基于汽车车身点云特征的车身高度差检测方法与系统
本发明涉及一种汽车检测领域的方法和装置,更具体的说,它是一种基于汽车车身点云特征的车身高度差检测方法与系统。
背景技术:
1、汽车车身高度差检测是汽车检测任务的重要项目之一,在汽车使用过程中,确保车身的平整度和对称性是保证整体质量和安全性的关键因素。因此,对于左右对称零件,如车灯、车镜等之间的高度差进行精确检测和测量至关重要。传统的手工检测方式精度和速度都较低,机械式接触测量方法又容易对汽车零部件表面造成损伤,随着三维点云采集技术的快速发展,点云数据成为对汽车形状和结构的非接触式测量的重要方式之一。然而,仅仅获取汽车点云数据并不足以获得汽车车身左右高度差的详细信息。因此,需要进一步对复杂的汽车点云数据进行分析和处理,以提取车身高度差相关的零部件点云特征信息。为了能充分利用获取的汽车点云数据中的视点特征信息并实现汽车车身左右高度差的非接触,高精度检测,设计了基于汽车车身点云特征的车身高度差检测方法与系统。
技术实现思路
1、本发明针对解决在汽车检测领域中,现有的汽车车身左右高度差检测中存在的检测精度低、检测速度慢、接触式测量可能造成汽车车身零部件表面划伤等问题,提出了一种基于汽车车身点云特征的车身高度差检测方法与系统,实现对汽车车身左右高度差的非接触,高精度,全自动检测。该系统主要由三部深度相机、三个相机支架构成,通过放置在检测线左右两侧和检测线正前方的深度相机获取汽车车身点云,然后对汽车点云数据进行处理获得准确度高的汽车车身左右高度差检测结果。
2、结合说明书附图,本发明采用如下技术方案予以实现:
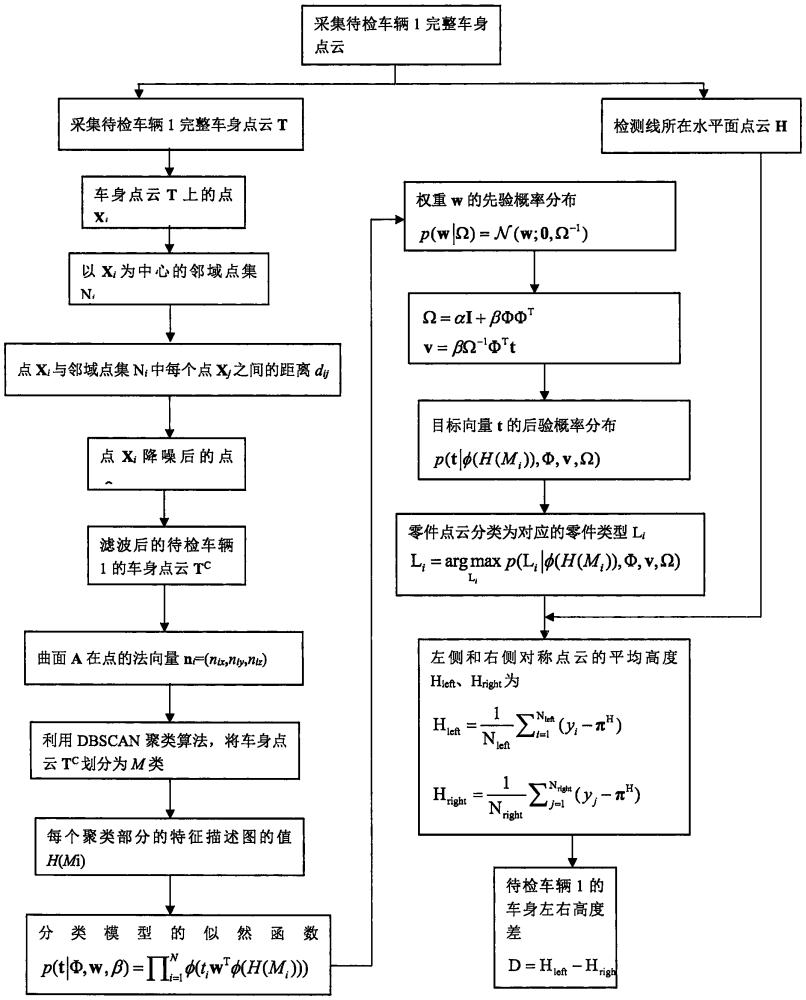
3、基于汽车车身点云特征的车身高度差检测方法的具体步骤如下:
4、第一步:采集待检车辆的完整车身点云和检测基准面点云:
5、将第一相机支架放置在检测线正前方的拍摄位置,第二相机支架、第三相机支架对向放置在检测线两侧的拍摄位置,第一深度相机固定在第一相机支架上,第二深度相机固定在第二相机支架上,第三深度相机固定在第三相机支架上,打开第一深度相机、第二深度相机和第三深度相机,开始采集待检车辆的完整车身点云和检测线地面所在水平面的点云,接受到开始信号后,驾驶员驾驶待检车辆从检测线起点以2~4km/h的速度,匀速行驶通过检测线,待检车辆通过检测线后,检测系统获取得到完整的待检车辆的车身点云t以及检测线所在水平面点云h,利用最小二乘法拟合得到检测线所在水平面点云h所在的平面πh,πh即为检测基准面;
6、第二步:对采集得到的完整车身点云的不同零部件进行特征提取:
7、对第一步获取得到的完整的待检车辆的车身点云t上的点xi,使用k近邻算法选取以xi为中心的邻域点集ni,其中包括xi自身和其周围的k个最近邻点,计算点xi与邻域点集ni中每个点xj之间的距离dij为
8、
9、其中,(xi,yi,zi)是点xi的坐标,(xj,yj,zj)是点xj的坐标;
10、根据车身点云t上的点xi、邻域点集ni中每个点xj和上式得到的距离dij,利用基于统计分析的高斯滤波算法得到点xi降噪后的点为
11、
12、其中,是点xi与邻域点集ni中每个点xj之间的权重,σ是高斯滤波算法的协方差参数,降噪后的点构成了滤波后的待检车辆的车身点云tc;
13、对上式得到的滤波后车身点云tc中的每个点使用它周围的k个最近邻点利用最小二乘法拟合其所在曲面a为
14、
15、利用svd方法对a进行特征值分解,得到特征值λ1≤λ2≤λ3,最小特征值λ1对应的特征向量即为曲面a在点的法向量ni=(nix,niy,niz)
16、将上式获得的车身点云tc中每个点的法向量ni作为特征向量,利用dbscan聚类算法,将车身点云tc划分为m类,对于每个聚类部分mi,选择每个点的法向量ni的x分量nix作为视点特征,然后根据点云数据的分布自适应地确定离散化特征空间的区间数q,将每个点的法向量ni的x分量nix根据离散化区间进行分配,使用以下函数确定点的归属区间为
17、
18、其中,q1,q2,...,qq为区间边界值,是确定区间数q后,根据nix数据的变化范围和密度分布确定的,所有点确定归属区间后,统计每个离散区间内点的数量mq,并按以下公式确定每个聚类部分的特征描述图的值h(mi)
19、
20、其中,nt为车身点云tc中总点数,对于每个聚类部分mi使用上式获得的h(mi)作为其对应零件的特征描述;
21、第三步:对汽车点云中的左右对称部位零件进行识别与分类:
22、将第二步获得的特征描述h(mi)输入分类模型以下的似然函数,则
23、
24、其中,目标向量t为类别标签li的二元编码,类别标签li表示每个聚类部分是左侧或右侧对称部位的某类零部件,φ为基础函数,φ为基础函数矩阵,w为模型的权重向量,β为误差精度;
25、权重w的先验概率分布使用高斯分布定义为:
26、
27、其中,ω是权重的协方差矩阵;
28、使用贝叶斯公式计算权重w的后验概率分布为
29、p(w|φ,t,α,β)∝p(t|φ,w,β)p(w|ω)
30、其中,α是超参数;
31、利用以下公式迭代更新权重w的后验概率
32、ω=αi+βφφt
33、v=βω-1φtt
34、其中,i是单位向量,v是权重的后验均值向量;
35、利用以上计算得到的权重w的后验概率分布、权重的后验均值向量v、基础函数φ,基础函数矩阵φ、第二步获得的特征描述h(mi)、权重的协方差矩阵ω、超参数α和误差精度β计算目标向量t的后验概率分布为
36、p(t|φ(h(mi)),φ,v,ω)∝p(t|φ,w,β)p(w|φ,t,α,β)
37、根据上式得到目标向量t的后验概率,选择具有最大后验概率的类别标签,按以下公式将零件点云分类为对应的零件类型li
38、li=arg max p(li|φ(h(mi)),φ,v,ω)
39、第四步:对汽车车身左右对称部位高度差进行计算:
40、根据第三步获得的零件点云对应的零件类型li,建立一个左侧点云集合右侧点云集合在第一步获取的基准面πh的基准下,左侧和右侧对称点云的平均高度hleft、hright为
41、
42、
43、其中,nleft和nright分别表示左侧点云集合和右侧点云集合中的点数yi和yj分别是左侧点云集合和右侧点云集合中每个点在垂直基准面方向的坐标;
44、根据上式得到的左侧平均高度hleft和右侧平均高度hright,得到待检车辆的车身左右高度差d为
45、d=hleft-hright
46、其中,d为正值表示左侧车身较高,负值表示右侧车身较高。
47、基于汽车车身点云特征的车身高度差检测系统包括有第一深度相机、第二深度相机、第三深度相机、第一相机支架、第二相机支架与第三相机支架;
48、将第一相机支架放置在检测线正前方的拍摄位置,第二相机支架、第三相机支架对向放置在检测线两侧的拍摄位置,第一深度相机、第二深度相机和第三深度相机通过底部的螺纹孔分别与第一相机支架、第二相机支架和第三相机支架的螺栓螺纹固定连接。
49、本发明的有益效果是:
50、1.本发明所设计的基于汽车车身点云特征的车身高度差检测方法与系统利用汽车车身点云数据的视点特征等信息,能够精确地对汽车车身左右对称部位的零部件进行识别与分类。通过准确测量这些车身零部件与基准面之间的高度差,可以实现对汽车车身左右高度差的准确测量,提高汽车检测的准确度。
51、2.本发明所设计的基于汽车车身点云特征的车身高度差检测方法与系统相比传统的目视检查和机械测量方法,充分利用点云技术快速获取汽车三维数据,并通过自动化的识别和分类方法快速定位和测量汽车车身的对称零部件。提高了汽车车身高度差检测的效率,节省了时间和人力成本。
52、3.本发明所设计的基于汽车车身点云特征的车身高度差检测方法与系统不受检测人员主观因素的影响,提供了更客观和可靠的测量结果。通过基准面和高度差的计算,可以得到准确的数值化结果,为汽车检测提供了客观的结论,使得车身的对称性和汽车行驶安全性得以保证,并对点云技术在汽车检测领域的广泛应用和汽车尺寸参数的精确测量产生了有益效果。
- 还没有人留言评论。精彩留言会获得点赞!