一种提高激光雷达探测性能的方法与流程
本发明涉及激光雷达和信号处理,尤其涉及一种提高激光雷达探测性能的方法。
背景技术:
1、激光雷达是以激光作为信息载波,以光电探测器为接收器件,以光学望远镜为发射与接收天线,通过信号处理与数据反演,实现对目标探测的雷达(radar)系统,其组成框图如图1所示。如图1所示的激光雷达(radar)系统的具体工作过程如下:
2、1、通电后,如图1所示,雷达综合控制分系统以固定频率(f),固定脉宽(t1)向激光发射分系统发出周期性触发信号,激光发射分系统收到信号后,发出一束激光(频率fopt,宽度与脉冲相同),经发射天线发射到空气中。
3、2、如图2所示的是雷达激光周期性触发信号()的时域图,激光在发射出来后,经过发射天线(望远镜镜头)反射(t2时隙),空气气溶胶(或其它移动目标物体)反射(t3+t4时隙),由接收天线(望远镜)接收到反射信号,由于气溶胶(或其它移动目标物体)是以一定的速度(可以是静止)移动,故产生多普勒效应,即产生多普勒频移fd(可以为零,即静止物体),反射的激光信号的频率为fopt+fd,由探测接收分系统接收到,并传递给信息处理分系统。
4、3、信息处理分系统收到反射的激光信号后,经拍频(混频)放大滤波等信号处理得到多普勒频移fd,根据多普勒公式计算出气溶胶(或其它移动目标物体)的径向速度,同时根据反射回来的时间和光速,计算出气溶胶(或其它移动目标物体)的径向距离。进而根据激光的俯仰角、方位角等参数计算出气溶胶(或其它移动目标物体)的水平速度、方向、垂直速度、水平距离、垂直距离等数值。
5、通过上述流程,激光雷达就完成了对气溶胶(或其它移动目标物体)的速度、距离相关参数的探测。
6、但是,由于激光的反射信号十分微弱,往往淹没在噪声里,必须进行信号处理来获得较高的snr(snr:信号噪声比,即信噪比),才能获得多普勒频移的频率(如图2中t2+t3),snr太低,则不能获得多普勒频移的频率(如图2中t4部分)。噪声由雷达系统噪声和环境噪声组成。为降低噪声,需提取噪声进行分析、抵消、建模,特别是环境噪声随环境的变化而变化,如天气、烟雾等等。如何提取真实的实时噪声对信号处理极其重要。
7、现有激光雷达技术不能实时跟踪环境变化提取噪声。激光雷达是以触发信号作为工作启动和工作节奏,雷达系统噪声相对恒定而容易提取;由于环境经常变化,环境噪声往往不提取,故在信号处理时只处理雷达系统噪声,即只处理部分噪声。若能将环境噪声与雷达系统噪声都提取,则信号处理的效果会更好,雷达的性能会得到提高。
8、为此,需要设计一种在对雷达系统噪声进行提取的同时,还能有效将环境噪声进行提取的方法。
技术实现思路
1、本发明所要解决的技术问题是克服现有技术的不足,提供一种通过利用低于可检测最小输出信噪比(检测因子)时隙提取实时环境噪声(含激光雷达系统噪声,以下均称环境噪声)来对后续周期内的回波信号进行处理,有效地提高信噪比,进而提高激光雷达的探测距离和性能的方法。
2、本发明所采用的技术方案是,本发明方法在激光雷达上实现,该方法包括以下步骤:
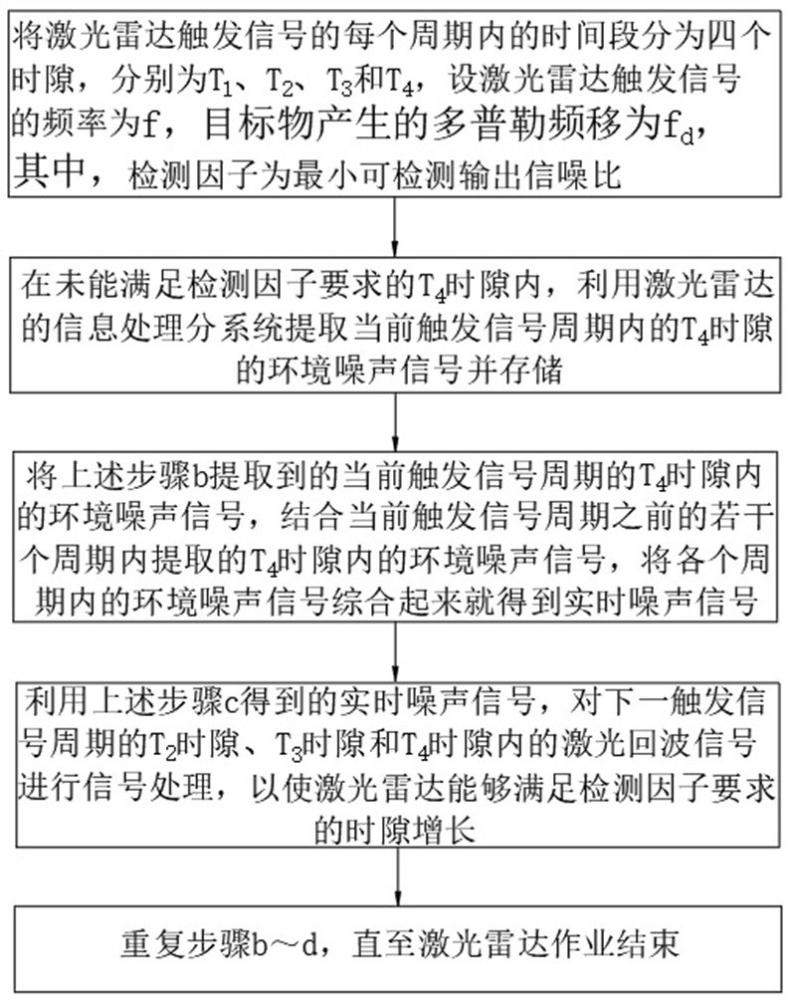
3、a. 将激光雷达触发信号的每个周期分为四个时隙,分别为t1、t2、t3和t4时隙,其中,t1为激光雷达触发激光发射的时隙;t2为激光从激光雷达的发射天线反射出来后直接到达激光雷达的接收天线的时隙;t3为激光反射信号从目标物反射回接收天线的时隙,该时隙以激光雷达正好能满足检测因子要求作为截止时间点,t4时隙为t3时隙截止时间点至激光雷达下一周期信号触发前的时隙,设激光雷达触发信号的频率为f,目标物产生的多普勒频移为fd,其中,检测因子为最小可检测输出信噪比;
4、b. 在未能满足检测因子要求的t4时隙内,利用激光雷达的信息处理分系统提取当前触发信号周期内的t4时隙的环境噪声信号并存储;
5、c. 将上述步骤b提取到的当前触发信号周期的t4时隙内的环境噪声信号,结合当前触发信号周期之前的若干个周期内提取的t4时隙内的环境噪声信号,将各个周期内的环境噪声信号综合起来就得到实时噪声信号;
6、d. 利用上述步骤c得到的实时噪声信号,对下一触发信号周期的t2时隙、t3时隙和t4时隙内的激光回波信号进行信号处理,以使激光雷达能够满足检测因子要求的时隙增长;
7、e. 重复步骤b~d,直至激光雷达作业结束。
8、进一步地,所述步骤b中,利用激光雷达的信息处理分系统提取当前触发信号周期内的t4时隙的环境噪声信号的具体步骤为:将t4时隙分为前部时隙和后部时隙,舍弃前部时隙提取到的信号,采集后部时隙的信号,该信号转换成电信号后,进行模数转换,得到噪声数据信号,该噪声数据信号即为当前触发信号周期内的t4时隙的环境噪声信号。
9、再进一步地,将t4时隙分为前部时隙和后部时隙的时间点为1/2的t4时隙时间点。
10、此外,所述步骤c中,将各个周期内的环境噪声信号综合起来求平均值,即得到实时噪声信号。
11、另外,所述步骤d中,对下一触发信号周期的t2时隙、t3时隙和t4时隙内的激光回波信号进行信号处理,以使激光雷达能够满足检测因子要求的时隙增长的具体步骤为:将t2时隙内获得的信号舍弃,对t3时隙的整个时隙和t4时隙的前部时隙的激光回波信号进行自适应滤波操作,使t4时隙靠近t3时隙的部分时间内的信噪比满足检测因子的要求,使得t3时隙增长。
12、更加具体地,所述步骤b中,信息处理分系统对t4时隙的环境噪声信号采用自动覆盖的方式进行存储,以使存储的是最新的噪声数据。
13、所述步骤a中,所述检测因子的定义为最小检测信噪比。
14、在本发明中,所述激光雷达包括电源分系统、雷达综合控制分系统、激光发射分系统、发射天线、接收天线、探测接收分系统、信息处理分系统、通信分系统、扫描伺服控制分系统及辅助部件,所述电源分系统为整个激光雷达供电,所述激光发射分系统、发射天线、接收天线、探测接收分系统、信息处理分系统、通信分系统、扫描伺服控制分系统及辅助部件均与所述雷达综合控制分系统信号连接,所述发射天线与所述激光发射分系统信号连接,所述接收天线与所述探测接收分系统信号连接,所述信息处理分系统内设置有存储模块。
15、更加具体地,所述发射天线和所述接收天线均为望远镜。
16、本发明的有益效果是:本发明中,通过在激光雷达信噪比过低的时隙(t4)内,提取该时隙内的环境噪声信号,以获取周期内各个时隙的实际噪声信号;将各周期内的噪声信号综合起来就得到实时噪声信号,进而结合得到的实时噪声信号,对下一周期的激光发射信号时隙(t2、t3和t4前部时隙)的噪声信号进行处理(如自适应滤波进行噪声抵消等),以获得更高的信噪比,进而使得激光回波信号的有效时隙更长,由此即可提高激光探测的距离,由此提高激光雷达的探测性能。
技术特征:
1.一种提高激光雷达探测性能的方法,该方法在激光雷达上实现,其特征在于,该方法包括以下步骤:
2.根据权利要求1所述的一种提高激光雷达探测性能的方法,其特征在于,所述步骤b中,利用激光雷达的信息处理分系统提取当前触发信号周期内的t4时隙的环境噪声信号的具体步骤为:将t4时隙分为前部时隙和后部时隙,舍弃前部时隙提取到的信号,采集后部时隙的信号,该信号转换成电信号后,进行模数转换,得到噪声数据信号,该噪声数据信号即为当前触发信号周期内的t4时隙的环境噪声信号。
3.根据权利要求2所述的一种提高激光雷达探测性能的方法,其特征在于,将t4时隙分为前部时隙和后部时隙的时间点为1/2的t4时隙时间点。
4.根据权利要求1所述的一种提高激光雷达探测性能的方法,其特征在于,所述步骤c中,将各个周期内的环境噪声信号综合起来求平均值,即得到实时噪声信号。
5.根据权利要求2所述的一种提高激光雷达探测性能的方法,其特征在于,所述步骤d中,对下一触发信号周期的t2时隙、t3时隙和t4时隙内的激光回波信号进行信号处理,以使激光雷达能够满足检测因子要求的时隙增长的具体步骤为:将t2时隙内获得的信号舍弃,对t3时隙的整个时隙和t4时隙的前部时隙的激光回波信号进行自适应滤波操作,使t4时隙靠近t3时隙的部分时间内的信噪比满足检测因子的要求,使得t3时隙增长。
6.根据权利要求1所述的一种提高激光雷达探测性能的方法,其特征在于,所述步骤b中,信息处理分系统对t4时隙的环境噪声信号采用自动覆盖的方式进行存储,以使存储的是最新的噪声数据。
7.根据权利要求1所述的一种提高激光雷达探测性能的方法,其特征在于,所述激光雷达包括电源分系统、雷达综合控制分系统、激光发射分系统、发射天线、接收天线、探测接收分系统、信息处理分系统、通信分系统、扫描伺服控制分系统及辅助部件,所述电源分系统为整个激光雷达供电,所述激光发射分系统、发射天线、接收天线、探测接收分系统、信息处理分系统、通信分系统、扫描伺服控制分系统及辅助部件均与所述雷达综合控制分系统信号连接,所述发射天线与所述激光发射分系统信号连接,所述接收天线与所述探测接收分系统信号连接,所述信息处理分系统内设置有存储模块。
8.根据权利要求7所述的一种提高激光雷达探测性能的方法,其特征在于,所述发射天线和所述接收天线均为望远镜。
技术总结
本发明旨在提供一种能有效地提高信噪比,进而提高激光雷达的探测距离和性能的提高激光雷达探测性能的方法。本发明方法包括步骤:a.将激光雷达触发信号的每个周期内的时间段分为四个时隙,分别为T<subgt;1</subgt;、T<subgt;2</subgt;、T<subgt;3</subgt;和T<subgt;4</subgt;;b.在未能满足检测因子要求的T<subgt;4</subgt;时隙内,利用激光雷达的信息处理分系统提取当前触发信号周期内的T<subgt;4</subgt;时隙的环境噪声信号并存储;c.将存储的各个周期内的环境噪声信号综合起来就得到实时噪声信号;d.利用得到的实时噪声信号,对下一触发信号周期的T<subgt;2</subgt;时隙、T<subgt;3</subgt;时隙和T<subgt;4</subgt;时隙内的激光回波信号进行噪声处理,以使激光雷达能够满足检测因子要求的时隙增长;e.重复步骤b~d。本发明应用于激光雷达信号处理技术领域。
技术研发人员:赵德平,曹丁象,巨兴斌,杨军,肖虎,刘雄,卢敬光
受保护的技术使用者:珠海光恒科技有限公司
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!