一种空间碎片二次撞击航天器防护金属结构的声发射源定位方法
本发明属于无损检测,具体涉及一种空间碎片二次撞击航天器防护金属结构的声发射源定位方法。
背景技术:
1、自从1957年发射第一颗人造卫星以来,人类的太空探索活动日益频繁,发射到太空中的人造物体数量持续增长,而近地空间更是众多航天器(如卫星、空间站和航天飞机)绕轨运行的地方,但布满的流星体和由火箭残骸、退役卫星相撞及反卫星试验产生的空间碎片,这对在轨航天器的安全运行构成了严重威胁。声发射技术可以实时监测空间碎片撞击事件,识别并定位航天器防护结构的声发射源位置,便于我国地面控制人员及时采取应对措施。但航天器上的工作部件会产生10-1量级的弱噪声干扰,同时航天器防护结构在受到空间碎片初次撞击后发生穿孔损伤而会改变结构连续性。弹性波在含孔洞结构上的传播路径搜索方法无法继续使用早期的直线传播假设,而是沿着孔洞边缘曲线传播至接收传感器,此时声发射源到传感器的传播距离不能简单地运用平面直线距离公式进行计算。
2、传统的toa技术已被广泛用于定位各向同性结构中的声发射源,并且基于检测声发射信号在最快传播模式的每个传感器处的到达时间,这使得能够使用简单的三角测量技术来定位声发射源。通过改进基于时差构造的误差函数法可用于无损板类结构的声发射源定位,但基于时差构造的误差函数法对于时差数据的波动敏感,信号采集过程中的背景噪声干扰、材料本身不均质和后期到达时间确定方法所产生的误差对最终定位结果的准确性的影响大。
3、toa技术和基于时差的误差函数法依赖于从源到传感器的所有方向上恒定的波速以及它们之间不间断的传播路径假设。航空航天结构中具有孔、凸耳和局部不连续性的几何特征将会影响超声波的传播路径和速度,打破了toa技术和基于时差的误差函数法所依赖的直线传播路径假设,导致撞击源位置的计算过程中由于引入较大误差而降低精度。
4、前期广泛应用的手动拾取到达时间方法存在以下三个不足:(1)主观因素。不同的分析员可能选择不同的相位到达,或同一分析员的选择条件也可不同;(2)生理和心理因素。如分析员的疲劳和无聊;(3)分析员能够处理的数据数量有限,特别是大量声发射数据的情况。因此,目前的研究中许多学者都致力于获得准确的时差,提出了自动化的到达时间拾取方法。目前广泛应用的两种到达时间拾取方法是声发射信号与aic的联合回归模型、信号在短时窗和长时窗中的特征函数比率,包括sta/lta、分形维数(stafd/ltafd)和熵。kim等人使用单阶段和两阶段aic方法确定到达时间。zhou等人提出了一种混合算法,包括加窗lempel-ziv复杂度和aic方法,结合多尺度理论来研究到达时间拾取。akram研究了sta/lta、aic及其混合到达时间选取方法的性能。δt映射(dtm)方法解决了孔、凸耳和局部不连续性的几何特征这些误差源,可以使用人工源映射结构,而高精度定位复杂结构声发射源。该技术最初是为复杂几何形状的金属结构开发的,已被证明在各向同性材料(如金属、合金)中表现良好,但仍然存在训练数据的收集和处理耗时的问题。该问题需要具有ae背景的操作员来选择最佳数据,确保手动拾取数据的准确性。此外,为了定位ae源,用户必须依靠经验和试错来确定处理参数。而且,航天器工作部件产生的10-1量级的弱噪声干扰,将会导致由于信号和噪声之间的边界模糊而产生的特征曲线偏差,并影响到达时间拾取结果的准确性。这些方法都没有考虑可改变波传播路径和速度的结构因素,例如轻质航天航空结构的多孔设计。
5、综上所述,针对传统的声发射定位技术难以在弱噪声环境下含孔复杂结构中获得准确的声发射源定位结果,亟需开发一种新的声发射源定位方法,解决弱噪声环境下防护结构初次撞击穿孔后再次受到空间碎片撞击的声发射源定位问题,满足航天航空关键结构长时间服役的严苛要求。
技术实现思路
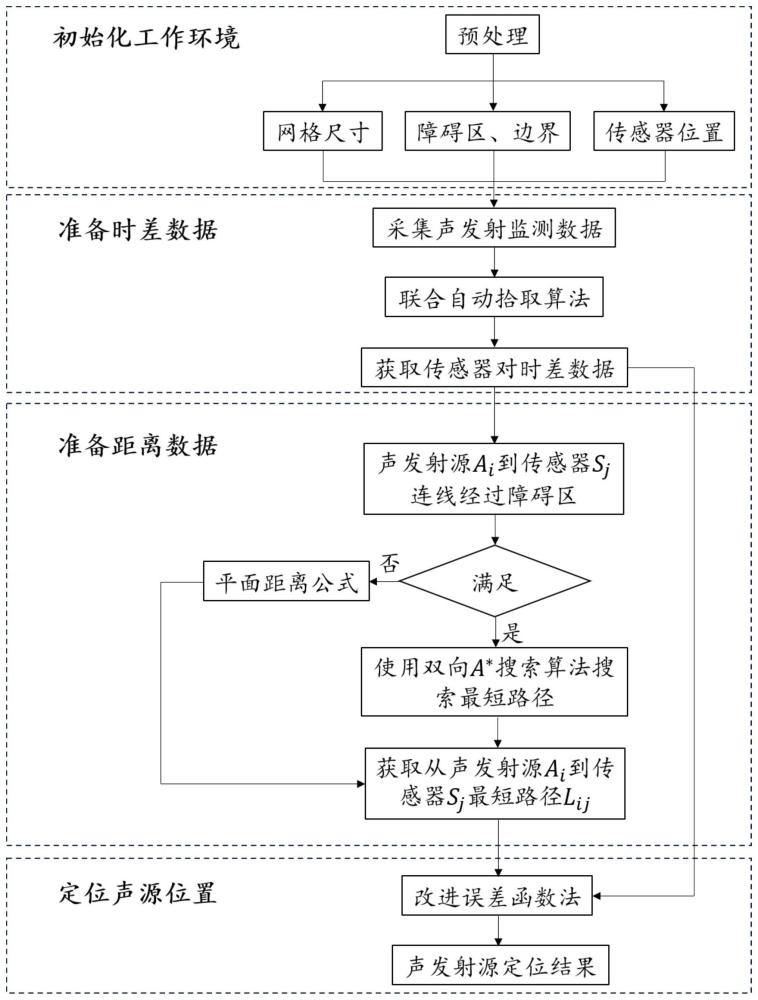
1、为了解决了弱噪声环境中准确拾取信号到达时间、定位含孔防护结构受到空间碎片二次撞击声发射源位置的关键问题,本发明提出一种空间碎片二次撞击航天器防护金属结构的声发射源定位方法,能够在确定孔洞轮廓基础上,无需弹性波在结构中传播速度的先验知识,利用联合自动拾取算法获取的时差信息和双向a*算法求解弹性波传播路径长度,结合改进误差法定位声发射源位置。
2、为实现上述目的,本发明所提供的技术解决方案包括以下步骤:
3、步骤1:在接收传感器相互连接所围成的定位区域中确定不规则空区的几何形状和具体位置,确定接收传感器在防护结构上的布局后,确定网格尺寸并划分网格;
4、步骤2:采集并存储各个接收传感器接收到的声发射信号;
5、步骤3:通过联合自动拾取算法确定第i个接收传感器与第j个接收传感器之间的时差tij(i,j=1,2,…,n且i≠j);
6、步骤4:通过双向a*算法确定声发射信号从划分好的网格节点传播到第i个接收传感器的距离di;
7、步骤5:通过改进误差函数法确定撞击源位置。
8、进一步的,所述步骤1中,定义有n个接收传感器s1,s2,…,sn,其中n限定范围为n≥3,n个接收传感器的坐标分别为(x1,y1),(x2,y2),…,(xn,yn),声发射源坐标为(x0,y0),则n个接收传感器到声发射源的距离分别为d1,d2,...,dn。
9、进一步的,所述步骤3包括以下子步骤:
10、步骤3.1:将原始声发射信号划分为包含到达时间的有效数据和不包含到达时间的无效数据,计算门槛值:
11、
12、式中,th为门槛值,max(amp)为声发射信号幅值的最值;
13、步骤3.2:舍去步骤3.1得到的门槛值后段无效数据后,计算固定时窗宽度内的六阶统计量:
14、
15、式中,s6为六阶统计量,xi为声发射数据,为声发射数据均值,σ为声发射数据标准差,n为数据点个数;该计算结果最大值所对应的横坐标即作为初次拾取到达时间;
16、步骤3.3:以初次拾取到达时间结果为中心,选取两倍时窗宽度的原始声发射信号作为计算区间;
17、步骤3.4:在两倍时窗宽度的计算区间内计算aic值,选择aic计算结果最小值所对应的横坐标作为最终的到达时间;
18、aic(k)=k×lg(var(x[1,k]))+(n-k-1)lg(var(x[k+1,n]))
19、其中,k为前后两个时窗的分界点,var(x[1,k])、var(x[k+1,n])分别为前一个窗口内数据段的方差和后一个窗口内数据段的方差;
20、步骤3.5:获取相应传感器对的时差,将第i个接收传感器的到达时间与第j个接收传感器的到达时间作差,得到时差tij(i,j=1,2,…,n且i≠j)。
21、进一步的,所述步骤4包括以下子步骤:
22、步骤4.1、计算当前网格节点(xk,yk)(k=1,2,…,l/δl)与接收传感器(xl,yl)(l=1,2,…,n)连线的直线方程,该线段所在直线的表达式为:
23、(xl-xk)y-(yl-yk)x+xkyl-ykxl=0
24、其中l是检测区域边长,δl是单个网格的边长;
25、步骤4.2、将直线方程与孔洞轮廓线方程联立求解:
26、
27、其中,am是孔洞轮廓线组成线段的斜率,bm是孔洞轮廓线组成线段在y轴上的截距,m为组成孔洞轮廓线的线段。
28、若无解说明当前网格节点与接收传感器之间的传播路径不经过孔洞区域,波沿直线传播,则直接使用平面距离公式计算距离:
29、
30、若有解则说明当前网格节点与接收传感器之间的传播路径上存在孔洞,波沿曲线传播,则进入下一步骤计算距离;
31、步骤4.3、确定双向改进a*算法搜索邻域:其中哪一层的最大搜索范围小于孔洞的最大跨度,则选择哪一层作为搜索邻域;
32、步骤4.4、确定双向a*算法启发函数:
33、
34、其中,hdiagonal(n)为沿对角线移动步数、hmanhattan(n)为曼哈顿距离、h(n)为切比雪夫距离;
35、步骤4.5、初始化参数:将起点定义为父节点,移入已考察节点列表;父节点周围搜索邻域范围内的节点定义为子节点,放入待考察节点列表,成为待考察对象;若某个节点既未在已考察节点列表,也未在待考察节点列表中,则表明还未搜索到该节点;
36、步骤4.6、开始搜索最短路径:分别计算父节点周围搜索邻域范围内的子节点的移动代价,挑选出最小代价节点从待考察节点列表中移除,放入到已考察节点列表中,并最小代价节点作为新的父节点;
37、步骤4.7、重复步骤4.6,分别对周围的相邻节点计算代价值:检查所有与新的父节点相邻的子节点,分以下几种情况判断:
38、(1)若与新的父节点相邻的子节点不在待考察节点列表中,则把其加入到待考察节点列表中,并以当前节点为父节点计算代价值;
39、(2)若搜索邻域范围内与当前父节点相邻的某个节点(某个相邻的节点)已在待考察节点列表中,则检查经由当前父节点到达那个节点是否比上一个父节点到达那个节点具有更小的实际代价;如果没有,不做任何处理;如果更好,则将当前节点设置为其父节点,并更新代价值;
40、以此类推,一旦搜索到目标节点,则完成路径搜索结束算法,得到起始节点与目标节点的路径长度:
41、
42、进一步的,所述步骤4.7中,实际代价是在状态空间中从初始状态到状态n的代价,计算方式是平面距离公式,即初始状态与状态n的直线距离。
43、进一步的,所述步骤4.7中,不做任何处理指代为当前节点不改变实际代价值,换检搜索邻域内其他节点。
44、进一步的,所述步骤5中,改进误差目标函数为:
45、e(x0,y0)=|c(θ3)t13[c(θ2)d1-c(θ1)d2]-c(θ2)t12[c(θ3)d1-c(θ1)d3]+|c(θn)t1n[c(θ2)d1-c(θ1)d2]-c(θ2)t12[c(θn)d1-c(θ1)dn]|+|c(θ3)t23[c(θ4)d2-c(θ2)d4]-c(θ4)t24[c(θ3)d2-c(θ2)d3]|+…+|c(θn)tn-1,n[c(θn-1)dn-2-c(θn-2)dn-1]-c(θn-2)tn-2,n-1[c(θn)dn-1-c(θn-1)dn]|+|c(θn-1)tn-1,n[c(θn)dn-2-c(θn-2)dn]-c(θn-2)tn-2,n[c(θn)dn-1-c(θn-1)dn]|
46、当误差函数e(x0,y0)取得最小值时,则该点即为声发射源;
47、式中参数含义分别解释如下:
48、(1)θi为弹性波从声发射源(x0,y0)到任意传感器(xi,yi)的传播路径的角度,公式为:
49、(2)vti为产生的弹性波从撞击点传到接收传感器位置的传播时间,公式为:ti=tid-tc,其中tid为第i个传感器检测到的声信号时间,tc为撞击时间;
50、(3)c(θi)为声发射源与第i个传感器之间直线方向上的速度,且
51、进一步得到tij=ti-tj(i,j=1,2,…,n且i≠j)。
52、有益效果
53、本发明的优点是:
54、(1)该方法不仅适用于高信噪比环境下的声发射源定位,在弱噪声环境下也能实现撞击位置的精准定位;
55、(2)该方法进行声发射源定位仅需4个接收传感器,大大减少结构连续监测的成本;
56、(3)该方法利用联合自动拾取算法拾取声发射信号的到达时间,相较于已报道的门槛值法、高阶统计量法等,拾取结果更准确;
57、(4)该方法突破了弹性波从撞击位置到传感器沿直线传播的前提假设,解决了航天器结构受到空间碎片初次撞击出现孔洞后二次撞击声发射源定位问题;
58、(5)该方法进行损伤定位时不需要提前测量获取波速信息。
59、(6)该方法通过引入基于时差比值的误差函数可以综合利用所有接收传感器的时间和空间信息进行解析定位,提高了定位精度和定位效率。
- 还没有人留言评论。精彩留言会获得点赞!