便携式毫米波探测系统和方法
本发明涉及探测器领域,具体是一种便携式毫米波探测系统和方法。
背景技术:
1、现有探测器主要有光学探测器和红外传像探测等传统探测器,具有低分辨率,易受环境影响等不足。
2、(1)光学探测器技术发展现状:
3、光学传感器:光学传感器用于检测可见光和近红外光谱范围的信号。它们在图像捕捉、机器视觉、数字摄影等领域得到广泛应用。当前光学传感器的分辨率和灵敏度不断提高,使得摄像设备能够捕捉更加清晰和细节丰富的图像。
4、激光器定位:激光器是一种产生高强度、相干和单色的光束的设备。激光器在通信、医疗、材料加工、科学研究等众多领域有着广泛应用。近年来,激光器技术取得了显著进展,包括高功率激光器、超快激光器和半导体激光器的改进。
5、(2)红外热传像探测器技术发展现状:
6、热释电探测器:热释电探测器仍然是广泛应用于红外热像仪中的一种技术。现代热释电探测器的灵敏度和响应速度有所提高,使得红外热像仪能够提供更清晰、更准确的热成像结果。
7、霍尔效应探测器:霍尔效应探测器是另一种常见的红外热传感器类型。它们利用半导体材料中的霍尔效应来测量光子在材料中产生的电场变化。这些探测器通常具有快速响应和高灵敏度等特点。
8、新材料与技术:随着新材料和新技术的发展,如量子级联探测器(quantumcascade detectors,qcds)和热电(thermoelectric)探测器等,红外热传像探测器的性能不断改善,能够实现更高的分辨率和更广泛的波长范围。
9、以上探测器存在以下缺陷:
10、(1)光学探测器低分辨率,无穿透性:
11、光学传感器的分辨率受限:光学传感器的分辨率取决于其像素密度。较低的像素密度可能导致图像细节的损失和清晰度的下降。光学系统设计无法穿过障碍物探测后方的物体。
12、(2)红外热传像探测器易受环境影响:
13、温度差异:红外热传像探测器的工作原理基于物体发射的红外辐射,因此它们对环境温度差异非常敏感。当环境温度变化较大时,可能会影响探测器的灵敏度和稳定性。
14、大气影响:红外热传像探测器的性能也会受到大气中的吸收、散射和辐射的影响。特定的大气条件可能导致红外辐射的衰减或干扰,从而影响探测器的准确性和灵敏度。
15、随着集成电路等技术的发展,毫米波雷达设备越来越小型化,可以集成在一些便携的嵌入式设备中,在现有的技术当中,由于嵌入式设备的算力是有限的,同时缺少专用的电路结构设计,往往需要将前端雷达采集得到的数据传输到电脑或其他计算设备中做进一步分析处理。存在的问题在于设备数量较多,集成为一体设备的难度较大。
技术实现思路
1、发明旨在设计制作出一种高性能、便携式、低成本的探测系统及探测方法,实现在复杂多变环境下的物品及人物的探测与定位需求,打破毫米波探测器的高成本、高功率、大体积的不足。在自然灾害救援,军事应用等领域发挥重要作用。
2、为了实现上述目的,本发明采用的技术方案是:便携式毫米波探测系统,包括fmcw毫米波雷达模块、fpga模块、电池及lcd显示器,其中所述fmcw毫米波雷达模块向外发射chirp脉冲并接收回波数据,所述fpga模块采集fmcw毫米波雷达模块的回波数据,进行预处理、位置信息提取和视频图像产生处理,然后将视频信号传入lcd显示器进行显示,所述电池分别给fmcw毫米波雷达模块、fpga模块及lcd显示器供电。
3、进一步,所述fmcw毫米波雷达模块采用mimo毫米波雷达系统,天线采用贴片串馈。
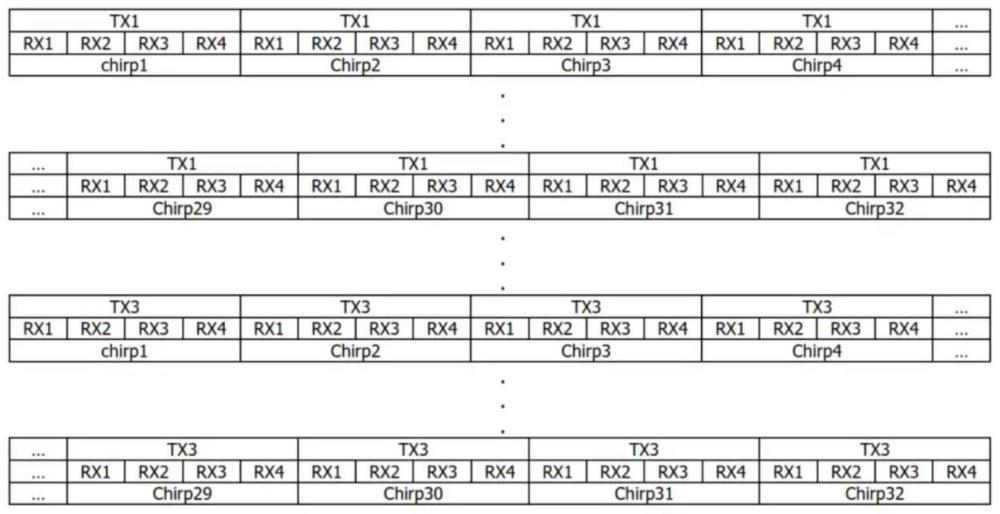
4、进一步,所述fmcw毫米波雷达模块采用2发4收数据结构,先发送tx1天线的所有数据,再发送tx3天线的所有数据,tx1和tx3交替128次,每一个chirp包括2*4=8个接收天线的数据,每一个接收天线的数据为128点,每一个点为虚部和实部,128点数据排列为:虚部1,实部1,虚部2,实部2,...,虚部128,实部128,每一个实部或者虚部由2个字节组成。
5、进一步,所述fpga模块包括数据采集核、探测成像算法加速核、显示驱动模块,所述数据采集核用spi协议采集fmcw毫米波雷达模块的回波数据,探测成像算法加速核进行预处理、位置信息提取和视频图像产生处理,然后由显示驱动模块驱动lcd显示器进行显示。
6、进一步,所述探测成像算法加速核包括ti_spi_slave_excute模块、data_parsing模块、r_p_extract模块、bk_2_axis模块、xfft模块、fft_shif模块、mmw_r_a_map_disp模块、vga_driver模块、vgadrv_conv_rgb2dvi模块,所述ti_spi_slave_excute模块匹配spi接口数据并接收雷达回波数据,由data_parsing模块进行数据解析,r_p_extract模块将解析后的数据矩阵化,传入下一级xfft模块进行傅里叶变换运算;
7、所述bk_2_axis模块将数据总线统一为arm嵌入式系统的通用的axi协议总线进行数据传输;
8、所述fft_shif模块进行频谱位移将频谱图的中心移动到频谱的中心点,再通过恒定虚警率检测算法,过滤掉无关的频谱,定位回波信号的位置,然后解析出index信息和输出信号数据;
9、所述mmw_r_a_map_disp模块根据index信息和输出信号数据,计算出回波数据的成像距离范围,通过上级的vga_driver模块,输出信号的坐标点,并产生图像;
10、所述vgadrv_conv_rgb2dvi模块接收vga_driver模块产生的视频时序信号和mmw_r_a_map_disp模块的输出信号,进行像素转换;最后经过fft_shif模块进行频谱位移。
11、进一步,计算回波数据的成像距离范围的公式为
12、
13、d0表示雷达与目标间的距离,表示接受到电磁波信号的相位角度,λ为雷达的工作波长。
14、本发明还提供了一种便携式毫米波探测方法,包括以下步骤:
15、s1、系统上电后,开始执行fpga程序,同时fmcw毫米波雷达模块进入复位状态;
16、s2、fpga模块读取sd卡中的可执行bin文件,固化对应的采集和成像数字电路;
17、s3、初始化fpga模块,fpga模块向fmcw毫米波雷达模块发送采集指令,同时不断写入fpga模块中的内存当中;
18、s4、读取fpga模块内存当中的帧数据,采用探测成像算法对数据进行处理,生成视频图像数据;
19、s5、视频图像数据输出到对应的hdmi信号管脚,对lcd显示器进行驱动,显示实时的探测定位图像。
20、进一步,所述探测成像算法包括以下步骤:
21、帧数据传入xfft模块,进行第一次快速傅里叶运算,然后数据通过m_axi_data传入下一级的fft_shif模块;
22、fft_shif模块将频谱图的中心移动到频谱的中心点,再通过恒定虚警率检测算法,过滤掉无关的频谱,定位回波信号的位置,然后解析出index信息和输出信号数据;
23、输出信号数据传入下一级mmw_r_a_map_disp模块,计算出回波数据的成像的距离范围,通过上级的vga_driver模块产生视频信号时序,输出信号的坐标点,并产生图像,通过rgb视频图像流的方式传入下一级,进行hdmi显示图像的构造。
24、进一步,所述mmw_r_a_map_disp模块中添加了corlormap函数以增强显示效果。
25、本发明技术方案带来的有益效果:
26、1、穿透力强:毫米波具有较高的穿透能力,能够穿透一些常见材料如纸张、织物和塑料等,甚至在一定程度上穿透云雾、烟雾和雾霾等。相比之下,红外辐射在这些物质中的穿透能力较差。
27、2、无光照需求:毫米波是一种非光学波段,不受光照条件的限制。相对于红外和热成像技术需要光源或热源的情况,毫米波探测器可以在全天候条件下工作,不受光线强度和环境照明的影响。
28、3、轻量化的一体化设计:探测器通过毫米波雷达模块和fpga模块电路集成化设计,可达到单手手持的便携程度,对比其他繁重复杂的设备更加轻便;对比前端雷达加pc设备的系统组成更是具有突出的方便移动及使用等特性。
29、4、集成性能:系统中fpga模块的数据采集核、fpga的板载ram以及探测成像算法核以及图像时序产生模块均可以实时刷新,每当采入数据写满ram模块及传入下一级图像时序产生模块,具有快速响应时间、较低的功耗和极快的反应速度。采用专用的集成电路设计,对比前端雷达加pc设备的系统,具有更少的电路结构更低的成本。
30、5、采用小型化低功耗mimo毫米波雷达系统,天线采用贴片串馈,天线增益达到12dbi,具有高探测精度,此外该技术的采用极大的节省了空间,为本发明制作便携式探测器的目标提供了保障。
31、6、fpga模块中的采集电路采用spi协议实现了高速数据采集,传输数据速率达到40mhz,误码率为0%,实现数据的实时高速传输,同时确保了数据的准确性。
32、7、fpga模块采用全可编程fpga soc边缘处理器,实现毫米波雷达的探测算法与成像算法的fpga集成与加速器器开发,fpga资源占用控制在20%以下,同时二次开发了ai边缘处理,完成毫米波雷达深度学习处理单元,ai解析目标的轮廓、类别、行为,实现特定物体的识别与跟踪,具有移动目标人工智能识别功能。
- 还没有人留言评论。精彩留言会获得点赞!