一种观瞄系统的测距光轴平行性原位检测方法
本发明涉及光学检测技术,特别涉及一种测距光轴平行性原位检测方法,更具体地说,本发明涉及一种观瞄系统的主瞄光轴与测距激光发射光轴平行性原位检测方法、和一种观瞄系统的主瞄光轴与测距激光接收光轴平行性原位检测方法,其中光轴平行性主要指瞄准镜的激光发射轴、激光接收轴和瞄准轴的平行性。
背景技术:
1、车载观瞄系统是环境观察的主要依靠,为车辆提供了高效精确的观察能力。车载观瞄系统中良好的光轴平行性是车辆目标瞄准与准确测距的必要条件。传统观瞄系统光轴平行性检测中,部分测试方法需要拆卸观瞄系统进行检测,检测设备体积大,不便于携带,难以满足要求,部分测试方适用范围窄,不能针对不同型号观瞄系统分别组织检测。
2、车载观瞄系统主要光路结构:车载观瞄系统中的光学结构主要作用是为目标瞄准以及测距激光的发射和接收提供光学路径,主要包括主瞄光路、测距激光接收光路、测距激光发射光路。
3、主瞄光路是系统的主光路,也是辆观察瞄准的主要基准光轴,具有连续可变换6~10倍的望远镜功能。其整体结构如图1所示,包括上反射镜101、主瞄物镜102、分光镜103、分划镜104、第一转向透镜105、等腰棱镜106、第二转向透镜107、直角棱镜108、场镜109、目镜组110。目标光线经由上反射镜101稳像后进入物镜组102,由望远镜组和反射镜组放大反射后通过场镜和目镜形成放大的目标图像。
4、测距激光发射光路如图2所示,主要组件包括激光发射器201、发射目镜202、分光镜20、发射物镜204、光楔组件205、上反射镜101、摄像目镜207、图像采集ccd208。
5、光楔组件205是两个光楔组成的旋转光楔结构,利用光线穿过单光楔时总会向光楔厚的一侧偏移的特性,对测距激光发射轴的出射角度进行调整。当光楔组件205两个单光楔厚的一侧同向时,光线偏转角度达到最大,当一厚侧一薄侧相对时,光线偏转角度为0°。通过对光楔组件205的旋转来调校测距激光发射轴与主瞄光轴的光轴平行性,以保证激光测距时能够准确的对瞄准目标进行测距。
6、发射物镜204则是一块胶合透镜,与发射目镜202形成了伽利略式望远镜系统,进一步压缩测距激光的发散角,集中激光能量,保证测距激光照射目标后形成足够强度的回波。
7、测距激光接收光路如图3所示,测距激光接收光路与主瞄光路部分重合。测距激光在照射到测距目标后形成漫反射,部分激光会被反射回车载观瞄系统,经由上反射镜101、保护玻璃、主瞄物镜102后进入主瞄光轴物镜组中的分光镜103。测距回波经过分光镜103中间的镀膜反射后偏转90°进入接收目镜,最后进入雪崩二极管实现对测距回波的采集。
8、车载观瞄系统整体光学结构如图4所示,包括图1-图3所示的主瞄光路、测距激光发射光路和测距激光接收光路。
9、在车载观瞄系统观瞄过程中,目标光线经由主瞄光路进入人眼,如果激光发射光路与主瞄光路光轴具有平行性偏差,会造成激光照射目标与瞄准目标不同,进而造成测距结果的错误。同样,当激光接收光路光轴与主瞄光路光轴存在光轴平行性偏差时,会造成测距回波信号的丢失。因而对三个主要光路的光轴平行性检测是车载观瞄系统技术状态检测的必要环节。
10、从图4中可以看出,主瞄光路与测距激光发射光路完全独立,与测距激光接收轴部分重合,因而,当三轴平行性出现偏差时会导致测距激光照射的位置的偏差、无法接收到测距回波等情况,对车载观瞄系统的性能造成较大影响。
技术实现思路
1、本发明的第一目的是提供一种小型化、便携化的一种观瞄系统的主瞄光轴与测距激光发射光轴平行性原位检测方法。
2、本发明的第二目的是提供一种小型化、便携化的一种观瞄系统的主瞄光轴与测距激光接收光轴平行性原位检测方法。
3、本发明通过应用上述原位检测方法,可以在原位不拆卸条件下实现光轴平行性检测,同时避免检测不同光轴平行性时检测系统的反复架设,实现检测系统窗口对车载观瞄系统窗口的全覆盖。
4、根据本发明第一方面,一种观瞄系统的主瞄光轴与测距激光发射光轴平行性原位检测方法包括:
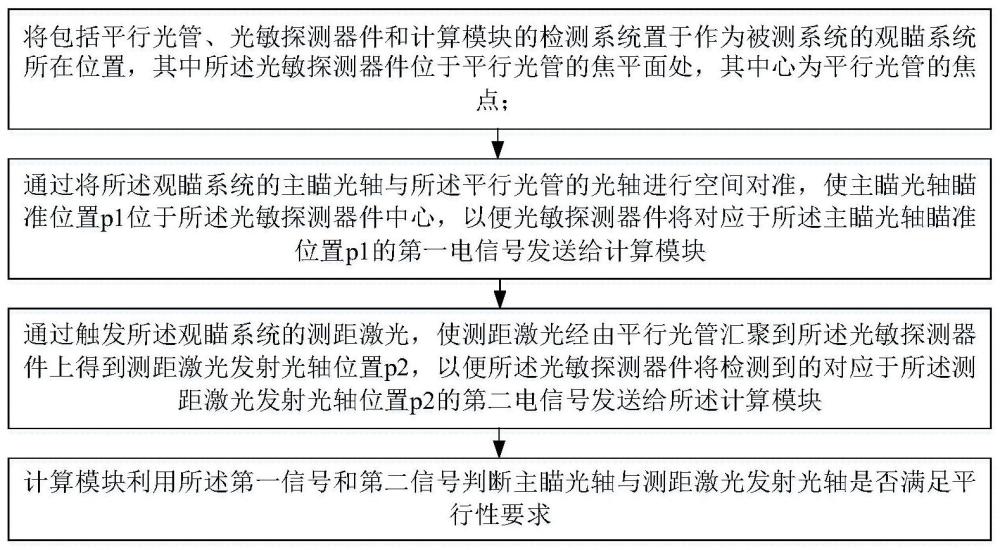
5、将包括平行光管、光敏探测器件和计算模块的检测系统置于作为被测系统的观瞄系统所在位置,其中所述光敏探测器件位于所述平行光管的焦平面处,其中心为所述平行光管的焦点;
6、通过将所述观瞄系统的主瞄光轴与所述平行光管的光轴进行空间对准,使主瞄光轴瞄准位置p1位于所述光敏探测器件中心,以便光敏探测器件将对应于所述主瞄光轴瞄准位置p1的第一电信号发送给计算模块;
7、通过触发所述观瞄系统的测距激光,使测距激光经由平行光管汇聚到所述光敏探测器件上得到测距激光发射光轴位置p2,以便所述光敏探测器件将检测到的对应于所述测距激光发射光轴位置p2的第二电信号发送给所述计算模块;
8、所述计算模块利用所述第一信号和第二信号判断主瞄光轴与测距激光发射光轴是否满足平行性要求。
9、优选地,所述的利用所述第一信号和第二信号判断主瞄光轴与测距激光发射光轴是否满足平行性要求包括:
10、利用所述第一信号和第二信号计算主瞄光轴瞄准位置p1与激光发射光轴位置p2之间的距离d;
11、根据所述距离d和所述平行光管的焦距f计算主瞄光轴的偏差角度
12、将所述偏差角度α与预期值进行比较,若小于预期值,则主瞄光轴与测距激光发射光轴满足平行性要求;反之,则不满足平行性要求。
13、优选地,利用所述第一信号和第二信号计算主瞄光轴瞄准位置p1与激光发射光轴位置p2之间的距离d包括:
14、根据所述第一信号和第二信号计算p2相对于p1的水平方向偏差距离px和垂直方向偏差距离py;
15、利用所述水平方向偏差距离px和垂直方向偏差距离py计算
16、优选地,所述光敏探测器件是响应速度快、线性畸变小的双面型结构psd;
17、所述所述第一信号包括双面型结构psd第一引脚输出的第一电流i1和第二引脚输出的第二电流i2;
18、所述所述第二信号包括双面型结构psd第三引脚输出的第三电流i3和第四引脚输出的第四电流i4;
19、利用所述第一电流i1和所述第二电流i2,解算出所述水平方向距离px,利用所述第三电流i3和所述第四电流i4,解算出所述垂直方向距离py。
20、优选地,本发明根据下式解算出所述水平方向距离px:
21、
22、其中,t为psd的响应时间周期;t为光信号开始照射到采样的时间长度,td为光信号开始照射到光信号停止的时间长度,n为大于1的正整数;
23、优选地,本发明根据下式解算所述垂直方向距离py:
24、
25、其中,t为psd的响应时间周期;t为光信号开始照射到采样的时间长度,td为光信号开始照射到光信号停止的时间长度n为大于1的正整数;
26、根据本发明第二方面,一种观瞄系统的主瞄光轴与测距激光接收光轴平行性原位检测方法包括:
27、将包括平行光管、模拟回波光源和光敏二极管的检测系统置于作为被测系统的观瞄系统附近,其中所述模拟回波光源位于所述平行光管的焦点位置,所述光敏二极管位于平行光管中心轴位置;
28、通过将所述观瞄系统的主瞄光轴与所述平行光管的光轴进行空间对准,使主瞄光轴与平行光管空间平行;
29、在主瞄光轴与平行光管空间平行之后,触发所述观瞄系统的测距激光,检测系统的光敏二极管根据检测到的测距激光,触发所述模拟回波光源,使所述模拟回波光源产生一个带有发散角度β的模拟回波,经由所述平行光管形成一束与主瞄光轴平行的光束;
30、根据测距激光接收光路是否接收到来自模拟回波光源的与主瞄光轴平行的光束,确定观瞄系统的主瞄光轴与测距激光接收光轴是否满足平行性要求。
31、优选地,确定观瞄系统的主瞄光轴与测距激光接收光轴是否满足平行性要求包括:
32、判断所述激光接收光路的雪崩二极管是否收到来自模拟回波光源的与主瞄光轴平行的光束;
33、若雪崩二极管收到来自模拟回波光源的与主瞄光轴平行的光束,则主瞄光轴与测距激光接收光轴满足平行性要求;反之,则不满足平行性要求。
34、优选地,所述模拟回波的发散角度其中d为平行光管直径,f为平行光管焦距。
35、优选地,所述检测系统置还包括用来对模拟回波光源直径进行限制的小孔结构,所述小孔结构与模拟回波光源之间的距离为h,小孔结构直径q≤2·tan(0.15mil)·f。
36、优选地,所述平行光管包括面型为抛物面的主反射镜和面型为双曲面的次反射镜,所述光敏二极管位于次反射镜接近中心轴位置;主反射镜的口径dm为平行光管直径,平行光管直径d=100mm;主反射镜的口径dm与次反射镜口径dm之比为中心遮拦,中心遮拦=32%;平行光管焦距f=1000mm;工作距离=120mm。
37、本发明的有益技术效果是,能够在车载观瞄系统原位不拆卸条件下,实现光轴平行性检测,满足小型化、便携化的检测要求。
- 还没有人留言评论。精彩留言会获得点赞!