割草机回充电桩的方法与流程
本发明涉及园艺设备,尤其涉及割草机回充电桩的方法。
背景技术:
1、割草机回充电桩的技术方案主要包括实时获取小车相对于充电桩的位姿关系、设计特定标志的充电桩、使用车载相机获取图像、检测关键点并计算相对位姿、以及利用光源和新型检测算法确保在各种环境下都能有效执行,常规的检测图像中矩形的角点方法大致流程为:将获取的图像转换为灰度图,使用如canny等边缘检测算法检测图像中的边缘,然后使用霍夫变换检测直线,然后遍历检测出的直线,并获取矩形(四边形)的四个角点,这一套基本方法相对简单,使用起来十分方便,但是它也存在不少缺点,如:误检、适应场景相对狭窄等,所谓的误检主要指,图像中非标志角点,被检测为标志角点,所谓的场景适应性问题主要指漏检,在光线昏暗、标志物区域镜面反射,以及运动拖影等情形都会造成漏检。
技术实现思路
1、本发明的目的是为了解决上述背景技术中提出的技术问题。
2、本发明采用了如下技术方案:割草机回充电桩的方法,包括以下步骤:
3、s1:充电桩特征设计,设计带有特定标志的充电桩,确定充电桩标志及其特征,以便图像识别关键点;
4、s2:相机图像采集,车载相机实时获取充电桩图像,确保相机稳定采集充电桩标志图像,覆盖不同光照和角度;
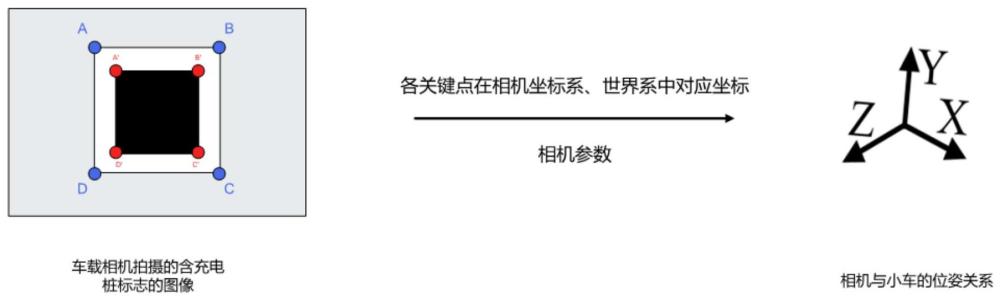
5、s3:关键点检测,从图像中检测充电桩标志的关键点,开发算法以识别并定位“回”形标志的关键点,获取它们在相机坐标系中的位置;
6、s4:世界坐标定义,定义关键点在世界坐标系中的三维位置,根据充电桩特征和布置,确定关键点在真实世界中的三维坐标;
7、s5:相机位姿计算,利用关键点和相机参数计算相机与充电桩的相对位姿,结合相机内外参数和关键点在相机坐标系中的位置,计算相机和充电桩的相对位姿;
8、s6:小车位姿计算,根据相机与充电桩的位姿,计算小车相对于充电桩的位姿,利用车辆的尺寸和几何特征,结合相机测量的位姿,计算小车与充电桩的相对位置;
9、s7:位姿指引,根据当前位姿关系,设计控制策略,将计算出的位姿关系转化为具体的控制指令,引导小车回到充电桩位置;
10、s8:误检减少,改进关键点检测算法,例如引入更复杂的形状或内外八个角点的检测,减少图像中关键点误检的问题;
11、s9:适应性增强,设计自发光标志或增强算法,使其在光线昏暗、镜面反射、夜间等情况下也能准确识别标志物,增强系统对各种场景的适应能力。
12、较佳的,所述s1中的具体步骤为:
13、s101:确定设计充电桩标志的形状和特定特征;
14、s102:定义标志的唯一性,以确保在不同环境条件下识别准确;
15、s103:确定标志的尺寸和颜色范围,以便在各种情况下有效识别。
16、此处,有助于抵抗光照变化和环境噪声,提高系统的稳定性。
17、较佳的,所述s2中的具体步骤为:
18、s201:确保车载相机稳定固定在车辆上,以获得清晰的充电桩图像;
19、s202:开发实时图像采集系统,适应不同光照条件和视角;
20、s203:考虑使用多摄像头系统,以覆盖车辆周围的全方位视野。
21、此处,提高系统的全局感知能力,有助于更精确地定位充电桩。
22、较佳的,所述s3中的具体步骤为:
23、s301:制定算法以检测充电桩标志的角点和关键特征;
24、s302:考虑使用机器学习方法,如神经网络,提高关键点检测的准确性;
25、s303:实施实时监测系统,确保及时更新关键点的位置信息。
26、此处,有助于应对充电桩位置的动态变化,保持系统的精准性。
27、较佳的,所述s4中的具体步骤为:
28、s401:根据充电桩特征和布置,确定关键点在真实世界中的坐标;
29、s402:考虑使用定位技术,如gps,提高关键点在世界坐标系中的准确性;
30、s403:确保坐标定义与车辆和充电桩的实际尺寸相匹配。
31、此处,有助于消除尺寸误差,提高系统的精准性。
32、较佳的,所述s5中的具体步骤为:
33、s501:整合相机内外参数,以准确计算相机与充电桩的相对位姿;
34、s502:优化位姿计算算法,考虑图像畸变和相机姿态变化;
35、s503:实时更新相机位姿信息,以适应车辆运动和环境变化。
36、此处,有助于适应车辆运动和环境变化,确保系统能够实时反映相机的位置。
37、较佳的,所述s6中的具体步骤为:
38、s601:利用车辆的几何特征,结合相机测量的位姿,计算小车与充电桩的相对位置;
39、s602:确保考虑车辆运动学和动力学,提高位姿计算的准确性;
40、s603:实施实时反馈系统,及时更新小车位姿信息。
41、此处,有助于提高定位精度,确保导航准确性。
42、较佳的,所述s7中的具体步骤为:
43、s701:设计控制策略,将计算出的位姿关系转化为具体的控制指令;
44、s702:优化控制算法,考虑车辆动态响应和环境干扰;
45、s703:实施紧急停车和避障机制,确保安全导航到充电桩。
46、此处,确保准确导航到充电桩,保障系统安全性。
47、较佳的,所述s8中的具体步骤为:
48、s801:改进关键点检测算法,引入更复杂的形状或内外八个角点的检测;
49、s802:考虑使用深度学习方法,通过大量数据训练模型减少误检;
50、s803:实施动态调节阈值的机制,以适应不同场景和光照条件。
51、此处,有助于提高检测稳定性。
52、较佳的,所述s9中的具体步骤为:
53、s901:设计自发光标志或增强算法,以提高在光线昏暗、镜面反射、夜间等情况下的识别性能;
54、s902:考虑引入多传感器信息,如激光雷达或红外线传感器,增强系统适应性;
55、s903:定期更新系统,以适应新的环境条件和技术进展。
56、此处,有助于提高充电桩识别的鲁棒性,保持系统的先进性和适应性。
57、与现有技术相比,本发明的优点和积极效果在于:
58、1、本发明中,通过设计新方案和充电桩标志,以及建立大规模数据集进行训练,系统在各种条件下都能稳定地识别充电桩标志,提高了导航系统的可靠性;创新的检测方法和充电桩设计使系统适应性更广泛,不仅可以在白天,而且在夜间、昏暗条件下也能有效运行,增加了系统的实用性;通过使用车载相机和精确的相机参数,系统能够在较远距离内获取充电桩标志,从而在更大范围内实现导航。
59、2、本发明中,使用简单的硬件,如车载相机和自发光的充电桩标志,降低了系统的制造成本,提高了可实施性。
- 还没有人留言评论。精彩留言会获得点赞!