一种封闭腔体内物体行程位置的检测方法及系统与流程
本发明涉及火电厂工业封闭腔室内物体行程位置检测领域,尤其是涉及一种封闭腔体内物体行程位置的检测方法及系统。
背景技术:
1、在火电厂工业领域,气动执行机构作为关键的控制装置,在火电厂的运行中扮演着不可或缺的角色。这些机构广泛应用于控制阀门、执行器、和其他关键设备,以确保火电厂的安全运行和高效能发电。特别是在直行程的气动执行机构中,其内部结构在封闭腔室内的实际位置对于整个生产状况至关重要。
2、然而,在实际的火电厂运营中,机械工厂内气动执行机构所处环境的封闭性和复杂性带来了一系列挑战。其中,最显著的挑战之一就是如何有效监测机构的沿程位置。目前,火电厂中通常只能通过安装在末端的红外开关来检测末端极限位置,而对于机构在运动过程中的沿程位置却无法直接获取。这意味着在日常生产过程中,一旦气动执行机构发生卡涩、损坏或其他异常情况,工程师们将无法迅速获取内在结构的准确位置信息,从而无法及时做出响应,导致生产中断、设备故障以及潜在的安全风险。
3、因此,如何有效地监测气动执行机构沿程位置,并且在发生卡涩或损坏等异常情况时能够及时响应,确保设备的正常运行。为解决这一问题,工程师们积极探索各种先进的监测技术和智能控制策略。
4、例如,在封闭腔体内安装高精度的位置传感器,如线性位移传感器或磁编码器,以准确测量气动执行机构的实际位置,或者引入振动传感器或加速度传感器,监测机构的振动情况,提前发现潜在的问题,再建立远程监测和诊断系统,通过将机构的运行数据传输到云端或远程服务器,实现远程实时监测和数据分析。然而,高精度的传感器和先进的监测系统通常会伴随着较高的成本,部署和维护高级监测系统和传感器网络需要专业知识,增加了系统的复杂性,需要培训工作人员适应新的技术,而且传感器在恶劣环境中的长期使用可能面临可靠性问题,例如高温、高湿度等条件可能对设备造成影响。因此,如何降低封闭腔体内物体检测的成本与技术难度,直观清晰的检查内部物体的行程位置,仍然是亟需解决的技术难题。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种封闭腔体内物体行程位置的检测方法及系统。
2、第一方面,本发明提供了一种封闭腔体内物体行程位置的检测方法,该检测方法包括以下步骤:
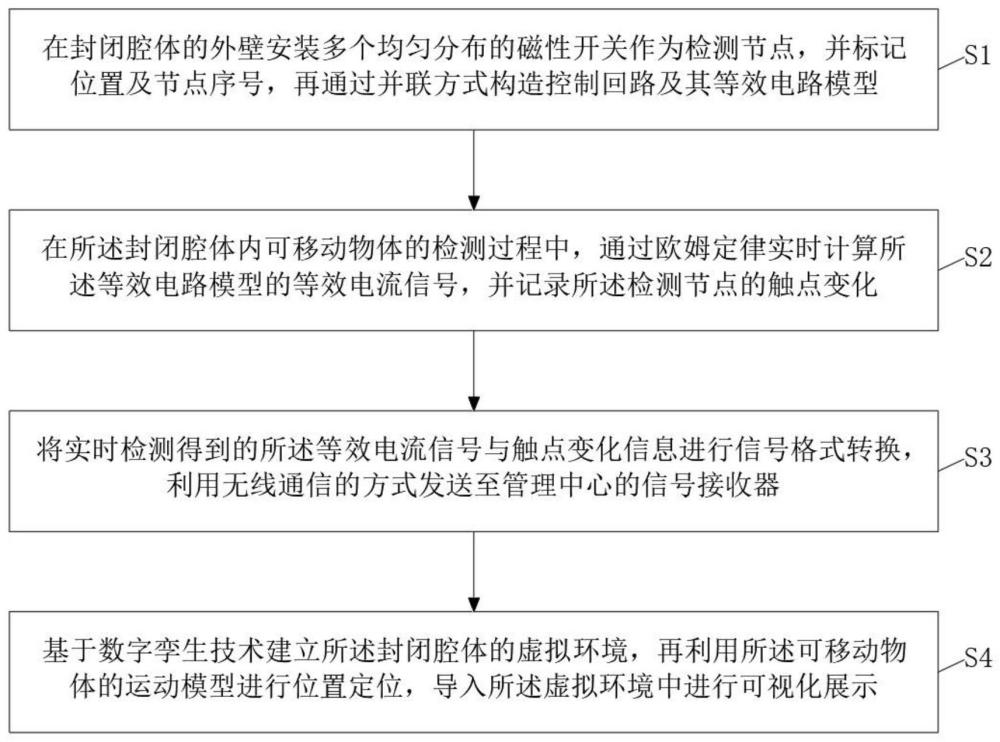
3、s1、在封闭腔体的外壁安装多个均匀分布的磁性开关作为检测节点,并标记位置及节点序号,再通过并联方式构造控制回路及其等效电路模型;
4、s2、在封闭腔体内可移动物体的检测过程中,通过欧姆定律实时计算等效电路模型的等效电流信号,并记录检测节点的触点变化;
5、s3、将实时检测得到的等效电流信号与触点变化信息进行信号格式转换,利用无线通信的方式发送至管理中心的信号接收器;
6、s4、基于数字孪生技术建立封闭腔体的虚拟环境,再利用可移动物体的运动模型进行位置定位,导入虚拟环境中进行可视化展示。
7、进一步的,磁性开关的数量为n,相邻两个磁性开关之间的间距相等,位于两端的两个磁性开关设置在封闭腔体的两个端面,n个磁性开关将封闭腔体划分为m个封闭空间,且m=n-1,并按照节点序号的顺序为每个封闭空间标记空间序号。
8、进一步的,在封闭腔体内可移动物体的检测过程中,通过欧姆定律实时计算等效电路模型的等效电流信号,并记录磁性开关的触点变化包括以下步骤:
9、s21、记录可移动物体在发生移动之前的初始等效电流信号;
10、s22、当可移动物体发生移动时,每经过一个检测节点,该检测节点对应的磁性开关由常开转换为常闭或由常闭转换为常开,此时通过欧姆定律计算等效电路模型的实时等效电流信号;
11、s23、依据实时等效电流信号的数值变化信息,判断当前可移动物体最新经过的检测节点对应的磁性开关的触点变化情况,并记录该检测节点的节点序号,以及当前可移动物体所位于的封闭空间的空间序号。
12、进一步的,磁性开关为利用磁场信号进行控制的线路开关器件,当磁性开关感应到封闭腔体内可移动物体经过时,该磁性开关所引出的触点由常开转换为常闭或者由常闭转换为常开;
13、控制回路为所有磁性开关并联连接形成的闭合回路,再通过配置供电电压以及各个磁性开关的电阻值构造形成等效电路模型。
14、进一步的,基于数字孪生技术建立封闭腔体的虚拟环境,再利用可移动物体的运动模型进行位置定位,导入虚拟环境中进行可视化展示包括以下步骤:
15、s41、利用数字孪生技术在封闭腔体的物理参数的基础上构建数字孪生体,并融合虚拟检测节点与虚拟可移动物体构建形成虚拟环境;
16、s42、利用时间戳信息计算可移动物体的速度,再基于指数平滑预测模型建立可移动物体的运动模型对当前行程位置信息进行预测;
17、s43、将可移动物体的行程位置信息导入虚拟环境中进行可视化展示,再继续计算下一时刻的行程位置信息进行实时动态更新;
18、s44、利用下一个时间戳信息对应的实际位置信息对预测的行程位置信息进行验证,判断可移动物体的行程位置是否符合行程标准。
19、进一步的,利用时间戳信息计算可移动物体的速度,再基于指数平滑预测模型建立可移动物体的运动模型对当前行程位置信息进行预测包括以下步骤:
20、s421、获取无线通信过程中,每一个检测节点发生触点变化的时间戳信息,并按照该检测节点的节点序号标记为对应的触点变化时间;
21、s422、计算最新的触点变化时间与前一个触点变化时间之间的间隔时间,并将间隔时间划分五等份,每等份作为一个移动时刻;
22、s423、基于指数平滑预测模型建立运动模型,对可移动物体的运动趋势进行预测,估算下一个移动时刻时可移动物体的预测位置信息;
23、s424、通过实际速度与预测速度计算预测位置信息的修正权值,再利用修正权值对可移动物体在当前移动时刻的位预测位置信息进行修正,得到最终的行程位置信息。
24、进一步的,基于指数平滑预测模型建立运动模型,对可移动物体的运动趋势进行预测,估算下一个移动时刻时可移动物体的位置信息包括以下步骤:
25、s4231、获取可移动物体进入封闭腔体的初始速度,该初始速度同时为经过第一个检测节点时的速度;
26、s4232、当可移动物体经过当前检测节点时,利用当前触点变化时间与前一个触点变化时间之间的间隔时间,以及两个检测节点之间的封闭空间的长度,计算可移动物体在该封闭空间内的加速度与经过下一个检测节点时的实际速度;
27、s4233、将可移动物体在同一个封闭空间内的运动设定为匀加速运动,按照可移动物体最近经过的检测节点的节点序号及其位置信息,计算可移动物体在各个移动时刻时的位置坐标;
28、s4234、获取可移动物体在前五个移动时刻的位置坐标,设定指数平滑值,建立一次指数平滑计算公式,该计算公式为:
29、
30、式中,表示第t个移动时刻的一次指数平滑值;表示第t-1个移动时刻的一次指数平滑值;yt+1表示第t+1个移动时刻的预测位置;yt表示第t个移动时刻的预测位置;α表示平滑系数;
31、s4235、由一次指数平滑计算公式估算当前移动时刻可移动物体的预测速度,该预测速度的计算公式为:
32、
33、式中,vt表示可移动物体在第t个移动时刻的预测速度;vmax表示可移动物体在前五个移动时刻中的最大速度;(xt,yt)表示可移动物体在第t个移动时刻的位置坐标;(xt-1,yt-1)表示可移动物体在第t-1个移动时刻的位置坐标;
34、s4236、将可移动物体的在当前时刻的预测速度与移动时刻的乘积作为运动距离,估算得到当前时刻可移动物体的预测位置信息。
35、进一步的,通过实际速度与预测速度计算预测位置信息的修正权值,再利用修正权值对可移动物体在当前移动时刻的位预测位置信息进行修正,得到最终的行程位置信息包括以下步骤:
36、s4241、获取由当前触点变化时间与前一个触点变化时间计算得到的当前经过的检测节点的实际速度,再获取由一次指数平滑公式计算得到的当前触点变化时间对应的移动时刻的预测速度,计算该实际速度与该预测速度的夹角;
37、s4242、将夹角的倒数作为预测位置信息的修正权值;
38、s4243、利用修正权值对预测位置信息进行修正,得到当前移动时刻时可移动物体在在封闭腔体内的行程位置信息,修正公式为:
39、
40、式中,(xi,yi)表示可移动物体第i个移动时刻时在封闭腔体内的预测位置信息;(xc,yc)表示可移动物体在封闭腔体内的行程位置信息;n表示移动时刻的数量;wi表示第i个移动时刻对应的修正权值。
41、进一步的,利用下一个时间戳信息对应的实际位置信息对预测的行程位置信息进行验证,判断可移动物体的行程位置是否符合行程标准以下步骤:
42、s441、获取下一个时间戳信息对应的触点变化时间,此时可移动物体的行程位置处于该触点变化时间对应的检测节点处;
43、s442、在预测的行程位置信息中寻找与触点变化时间位于相同时刻的移动时刻,并获取该移动时刻预测得到的行程位置信息,将该行程位置信息与实际的检测节点位置信息进行对比,若两者相差的距离小于标准距离,则判定可移动物体的行程位置预测符合行程标准,若两者相差的距离大于等于标准距离,则判定可移动物体的行程位置预测不符合行程标准,并将此时的检测节点作为初始节点,重新进行位置预测。
44、第二方面,本发明还提供了一种封闭腔体内物体行程位置的检测系统,该检测系统包括:等效电路模型模块、封闭腔体检测模块、无线通信传输模块及定位识别展示模块,其中:
45、等效电路模型模块,用于在封闭腔体的外壁安装多个均匀分布的磁性开关作为检测节点,并标记位置及节点序号,再通过并联方式构造控制回路及其等效电路模型;
46、封闭腔体检测模块,用于在封闭腔体内可移动物体的检测过程中,通过欧姆定律实时计算等效电路模型的等效电流信号,并记录检测节点的触点变化;
47、无线通信传输模块,用于将实时检测得到的等效电流信号与触点变化信息进行信号格式转换,利用无线通信的方式发送至管理中心的信号接收器;
48、定位识别展示模块,用于基于数字孪生技术建立封闭腔体的虚拟环境,再利用可移动物体的运动模型进行位置定位,导入虚拟环境中进行可视化展示。
49、本发明的有益效果为:
50、1、通过磁性开关的均匀分布和标记,实现了对封闭腔体内可移动物体行程位置的高精度监测,利用欧姆定律实时计算等效电路模型的等效电流信号,准确记录了检测节点的触点变化,提高了检测的精准性;引入数字孪生技术,通过建立虚拟环境和运动模型,实现了对物体位置的实时定位,为操作人员提供了直观而准确的信息,有助于智能决策和系统优化,进而提高监测准确性、实现远程管理,为工业领域的智能监测与管理提供了先进而可行的解决方案。
51、2、通过数字孪生技术构建封闭腔体的虚拟环境,能够准确模拟实际物理参数,为后续的位置定位提供真实可信的基础,整合虚拟检测节点与虚拟可移动物体,实现了对实际环境中物体运动的全方位模拟,提高了虚拟环境的仿真精度,通过时间戳信息计算可移动物体的速度,并应用指数平滑预测模型建立运动模型,实现对行程位置的准确预测,为实时位置定位提供了高效手段,为工业领域的实时监测、远程操作以及智能决策提供了先进而有效的技术手段。
- 还没有人留言评论。精彩留言会获得点赞!