一种弹性支撑的多环MEMS陀螺仪
本发明属于陀螺仪,具体涉及一种弹性支撑的多环mems陀螺仪。
背景技术:
1、陀螺仪是用于测量物体相对于惯性空间角运动的惯性器件,在导航、制导和控制等领域广泛应用。陀螺仪按工作原理可分为转子陀螺仪、光学陀螺仪、振动陀螺仪、原子陀螺仪。20世纪90年代后,以微机电系统(micro electro mechanical systems,mems)陀螺仪、半球谐振陀螺仪为代表的振动陀螺仪和以核磁共振陀螺仪、原子干涉陀螺仪为代表的原子陀螺仪等新型陀螺仪得到快速发展,陀螺仪技术展开新篇章。
2、微机电系统陀螺仪,具有体积小、功耗低、质量轻、成本低的优势,故其在高精度姿态控制、短时智能设备导航等领域有着广泛的应用前景,采用微/纳米技术将机电系统及电子线路集成到硅片衬底,通过检测振动元件的哥氏加速度实现对角运动的测量。目前问世的高精度mems陀螺主要分为两类,一种是传统的集中质量式陀螺,其工作模态分为驱动模态和检测模态,在外界角速度输入情况下检测模态检测到位移信号。另一种是固体波动陀螺,其工作原理是基于旋转轴对称结构弹性波的惯性效应。环形陀螺是固体波动陀螺中的一种,目前以环形拓扑结构为代表的科氏力振动陀螺正成为该领域的主流技术方案之一。得益于扁平化、紧凑的轴对称结构设计,其驱动模态振型和检测模态振型简并,灵敏度高,且结构简单,逐步成为实用较为广泛的高性能陀螺仪。然而传统的多环mems陀螺仪谐振器与锚点直接连接的结构设计会产生大的能量耗散;且参与到谐振状态的等效质量较小。
技术实现思路
1、本发明的目的在于提供一种末端弹性折叠梁的mems环形陀螺仪,等效质量更大,有更多的质量参与科氏力耦合;谐振结构末端的弹性支撑使更少的能量经由锚点耗散。
2、实现本发明目的的技术解决方案为:
3、本发明与现有技术相比,其显著优点在于:
4、与其他具有中心支撑的对称结构器件相比,末端弹性折叠梁环形陀螺的振动能量集中在内环;分布支撑结构使振动运动与基底解耦,这种解耦减轻了锚点与基板之间的损耗,并防止封装应力传播到振动结构中;在科氏力耦合中,会有更多等效质量参与。
技术特征:
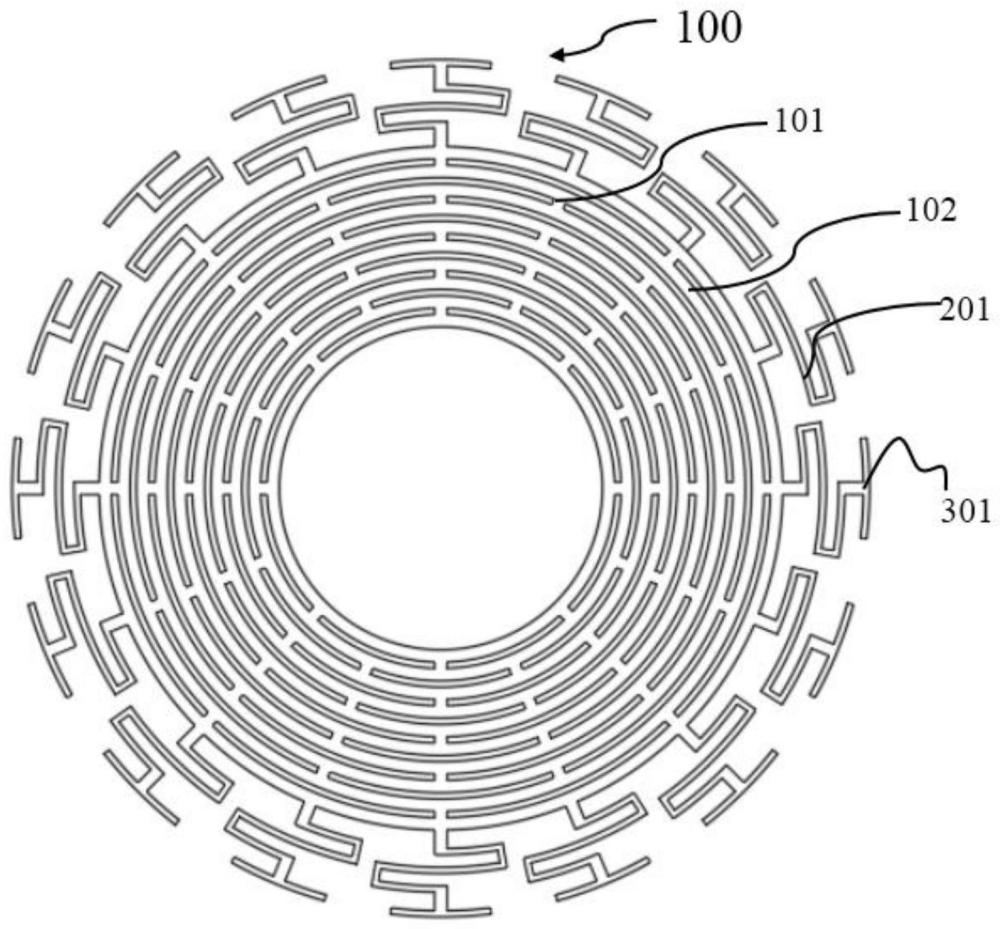
1.一种弹性支撑的多环mems陀螺仪,其特征在于,包括辐条(101)、环形件(102)、柔性折叠梁(201)、设于环形件(102)外侧并通过周向柔性折叠梁(201)连接的锚点(301),位于环形件(102)内侧用于驱动该mems陀螺仪结构沿广义空间上相互成45°夹角的驱动电极和检测电极;
2.根据权利要求1所述的多环mems陀螺仪,其特征在于,柔性折叠梁(201)中心线方向与环形件2θ模态振型波腹方向保持一致,其中,定义谐振器两刚度轴在广义二维平面中的方向分别沿x方向与y方向,当mems陀螺仪处于工作模态时刚度轴因科氏力影响产生角度偏转,定义此偏转角度为θ;。
3.根据权利要求2所述的多环mems陀螺仪,其特征在于,四个驱动电极分别分布在广义二维平面中的0°、90°、180°、270°位置,检测电极分布在45°、135°、225°、315°位置。
4.根据权利要求3所述的多环mems陀螺仪,其特征在于,n为16。
5.根据权利要求4所述的多环mems陀螺仪,其特征在于,柔性折叠梁(201)为折叠梁、双折叠梁、u形梁或双u形梁。
6.根据权利要求5所述的多环mems陀螺仪,其特征在于,折叠梁整体呈“之”字型,包括中部的弧形段、以及设置在弧形段内、外折叠布置的半弧形段,内部半弧形段通过位于辐条延长线上的内连接段和环形件(102)最外环连接,外部半弧形段通过位于辐条延长线上的外连接段和锚点(301)连接。
7.根据权利要求5所述的多环mems陀螺仪,其特征在于,双折叠梁包括两个弧形段和两个半弧形段,两个弧形段一端连接,另一端分别折叠连接内、外半弧形段,内半弧形段通过位于辐条延长线上的内连接段和环形件(102)最外环连接,外部半弧形段通过位于辐条延长线上的外连接段和锚点(301)连接。
8.根据权利要求5所述的多环mems陀螺仪,其特征在于,u形梁包括内、外两个弧形段,两个弧形段两端通过平行于辐条的连接段连接,内弧形段中部通过位于辐条延长线上的内连接段和环形件(102)最外环连接,外弧形段通过位于辐条延长线上的外连接段和锚点(301)连接。
9.根据权利要求5所述的多环mems陀螺仪,其特征在于,双u形梁包括四个弧形段,靠近环形件的两个弧形段的两端通过平行于辐条的连接段连接、形成一个类u型梁,远离环形件的两个弧形段的两端通过平行于辐条的连接段连接,形成一个类u型梁,两个类u型梁通过相邻弧形段中部的位于辐条延长线上的中间连接段连接,最内侧的弧形段通过位于辐条延长线上的内连接段和环形件(102)最外环连接,最外侧的弧形段通过位于辐条延长线上的外连接段和锚点(301)连接。
技术总结
本发明属于陀螺仪技术领域,具体涉及一种弹性支撑的多环MEMS陀螺仪。包括辐条、环形件、柔性折叠梁、设于环形件外侧并通过周向柔性折叠梁连接的锚点,位于环形件内侧用于驱动该MEMS陀螺仪结构沿广义空间上相互成45°夹角的驱动电极和检测电极;若干个环形件通过n个沿环形件周向等间隔分布的辐条连接,环形件最外环的辐条处通过周向柔性折叠梁连接结构旋转对称的n个外锚点,相邻两个柔性折叠梁与环形件中心构成的夹角为360°/n。本发明提供了径向方向的弹性,并且在摆动方向解耦;具有更大的等效质量,使陀螺有更多质量参与科氏力耦合。
技术研发人员:姜波,闫振磊,苏岩
受保护的技术使用者:南京理工大学
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!