一种用于海上岛礁的远程定位装置及实时监测系统的制作方法
本发明涉及海上定位,具体为一种用于海上岛礁的远程定位装置及实时监测系统。
背景技术:
1、航海是人类在海上航行,跨越海洋,由一方陆地去另一方陆地的活动,在航海中,最重要的便是导航;目前,对海上船只等移动目标进行导航定位的方法主要有三种:卫星导航、惯性导航、雷达导航。而在实际的航行过程中,上述的三种导航定位方式仍存在缺陷;卫星导航对于定位的卫星数量有需求,卫星覆盖不够则无法进行定位;雷达导航依赖于地面的雷达站,需要在近地海域内才能够使用;惯性导航则存在误差积累的问题,准确性较低。在公开号为:cn112987066b的专利中,公开了一种基于多系统多源定位数据融合的海上目标定位方法,该方案的实现是基于能够获取全球导航卫星系统(gnss)、惯性导航系统(ins)等数据的,和前述的三种常见定位导航方法相同,实现起来具有一定难度。
2、同时在海上往往密布着岛礁,部分岛礁由于处于海中,不适宜日常生活,故而人为活动痕迹少,较为荒凉,开发程度低;故此,本发明提出一种用于海上岛礁的远程定位装置及实时监测系统,利用海上荒凉的岛礁作为定位的锚点,来辅助进行定位,提高海上航行的安全性。
技术实现思路
1、本发明的目的在于提供一种用于海上岛礁的远程定位装置及实时监测系统,以解决上述背景技术中提出的问题。
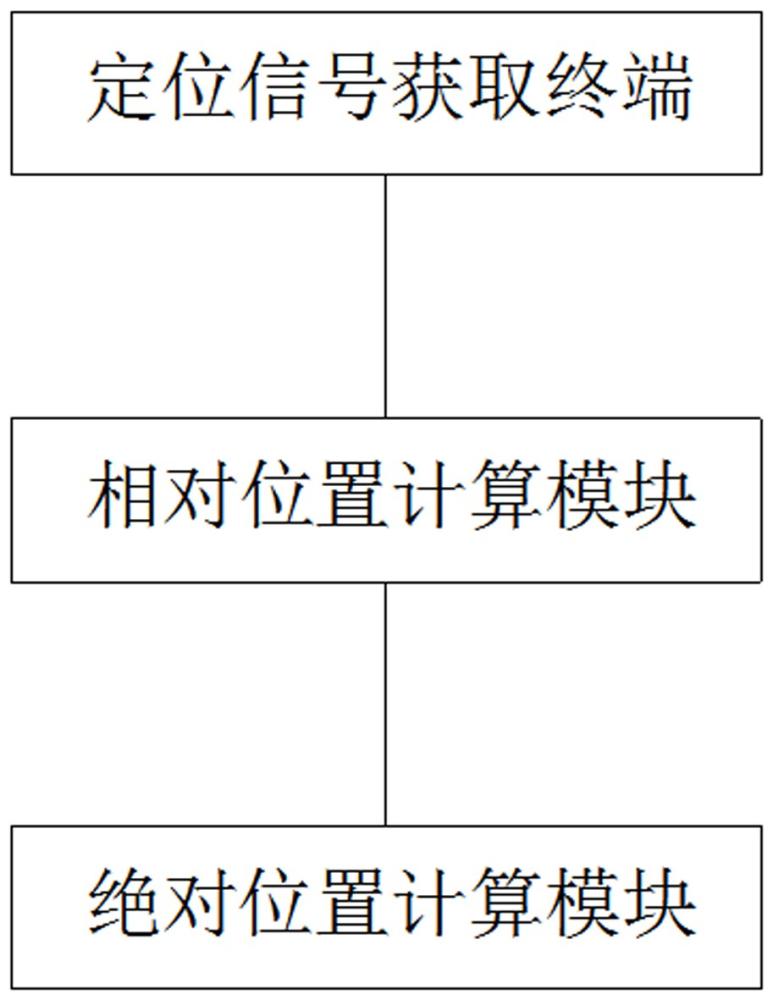
2、为实现上述目的,本发明提供如下技术方案:一种用于海上岛礁的远程定位装置,包括:
3、若干组定位信号获取终端,用于获取海上船舶所发送的定位信号,并确定信号的来波方向,所述定位信号为无线电信号;
4、相对位置计算模块,用于接收定位信号获取终端的定位信号以及来波方向,并根据来波方向计算发送信号的船舶相对于岛礁的第一位置信息;
5、绝对位置计算模块,基于计算后的第一位置信息进行二次数据分析,获取船舶的第二位置信息。
6、优选的,所述定位信号获取终端设置数量不少于六组,且均匀设置在岛礁周围的海域内,不同定位信号获取终端与岛礁之间的距离误差不超过3海里。
7、优选的,所述定位信号的来波方向指的是无线电波到达接收器的方向与正北方向之间的夹角αi,t;
8、其中所述定位信号获取终端的设置数量为i,i=1,2,3,4,……;αi,t为第i个定位信号获取终端在t时刻所对应定位信号的来波方向。
9、优选的,所述定位信号的来波方向αi,t的计算过程如下:
10、定位信号获取终端中测向天线阵设置三组天线单元,并分别记为c1、c2、c3,三组天线单元之间的距离,经过测量分别记为d12、d23、d13,其中d12代表天线单元c1、c2之间的距离,d23代表天线单元c2、c3之间的距离,d13代表天线单元c1、c3之间的距离;
11、在测向天线阵中检测到无线电信号后,通过干涉仪测量三组天线单元的相位差,分别记为β12、β23、β13,其中β12代表天线单元c1、c2之间的相位差,β23代表天线单元c2、c3之间的相位差,β13代表天线单元c1、c3之间的相位差;
12、无线电波到达接收器的方向与天线视轴直角的夹角记为无线信号的到达方向,使用θ指代;
13、任意两组天线单元之间的相位差β与无线信号的到达方向θ之间关系如下:
14、其中d为任意两组天线单元之间的距离,v为无线电传播速度,本式中取光速为常数;
15、由上式可得无线信号的到达方向θ:
16、
17、通过代入不同的天线单元距离、相位差,获得三组到达方向θ,分别记为θ12、θ23、θ13;其中θ12代表通过天线单元c1、c2获取的无线信号的到达方向,θ23代表通过天线单元c2、c3获取的无线信号的到达方向,θ13代表通过天线单元c1、c3获取的无线信号的到达方向;
18、对三组到达方向θ取平均值,获得则与定位信号的来波方向αi,t的关系为:
19、式中b为校准系数,与天线的类型以及所处地理经纬度有关,通过工作人员进行设置。
20、优选的,所述相对位置计算模块对于岛礁以及若干组定位信号获取终端进行相对位置的初始化,具体过程如下:
21、选取岛礁上的一点作为原点,建立相对位置坐标系,若干组定位信号获取终端的坐标点分别标记为(li,γi),其中li标识第i个定位信号获取终端距离原点的距离,γi表示第i个定位信号获取终端与原点之间的连线与正北方向之间的角度。
22、优选的,当不少于三组定位信号获取终端检测到定位信号后,相对位置计算模块进行船舶的第一位置信息计算,其获取过程如下:
23、确定存在三组定位信号获取终端检测到稳定的定位信号,三组定位信号获取终端分别记为x,y,z,其中x,y,z均属于小于i的正整数;
24、选取同一时刻t0三组定位信号获取终端所检测到定位信号的来波方向,分别记为其中代表标识为第x个岛礁在t0时刻所对应定位信号的来波方向,代表标识为第y个岛礁在t0时刻所对应定位信号的来波方向,代表标识为第z个岛礁在t0时刻所对应定位信号的来波方向;
25、将发出定位信号的船舶位置记为p,则该船舶相较于岛礁的第一位置信息则标记为(lp,γp),其中lp表示船舶距离岛礁原点的距离,γp表示船舶与岛礁原点之间的连线与正北方向之间的角度。
26、优选的,以x,y,p三点之间连线,构建三角形,根据三角函数方式,求出(lp,xy,γp,xy);
27、以x,z,p三点之间连线,构建三角形,根据三角函数方式,求出(lp,xz,γp,xz);
28、以y,z,p三点之间连线,构建三角形,根据三角函数方式,求出(lp,yz,γp,yz);
29、其中(lp,xy,γp,xy)代表在x,y参考系下船舶的第一位置信息坐标,(lp,xz,γp,xz)代表在x,z参考系下船舶的第一位置信息坐标,(lp,yz,γp,yz)代表在y,z参考系下船舶的第一位置信息坐标;
30、根据三个参考系下的第一位置信息坐标,确定最终的第一位置信息的坐标,具体过程为:
31、lp=λ1lp,xy+λ2lp,xz+λ3lp,yz;
32、
33、λ1、λ2、λ3为距离计算过程中引入的校正参数,其中0≤λ1≤1、0≤λ2≤1、0≤λ3≤1,且具体数值由工作人员进行设定;为距离计算过程中引入的校正参数,其中且具体数值由工作人员进行设定。
34、优选的,所述绝对位置计算模块对于第二位置信息的坐标的计算过程如下:
35、确定岛礁上作为原点处的经纬度,分别记为(m0,n0),其中m0表示原点的经度,n0表示原点的纬度;
36、确定的船舶相对于岛礁的第一位置信息(lp,γp);
37、获取船舶的经纬度(mp,np),即为第二位置信息坐标:
38、mp代表船舶的经度,其计算公式为:
39、np代表船舶的纬度,其计算公式为:np=n0+lp*ω;
40、上述式中的ω分别为调节参数,其具体的数值与岛礁所处的经纬度以及γp的值相关,由工作人员进行设定。
41、优选的,本发明还提供了一种用于海上岛礁的实时监测系统,其基于上述的一种用于海上岛礁的远程定位装置实现,还包括:
42、信息传输单元,将远程定位装置获取的第一位置信息、第二位置信息传输至控制终端以及反馈至检测到的船舶中;
43、数据请求单元,向远程定位装置发送数据请求以获取定位信息;
44、位置更新单元,对船舶的第一位置信息、第二位置信息根据时间顺序进行更新;
45、航线模拟单元,根据位置更新单元所获取的最新第一位置信息、第二位置信息在岛礁所在区域的模拟地图中形成位置点,对位置点连线后形成航线模拟图像。
46、优选的,所述航线模拟单元的更新逻辑为:
47、确定最先满足位置计算需求的时间点t0,并获取t0时刻所对应的船舶的第一位置信息、第二位置信息,并分别记为;以该点为船舶在监测范围内的初始点;
48、每隔c时刻向远程定位装置发送数据请求,获取新的船舶的第一位置信息、第二位置信息,并分别记为其中k代表申请获取船舶位置的次数,k=1,2,3,4,……;
49、按照时间顺序,依次在模拟地图中标示出t0+c、t0+2c、t0+3c……的位置点,依次对标示出的位置点进行连线,形成航线模拟图像。
50、优选的,本发明还提供了一种存储在计算机可读介质上的计算机程序产品,包括计算机可读程序,供于电子装置上执行时,提供用户输入接口以实施上述的一种用于海上岛礁的实时监测系统。
51、与现有技术相比,本发明的有益效果是:
52、1、本发明主要以海上的岛礁作为定位的锚点,利用岛礁在海中的位置是固定的,通过岛礁上设置检测设备来获取周围海域内船舶的位置,通过船舶与岛礁的相对位置来转化获取船舶的经纬度;
53、2、本发明通过设置若干组定位信号获取终端,两两构成一个参考系,从而获取船舶相对于多个参考系下的位置,提高定位的精准程度;
54、3、基于定位装置所实现的实时监测系统能够记录船舶的航线信息,反馈至终端管理;同时将定位信息反馈给船舶,便于船舶在部分无法定位的条件下获取位置,提高航行的安全性。
- 还没有人留言评论。精彩留言会获得点赞!