一种混凝土结构实体位置与尺寸偏差的感知与检测系统的制作方法
本发明属于检测,尤其涉及一种混凝土结构实体位置与尺寸偏差的感知与检测系统。
背景技术:
1、建筑工程质量不仅关系到建筑结构本身功能上的安全、适用与耐久,更与国家财产安全、人民生命安全息息相关。施工过程中,施工质量巡检与控制是建筑工程质量管理的关键一环。结构构件实体的位置偏差与尺寸偏差,则是施工质量巡检的重要检测内容。结构位置与尺寸偏差,将突出影响结构的强度与刚度,严重时将使结构在施工或服役期出现失效、倒塌,引发严重事故。
2、传统施工质量巡检,依靠项目管理人员、施工质检人员及施工人员等人工作业。尤其是结构位置与尺寸偏差的检测,需按现场测量、数据记录、偏差分析多个步骤进行。工人通过尺量方式获取现场柱子尺寸数据,通过经纬仪测量方式获取现场柱子位置数据;质检人员通过纸质记录方式记录现场测量数据,包括记录测量地点、测量时间、测量结果等;管理人员结合施工图进行数据分析,识别不合格记录。由于测量速度慢,一般项目待检构件数量庞大,现行规范《混凝土结构工程施工质量验收规范》为国家标准,编号为gb50204-2015,要求对主控项目进行全数检查,对一般项目按楼层、结构缝或施工段划分检验批进行分批抽查10%。低效的检查与无法全覆盖的抽查,无法适应建筑工程行业精细化转型发展对建筑工程质量提出的高要求。
3、近年来,随着大数据、云计算、物联网、人工智能等新兴技术的快速发展,为建筑工程施工过程与运营期间工程质量智能感知以及自动化检测系统的研发提供了契机。目前已见使用的检测系统多为基于激光雷达的检测系统,可实现全覆盖检测。然而激光雷达设备硬件成本高、受天气影响大、对部署环境要求高,在施工现场应用限制条件多,且由于成本与使用的技术门槛等原因不易于大范围推广应用。
4、因此,亟需一种能够实现建筑结构建造与运营期间结构实体位置与尺寸偏差的高效、高精度、自动化识别的系统。
技术实现思路
1、本发明的目的在于:为了克服现有技术问题,公开了一种混凝土结构实体位置与尺寸偏差的感知与检测系统,通过本发明感知与检测系统能够实现建筑结构建造与运营期间结构实体位置与尺寸偏差的高效、高精度、自动化识别。
2、本发明目的通过下述技术方案来实现:
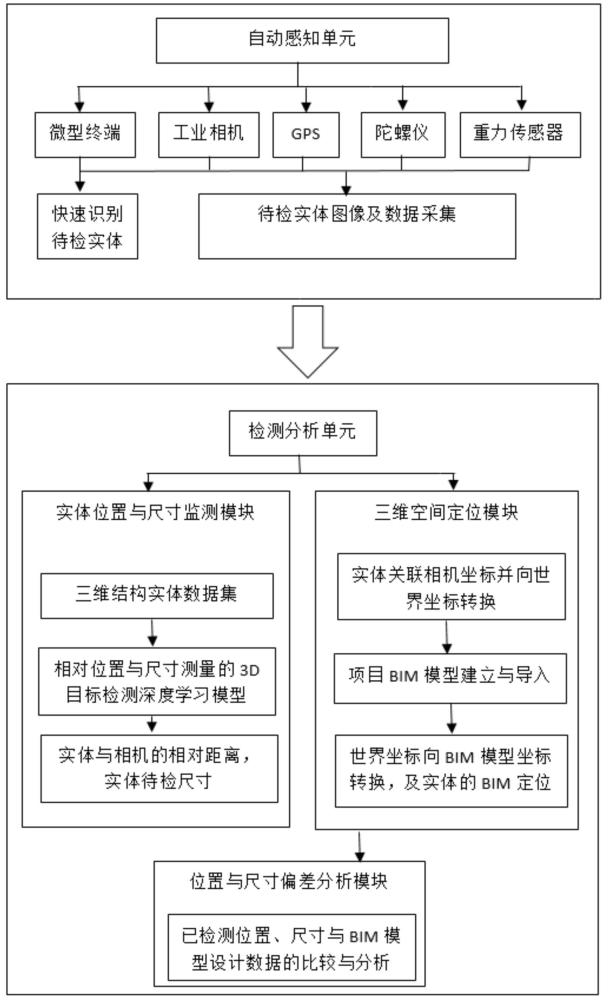
3、一种混凝土结构实体位置与尺寸偏差的感知与检测系统,所述感知与检测系统包括自动感知单元和检测分析单元;
4、所述自动感知单元包括:微型终端及若干探测设备,自动感知单元通过在微型终端嵌入图像识别模块完成待检实体的自动识别,并通过各探测设备采集与待检实体相关的包含图像在内的各类型数据;
5、所述检测分析单元包括:实体位置与尺寸检测模块、三维空间定位模块、位置与尺寸偏差分析模块;
6、其中,所述实体位置与尺寸检测模块被配置为采用随机参数化3d虚拟建模构建数据集,并采用fcos3d目标检测深度学习模型实现实体与相机的相对距离及实体待检尺寸的检测;
7、所述三维空间定位模块被配置为采用bim方法建立项目的三维模型,并利用自动感知单元回传的位置数据实现相机坐标与世界坐标的转换,通过bim模型的项目数据实现世界坐标与bim模型坐标的转换,最终将定位在相机坐标中的实体投射到bim模型中;
8、所述位置与尺寸偏差分析模块被配置为将bim模型数据与实体的检测数据进行比较,实现不合格实体的检出。
9、根据一个优选的实施方式,所述自动感知单元包括:微型终端、工业相机、gps传感器、重力传感器和陀螺仪;
10、所述微型终端与自动感知单元内各设备相连,用于实现数据收集,数据处理,数据传输;所述微型终端内嵌入有包含混凝土柱、混凝土梁、设备基础3种类型的待检结构实体的快速目标识别算法;
11、所述工业相机用于拍摄结构实体图像,gps传感器用于采集拍摄时的位置信息,重力传感器用于采集工业相机拍摄的高度信息,陀螺仪用于采集工业相机的姿态信息。
12、根据一个优选的实施方式,所述微型终端被配置为按照如下进行数据处理:
13、步骤1:以预设频率读取工业相机拍摄图像,调用快速目标识别算法识别是否存在待检结构实体,若为否,则不进行任何操作,若为是,则进行后续步骤;
14、步骤2:调用gps传感器获取拍摄时相机在世界坐标系中的坐标,调用重力传感器获取相机的高度,并以相机位置为原点建立相机坐标系;调用陀螺仪获取相机在世界坐标系中的航偏角,俯仰角和滚转角;
15、步骤3:将工业相机拍摄的图像、gps传感器的位置信息、重力传感器的高度信息以及陀螺仪的姿态信息,传送至检测分析单元。
16、根据一个优选的实施方式,所述实体位置与尺寸检测模块被配置为按照如下步骤进行数据处理:
17、步骤1:建立包含混凝土柱、混凝土梁、设备基础3种类型的待检结构实体的图像数据集,其中,所述图像数据集包括训练验证集与测试集;
18、步骤2:构建fcos3d目标检测深度学习模型,所述fcos3d目标检测深度学习模型包括特征提取部和实体与相机的相对距离及实体待检尺寸的预测部;
19、步骤3:将训练验证集中的数据按预设比例分为训练集和验证集,利用训练集对fcos3d目标检测深度学习模型进行训练,并利用验证集对模型进行评估,得到训练好的模型;利用测试集对fcos3d目标检测深度学习模型的鲁棒性和训练数据的多样性、随机性进行评估;
20、步骤4:将硬件设备实时采集的图像作为输入数据,输入至训练好的fcos3d目标检测深度学习模型,得到采集图像中待检结构实体与相机的相对距离及待检实体三维度尺寸的检测结果。
21、根据一个优选的实施方式,所述图像数据集中的数据包含图像样本、结构实体类别标注和与之匹配的3d信息标注;
22、所述3d信息包括结构实体形心相对相机的位置,结构实体三维度尺寸,结构实体绕自身坐标系中z轴的角度。
23、根据一个优选的实施方式,所述特征提取部包括用于提取图像特征的resnet101骨干网络,和用于采样提取尺度特征的特征金字塔网络,所述特征金字塔网络提取多层特征层,分别用于不同尺度目标的预测;
24、所述预测部包含用于对结构实体进行分类预测的分类分支、center-ness预测分支以及用于预测实体形心位置、实体三维度尺寸和绕自身z轴的角度的回归分支。
25、根据一个优选的实施方式,所述三维空间定位模块被配置为按照如下步骤进行数据处理:
26、步骤1:构建相机坐标系,关联结构实体;
27、步骤2:建立相机坐标系与世界坐标系的转换关系;
28、步骤3:采用bim方法建立检测项目的建筑与结构的建筑信息模型,所述建筑信息模型包含工程项目的建筑与结构三维几何信息及结构实体的分类、命名、轴线定位、构件尺寸;
29、步骤4:建立世界坐标系与bim坐标系的转换关系;
30、其中,所述bim坐标系为bim模型中的笛卡尔坐标系,通过在bim模型中定义项目坐标原点等于真实的项目基点在世界坐标轴中的位置,建立世界坐标系与bim坐标系的转换关系,并利用bim模型建模与管理软件内置坐标转换算法,完成坐标转换;
31、步骤5:建立结构实体在bim模型中的定位方法,设定搜寻范围,以结构实体形心在bim坐标系中的坐标位置为中心,利用碰撞检测算法在bim模型中搜索预设范围内空间区域内的bim构件;
32、若无,则由人工核查与定位;若有且数量为1,则定义该bim构件与结构实体为同一组待分析构件;若有且数量大于1,则定义与结构实体的形心距离最小的bim构件与结构实体为同一组待分析构件。
33、根据一个优选的实施方式,步骤1:构建相机坐标系,关联结构实体具体包括:
34、相机坐标系以相机位置为坐标系原点,x轴、z轴与硬件设备中工业相机所采集图像的宽、高平行,y轴为相机光轴,三维相机坐标表达为;
35、结构实体位置在相机坐标系下即定义为。
36、根据一个优选的实施方式,建立相机坐标系与世界坐标系的转换关系具体包括:
37、世界坐标系的x轴与y轴为gps的坐标轴,z轴定义为重力的相反方向,三维世界坐标表达为;
38、相机坐标系到世界坐标系的变换关系定义为:
39、;
40、式中t为利用相机坐标系原点在世界坐标系中的坐标建立的平移矩阵:
41、;
42、其中,由gps获得;
43、r为利用陀螺仪获取的相机姿态建立的旋转矩阵:
44、。
45、根据一个优选的实施方式,所述位置与尺寸偏差分析模块被配置为按照如下步骤进行数据处理:
46、步骤1:定义位置偏差阈值与尺寸偏差阈值;
47、步骤2:位置偏差分析;取同一组待分析构件,获得结构实体形心在bim坐标系中的坐标位置,以及同组bim构件的形心坐标,计算形心位置偏差;
48、当形心位置偏差小于位置偏差阈值时,结构实体位置偏差合格;当形心位置偏差大于位置偏差阈值时,则结构实体的位置偏差不合格,于bim模型中高亮该bim构件,提示质检人员进一步核查与采取措施;
49、步骤3:尺寸偏差分析;取同一组待分析构件,获得结构实体的尺寸检测结果,以及同组bim构件的尺寸信息,计算尺寸偏差;
50、当尺寸偏差小于尺寸偏差阈值时,结构实体尺寸偏差合格;当不满足时,结构实体尺寸偏差不合格,于bim模型中高亮该bim构件,提供不合格构件的详细信息,提示质检人员进一步核查与采取措施。
51、前述本发明主方案及其各进一步选择方案可以自由组合以形成多个方案,均为本发明可采用并要求保护的方案。本领域技术人员在了解本发明方案后根据现有技术和公知常识可明了有多种组合,均为本发明所要保护的技术方案,在此不做穷举。
52、本发明的有益效果:
53、本发明系统利用自动感知单元自动获取建筑结构实体,通过3d目标检测深度学习模型与bim技术实现混凝土结构实体位置与尺寸检测的实时检测、检测数据的三维bim模型空间定位与分析、以及不合格实体的检出,特别是能够对施工人员不易测量位置的结构实体进行高效检测,克服了传统人工检测方法效率低、自动化程度低的问题,亦克服了激光检测技术在施工现场应用限制条件多、使用成本与技术门槛高的不足,对于保障大规模建筑结构的施工质量与运营安全具有重大意义。
- 还没有人留言评论。精彩留言会获得点赞!