一种应用于中长基线的三频RTK模糊度固定方法及系统与流程
本发明涉及定位导航,尤其涉及一种应用于中长基线的三频rtk模糊度固定方法及系统。
背景技术:
1、目前,实时动态(reak-timekinematics,rtk)是全球卫星导航系统(globalnavigationsatellitesystem,gnss)实现快速厘米级定位的最常用的技术,其通过站间和星间的双差(double-difference,dd)消除卫星端的轨道/钟误差、接收机端的钟误差以及gnss信号传播路径的大气延迟误差,进而获得具有整数特性的浮点模糊度参数,并最终基于最小二乘模糊度降相关平差(least-squaresambiguitydecorrelationadjustment,lambda)方法实现模糊度的整数固定。
2、然而在中长基线时,dd难以完全消除gnss信号传播路径的电离层和对流层等大气延迟,应当作为待估参数进行估计,从而使得传统双频rtk的观测模型强度变弱,并且待估的大气延迟参数与模糊度参数存在相关,影响模糊度参数的快速收敛。另外,在gps现代化、北斗和galileo系统全球组网提供服务后,具备三频观测成为gnss系统的显著特点之一。基于三频观测,多种无几何距离(geometry-free,gf)的“超宽巷(extra-wide-lane,ewl)-宽巷(wide-lane,wl)-窄巷(narrow-lane,nl)”模糊度取整固定方法被提出,增强了模型强度,实现了中长基线rtk模糊度固定。但在中长基线时,基于gf模型进行wl模糊度固定的成功率仍较低,影响rtk的快速收敛。
3、因此,提出一种应用于中长基线的三频rtk模糊度固定方法及系统,来解决现有技术中长基线的三频模糊度固定可靠性低、定位有延时的问题,是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了一种应用于中长基线的三频rtk模糊度固定方法及系统,可以达到实现快速厘米级定位的效果。
2、为了实现上述目的,本发明采用如下技术方案:
3、一种应用于中长基线的三频rtk模糊度固定方法,包括以下步骤:
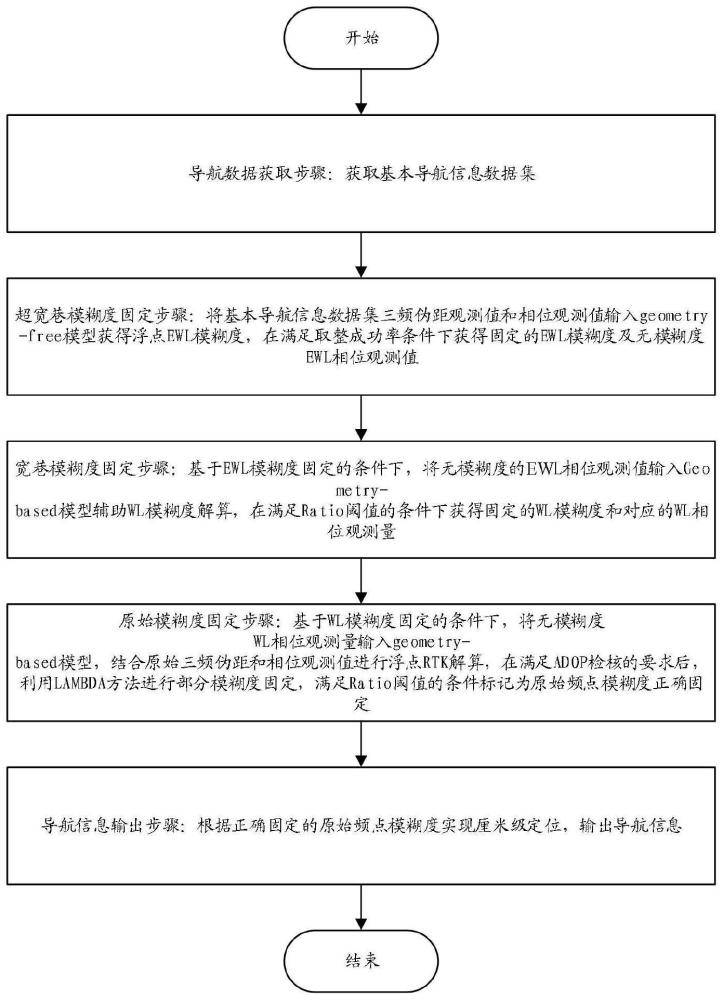
4、导航数据获取步骤:获取基本导航信息数据集;
5、超宽巷模糊度固定步骤:将基本导航数据集中的三频伪距观测值和相位观测值输入geometry-free模型获得浮点ewl模糊度,在满足取整成功率条件下获得固定的ewl模糊度及无模糊度的ewl相位观测值;
6、宽巷模糊度固定步骤:基于ewl模糊度固定的条件下,将无模糊度的ewl相位观测值输入geometry-based模型辅助wl模糊度解算,在满足ratio阈值的条件下获得固定的wl模糊度和对应的wl相位观测量;
7、原始模糊度固定步骤:基于wl模糊度固定的条件下,将无模糊度的wl相位观测量输入geometry-based模型,结合原始三频伪距和相位观测值进行浮点rtk解算,在满足adop检核的要求后,利用lambda方法进行部分模糊度固定,满足ratio阈值的条件标记为原始频点模糊度正确固定;
8、导航信息输出步骤:根据正确固定的原始频点模糊度,输出导航信息。
9、上述的方法,可选的,数据获取步骤中,基本导航信息数据集包括但不限于流动站的伪距、载波相位、广播星历和基站的伪距、载波相位和站坐标。
10、上述的方法,可选的,宽巷模糊度固定步骤中,ewl相位观测值作为无模糊度的高精度伪距观测输入geometry-based模型,辅助wl相位观测值进行wl模糊度解算。
11、上述的方法,可选的,宽巷模糊度固定步骤中,wl模糊度固定基于lambda方法。
12、上述的方法,可选的,原始模糊度固定步骤中,基于方差协方差阵计算adop,adop小于0.14周时进行lambda搜索。
13、一种应用于中长基线的三频rtk模糊度固定系统,执行上述任一项所述的一种应用于中长基线的三频rtk模糊度固定方法,包括依次连接的导航数据获取模块、观测值获取模块、超宽巷模糊度固定模块、宽巷模糊度固定模块、原始模糊度固定模块和导航信息输出模块;
14、导航数据获取模块:获取基本导航信息数据集;
15、超宽巷模糊度固定模块:将基本导航数据集中的三频伪距观测值和相位观测值输入geometry-free模型获得浮点ewl模糊度,在满足取整成功率条件下获得固定的ewl模糊度及无模糊度的ewl相位观测值;
16、宽巷模糊度固定模块:基于ewl模糊度固定的条件下,将无模糊度的ewl相位观测值输入geometry-based模型辅助wl模糊度解算,在满足ratio阈值的条件下获得固定的wl模糊度和对应的wl相位观测量;
17、原始模糊度固定模块:基于wl模糊度固定的条件下,将无模糊度的wl相位观测量输入geometry-based模型,结合原始三频伪距和相位观测值进行浮点rtk解算,在满足adop检核的要求后,利用lambda方法进行部分模糊度固定,满足ratio阈值的条件标记为原始频点模糊度正确固定;
18、导航信息输出模块:根据正确固定的原始频点模糊度实现厘米级定位,输出导航信息。
19、经由上述的技术方案可知,与现有技术相比,本发明提供了一种应用于中长基线的三频rtk模糊度固定方法及系统,其在超宽巷模糊度可靠固定基础上,采用geometry-based模型求解wl模糊度,最后采用顾及大气延迟参数的geometry-based模型进行三个频率原始模糊度的固定,有望提高中长基线rtk的模糊度固定率,实现快速厘米级定位。
技术特征:
1.一种应用于中长基线的三频rtk模糊度固定方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种应用于中长基线的三频rtk模糊度固定方法,其特征在于,
3.根据权利要求1所述的一种应用于中长基线的三频rtk模糊度固定方法,其特征在于,
4.根据权利要求1所述的一种应用于中长基线的三频rtk模糊度固定方法,其特征在于,
5.根据权利要求1所述的一种应用于中长基线的三频rtk模糊度固定方法,其特征在于,
6.一种应用于中长基线的三频rtk模糊度固定系统,其特征在于,执行权利要求1-5任一项所述的一种应用于中长基线的三频rtk模糊度固定方法,包括依次连接的导航数据获取模块、超宽巷模糊度固定模块、宽巷模糊度固定模块、原始模糊度固定模块和导航信息输出模块;
技术总结
本发明公开了一种应用于中长基线的三频RTK模糊度固定方法及系统,涉及定位导航技术领域。包括:获取基本导航信息数据集,据此给出非组合的三频伪距和相位观测值,基于Geometry‑free模型的超宽巷模糊度固定方法获得固定的EWL模糊度及EWL相位观测值,基于Geometry‑based模型的宽巷模糊度固定方法获得固定的WL模糊度和对应的WL相位观测量,基于Geometry‑based模型的原始模糊度固定方法进行原始模糊度正确固定,输出导航信息。本发明有助于提高中长基线RTK的模糊度固定率,实现快速厘米级定位的功能。
技术研发人员:尹潇,党西锋,高成发,武金城,吴胜涛,王鑫,刘永强,王斌
受保护的技术使用者:中铁一局集团城市轨道交通工程有限公司
技术研发日:
技术公布日:2024/5/9
- 还没有人留言评论。精彩留言会获得点赞!