一种车道定位方法、装置、电子设备及存储介质与流程
本申请主要涉及自动驾驶,尤其涉及一种车道定位方法、装置、电子设备及存储介质。
背景技术:
1、随着智能驾驶技术的不断发展,用户对于车辆定位的精确性也越来越高,车道级定位已经成为高精度定位的必然需求。高精度定位的精度一般在分米级甚至是厘米级,能够为车辆提供较高精度的定位结果。
2、车辆在开启自动驾驶功能,需要进行变道等操作时,通常需要先确定车辆当前所处的车道,然后再进行变道策略等。因此,车道级定位在自动驾驶中有着不可或缺的重要作用。
3、相关技术中,大多通过车载传感器的实时数据与高精地图特征相结合实现高精度的车道级定位。但是,目前的高精地图的建图维护成本高,场景覆盖度较低,故而,基于高精地图的高精度车道级定位方案难以进行大规模应用。
4、因此,如何实现不依赖于高精地图的高精度车道级定位,是目前亟需解决的问题。
技术实现思路
1、本申请提供了一种车道定位方法、装置、电子设备及存储介质,用以根据车辆传感器信号实现高精度的车道级定位。
2、第一方面,本申请提供了一种车道定位方法,包括:
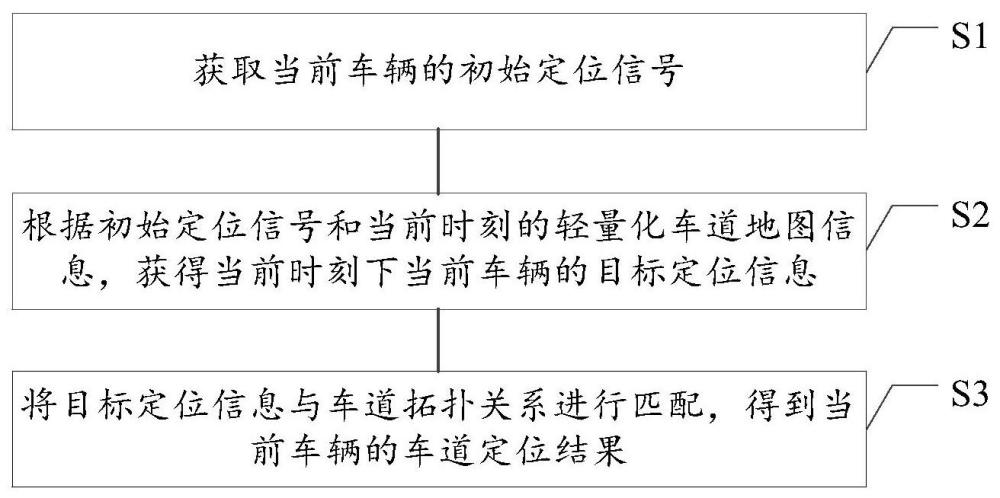
3、获取当前车辆的初始定位信号;其中,初始定位信号用于指示当前车辆的当前行驶方向;
4、根据初始定位信号和当前时刻的轻量化车道地图信息,获得当前时刻下当前车辆的目标定位信息;其中,目标定位信息用于指示当前时刻下当前车辆所处的车道组。
5、在一种可选的实施方式中,在将目标定位信息与车道拓扑关系进行匹配,得到当前车辆的车道定位结果之前,还包括:
6、获取传感器设备采集的感知数据;
7、基于感知数据构建当前时刻对应的车道拓扑关系。
8、在一种可选的实施方式中,基于感知数据构建当前时刻对应的车道拓扑关系,包括:
9、对感知数据进行处理,得到每个车道的车道线信息和车道属性信息;其中,车道线信息包括车道线的斜率、曲率、车道线类型,车道属性信息包括车道线的宽度、车道线的几何排布、转向信息和道路边缘信息;
10、基于相邻车道的车道属性信息和车道线信息构建当前时刻对应的车道拓扑关系。
11、在一种可选的实施方式中,将目标定位信息与车道拓扑关系进行匹配,得到当前车辆的车道定位结果,包括:
12、分别获取轻量化车道地图信息下和车道拓扑关系下的车道感知结果;
13、采用预设算法计算当前车辆在车道拓扑关系各个车道下的匹配得分;
14、将匹配得分进行排序,确定出两个匹配得分最大的第一匹配得分和第二匹配得分;
15、若第一匹配得分和第二匹配得分的比值大于预设阈值,则将第一匹配得分对应的车道作为当前车辆的车道定位结果。
16、第二方面,本申请提供了一种车道定位装置,包括:
17、获取模块,用于获取当前车辆的初始定位信号;其中,初始定位信号用于指示当前车辆的当前行驶方向;
18、处理模块,用于根据初始定位信号和当前时刻的轻量化车道地图信息,获得当前时刻下当前车辆的目标定位信息;其中,目标定位信息用于指示当前时刻下当前车辆所处的车道组;
19、匹配模块,用于将目标定位信息和车道拓扑关系进行匹配,得到当前车辆的车道定位结果。
20、在一种可选的实施方式中,在将目标定位信息与车道拓扑关系进行匹配,得到当前车辆的车道定位结果之前,所述处理模块还用于:
21、获取传感器设备采集的感知数据;
22、基于感知数据构建当前时刻对应的车道拓扑关系。
23、在一种可选的实施方式中,在基于感知数据构建当前时刻对应的车道拓扑关系时,所述处理模块具体用于:
24、对感知数据进行处理,得到每个车道的车道线信息和车道属性信息;其中,车道线信息包括车道线的斜率、曲率、车道线类型,车道属性信息包括车道线的宽度、车道线的几何排布、转向信息和道路边缘信息;
25、基于相邻车道的车道属性信息和车道线信息构建当前时刻对应的车道拓扑关系。
26、在一种可选的实施方式中,在将目标定位信息与车道拓扑关系进行匹配,得到当前车辆的车道定位结果时,所述匹配模块具体用于:
27、分别获取轻量化车道地图信息下和车道拓扑关系下的车道感知结果;
28、采用预设算法计算当前车辆在车道拓扑关系各个车道下的匹配得分;
29、将匹配得分进行排序,确定出两个匹配得分最大的第一匹配得分和第二匹配得分;
30、若第一匹配得分与第二匹配得分的比值大于预设阈值,则将第一匹配得分对应的车道作为当前车辆的车道定位结果。
31、第三方面,本申请提供了一种电子设备,包括:
32、存储器,用于存放计算机程序;
33、处理器,用于执行所述存储器上所存放的计算机程序时,实现上述的一种车道定位方法的步骤。
34、第四方面,本申请提供了一种计算机可读存储介质,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现上述的一种车道定位方法的步骤。
35、通过本申请实施例的上述一个或多个实施例中的技术方案,本申请实施例至少具有如下有益效果:
36、在本申请实施例所提供的车道定位方法中,首先获取当前车辆的初始定位信号;通过初始定位信号确定当前车辆当前的行驶方向;然后根据初始定位信号和当前时刻的轻量化车道地图信息,获得当前时刻下当前车辆的目标定位信息,从而确定出当前车辆在道路中行驶时所处的车道组;最后,将目标定位信息与车道拓扑关系进行匹配,得到当前车辆的车道定位结果。采用这种方式,避免了现有技术中高精地图的建图维护成本高,场景覆盖度低的问题,充分利用车辆现有的传感器信号与轻量化车道地图进行车道级定位,能够降低建图维护成本,提高定位精度。
37、上述第二方面至第四方面中的各个方面以及各个方面可能达到的技术效果请参照上述针对第一方面及第一方面中的各种可能方案可以达到的技术效果说明,这里不再重复赘述。
技术特征:
1.一种车道定位方法,其特征在于,所述方法包括:
2.如权利要求1所述的方法,其特征在于,在所述将所述目标定位信息与车道拓扑关系进行匹配,得到所述当前车辆的车道定位结果之前,还包括:
3.如权利要求2所述的方法,其特征在于,所述基于所述感知数据构建当前时刻对应的车道拓扑关系,包括:
4.如权利要求1所述的方法,其特征在于,所述将所述目标定位信息与车道拓扑关系进行匹配,得到所述当前车辆的车道定位结果,包括:
5.一种车道定位装置,其特征在于,所述装置包括:
6.如权利要求5所述的装置,其特征在于,在将所述目标定位信息与车道拓扑关系进行匹配,得到所述当前车辆的车道定位结果之前,所述处理模块还用于:
7.如权利要求6所述的装置,其特征在于,在所述基于所述感知数据构建当前时刻对应的车道拓扑关系时,所述处理模块具体用于:
8.如权利要求5所述的装置,其特征在于,在所述将所述目标定位信息与车道拓扑关系进行匹配,得到所述当前车辆的车道定位结果时,所述匹配模块具体用于:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现权利要求1-4任一项所述的方法。
技术总结
本申请公开了一种车道定位方法、装置、电子设备及存储介质,涉及自动驾驶技术领域,用以根据传感器信号实现高精度的车道级定位,该方法包括:首先,获取当前车辆的初始定位信号;然后,根据初始定位信号和当前时刻的轻量化车道地图信息,获得当前时刻下当前车辆的目标定位信息;最后将目标定位信息与车道拓扑关系进行匹配,得到当前车辆的车道定位结果。通过上述方法,避免了使用高精地图进行车道定位,利用车辆传感器设备和轻量化车道地图实现了车道级定位,提高了车道定位的精度。
技术研发人员:请求不公布姓名,彭伟,请求不公布姓名
受保护的技术使用者:合众新能源汽车股份有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!