牵引机的三点悬挂臂,用于检测三点悬挂臂的倾角变化得到间接耕深值;
23、s400、将bds双天线系统的第一天线和第二天线分别安装于牵引机和旋耕机车顶中轴线上,用于检测牵引机旋耕作业过程中的耕深变化值;
24、s500、在非作业区设立所述bds双天线系统的rtk基站,并分别与所述第一天线和第二天线连接,使所述第一天线和第二天线解算出的数据为rtk修正后的耕深变化值;
25、s600、利用训练好的耕深检测模型对实时获得的所述耕深零值基准、姿态修正值、间接耕深值和耕深变化值进行耕深数据修正;以及
26、s700、对修正后的耕深数据进行融合,得到精确的水田耕深在线检测值。
27、上述的水田耕深检测方法,其中,步骤s700中,采用bp-卡尔曼滤波算法对修正后的耕深数据进行滤波后,再采用卡尔曼融合算法对滤波后的耕深数据进行融合;或步骤s600中,采用bp-卡尔曼滤波算法对修正后的耕深数据进行滤波后,再利用训练好的耕深检测模型进行耕深数据修正。
28、为了更好地实现上述目的,本发明还提供了一种水田耕整机,其中,包括上述的水田耕深检测装置。
29、本发明的技术效果在于:
30、本发明基于多源传感器融合技术进行水田旋耕的耕深检测,采用地面仿形机构,传感器布局和耕深检测模型建立,结合数据滤波和融合算法,利用机具下陷深度和姿态值对检测得到的耕深数据进行修正,并将修正后的数据进行融合,最终得到精确的水田耕深在线检测值,实现了水田耕深的精确在线检测。
31、以下结合附图和具体实施例对本发明进行详细描述,但不作为对本发明的限定。
技术特征:
1.一种水田耕深检测装置,其特征在于,包括:
2.如权利要求1所述的水田耕深检测装置,其特征在于,所述数据处理器采用单片机开发板,通过can总线分别与所述仿形机构、bds双天线系统、机身陀螺仪和倾角传感器连接,使用sdio控制器将采集的数据保存到sd卡。
3.如权利要求2所述的水田耕深检测装置,其特征在于,所述数据处理器通过fsmc驱动lcd屏幕进行工作状态的实时显示。
4.如权利要求1所述的水田耕深检测装置,其特征在于,所述地面仿形机构为对称结构,包括:
5.如权利要求4所述的水田耕深检测装置,其特征在于,所述连接架为矩形框架,所述连接架的前竖杆与所述横长支架连接,所述连接架的后竖杆底端与所述托板铰接,以保证所述托板在仿形过程中俯仰贴合地面。
6.如权利要求5所述的水田耕深检测装置,其特征在于,所述仿形陀螺仪安装在所述连接架的上横杆上,并与所述数据处理器连接,用于检测所述上横杆的角度变化,得到仿形过程中机具的下陷情况和地形高低起伏的量化数据。
7.如权利要求5所述的水田耕深检测装置,其特征在于,所述限位板为弧形板,所述弧形板的两端与所述横长支架连接;所述弧形板的中间为弧形通孔,所述前竖杆上对应设置有与所述中间弧形通孔适配的限位凸台。
8.一种水田耕深检测方法,其特征在于,包括如下步骤:
9.如权利要求8所述的水田耕深检测方法,其特征在于,步骤s700中,采用bp-卡尔曼滤波算法对修正后的耕深数据进行滤波后,再采用卡尔曼融合算法对滤波后的耕深数据进行融合;或步骤s600中,采用bp-卡尔曼滤波算法对修正后的耕深数据进行滤波后,再利用训练好的耕深检测模型进行耕深数据修正。
10.一种水田耕整机,其特征在于,包括权利要求1-7任意一项所述的水田耕深检测装置。
技术总结
一种水田耕整机及其水田耕深检测装置和方法,该水田耕整机包括水田耕深检测装置,该装置包括:地面仿形机构,用于检测牵引机作业时泥脚陷入深度和地形高低起伏的变化数据;倾角传感器,用于检测所述牵引机的三点悬挂倾角变化以间接获得耕深数据;机身陀螺仪,用于检测所述牵引机的横滚和俯仰姿态,以修正所述牵引机作业时因姿态变换而导致的耕深检测误差;BDS双天线系统,用于检测所述牵引机的作业轨迹和耕深变化的绝对值;以及数据处理器,分别与所述仿形机构、BDS双天线系统、机身陀螺仪和倾角传感器通讯连接,接收并保存所述仿形机构、BDS双天线系统、机身陀螺仪和倾角传感器采集的数据。本发明还提供了水田耕深检测方法。
技术研发人员:伟利国,马若飞,周利明,杨悦,刘阳春,姜含露,孙少伟,赵博
受保护的技术使用者:中国农业机械化科学研究院集团有限公司
技术研发日:
技术公布日:2024/4/22
- 还没有人留言评论。精彩留言会获得点赞!