巡检无人车、视觉定位优化系统、方法、电子设备及介质
本申请涉及巡检无人车,特别涉及一种巡检无人车、视觉定位优化系统、方法、电子设备及介质。
背景技术:
1、随着技术的发展,巡检无人车得到广泛应用,管理中心人员设置好巡检无人车路径后,无人车会按照特定线路进行自动巡视,记录下各种场景状态,遇到异常情况会实时通报管理中心,随着应用的普及,巡检无人车的应用场景不再局限于室内巡检,也涉及到全天候条件下的室外巡检,极大提高了工作效率。
2、相关技术中,巡检无人车功能的实现,主要依赖于各种类型的光学传感器来实现自身定位,从而进行自动避障和自动路径规划。
3、然而,室外环境天气复杂,尤其雨雪风沙等极端恶劣天气对传感器影响很大,极大地制约着巡检无人车的视觉定位能力,亟待解决。
技术实现思路
1、本申请提供一种巡检无人车、视觉定位优化系统、方法、电子设备及介质,以解决面对雨雪风沙等极端天气时,巡检无人车的视觉定位能力受到制约的问题,优化极端天气下巡检无人车的视觉定位精度,提高巡检无人车的自动避障、自动路径规划的准确性。
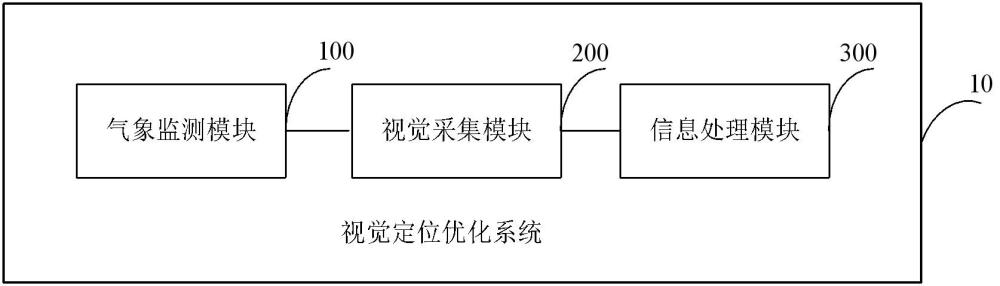
2、为达到上述目的,本申请第一方面实施例提出一种视觉定位优化系统,包括:
3、气象监测模块,所述气象监测模块用于获取巡检无人车当前所处环境的气象数据;
4、视觉采集模块,所述视觉采集模块用于采集所述巡检无人车当前所处环境的图像数据;
5、信息处理模块,所述信息处理模块用于根据所述气象数据建立气象模型,并对所述图像数据进行处理,提取所述图像数据的特征点,对比所述特征点在多帧图像上的位置,解算特征点的运动特征。
6、根据本申请的一个实施例,所述信息处理模块,包括:
7、信息处理单元,所述信息处理单元用于判断所述特征点的运动特征是否符合所述气象模型;
8、若所述特征点的运动特征符合所述气象模型,则基于所述特征点的运动特征优化所述气象模型,否则,根据所述特征点的运动特征进行视觉定位解算。
9、根据本申请的一个实施例,所述气象监测模块,包括:
10、气象视觉对比单元,所述气象视觉对比单元用于提供满足预设干扰条件的视频信息,并从中提取雨雪、树叶的运动轨迹,为所述气象模型提供参考。
11、根据本申请的一个实施例,所述气象视觉对比单元,包括背景板和与所述背景板相对的摄像头,所述背景板根据所述巡检无人车当前所处环境自动调整亮度和颜色。
12、根据本申请的一个实施例,所述气象监测模块还包括风速风向传感器、温湿度传感器、能见度传感器和雨量监测传感器中的至少一种。
13、根据本申请的一个实施例,所述气象监测模块设置于可控旋转装置上,以获取不同方向的气象数据。
14、根据本申请实施例提出的视觉定位优化系统,通过气象监测模块获取巡检无人车当前所处环境的气象数据,通过视觉采集模块采集巡检无人车当前所处环境的图像数据的,通过信息处理模块根据气象数据建立气象模型,并对图像数据进行处理,提取图像数据的特征点,对比特征点在多帧图像上的位置,解算特征点的运动特征。由此,通过提供高精度的实时气象模型,解决了面对雨雪风沙等极端天气时,巡检无人车的视觉定位能力受到制约的问题,优化极端天气下巡检无人车的视觉定位精度,提高巡检无人车的自动避障、自动路径规划的准确性。
15、为达到上述目的,本申请第二方面实施例提出一种巡检无人车,其采用上述的视觉定位优化系统,同一区域的多辆所述巡检无人车相互共享所述气象模型。
16、为达到上述目的,本申请第三方面实施例提出一种视觉定位优化方法,采用上述的视觉定位优化系统,所述方法包括以下步骤:
17、利用所述气象监测模块获取所述巡检无人车当前所处环境的气象数据;
18、利用所述视觉采集模块采集所述巡检无人车当前所处环境的图像数据;
19、利用所述信息处理模块根据所述气象数据建立气象模型,并对所述图像数据进行处理,提取所述图像数据的特征点,对比所述特征点在多帧图像上的位置,解算特征点的运动特征。
20、根据本申请实施例提出的视觉定位优化方法,通过上述巡检无人车解决了面对雨雪风沙等极端天气时,巡检无人车的视觉定位能力受到制约的问题,优化极端天气下巡检无人车的视觉定位精度,提高巡检无人车的自动避障、自动路径规划的准确性。
21、为达到上述目的,本申请第四方面实施例提出一种电子设备,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的视觉定位优化方法。
22、为达到上述目的,本申请第五方面实施例提出一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行,以用于实现如上述实施例所述的视觉定位优化方法。
23、本申请附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实践了解到。
技术特征:
1.一种视觉定位优化系统,其特征在于,包括:
2.根据权利要求1所述的视觉定位优化系统,其特征在于,所述信息处理模块,包括:
3.根据权利要求1所述的视觉定位优化系统,其特征在于,所述气象监测模块,包括:
4.根据权利要求3所述的视觉定位优化系统,其特征在于,所述气象视觉对比单元,包括背景板和与所述背景板相对的摄像头,所述背景板根据所述巡检无人车当前所处环境自动调整亮度和颜色。
5.根据权利要求4所述的视觉定位优化系统,其特征在于,所述气象监测模块还包括风速风向传感器、温湿度传感器、能见度传感器和雨量监测传感器中的至少一种。
6.根据权利要求5所述的视觉定位优化系统,其特征在于,所述气象监测模块设置于可控旋转装置上,以获取不同方向的气象数据。
7.一种巡检无人车,采用如权利要求1-6任一项所述的视觉定位优化系统,其特征在于,同一区域的多辆所述巡检无人车相互共享所述气象模型。
8.一种视觉定位优化方法,采用权利要求1-6任一项所述的视觉定位优化系统,其特征在于,所述方法包括以下步骤:
9.一种电子设备,其特征在于,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如权利要求8所述的视觉定位优化方法。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行,以用于实现如权利要求8所述的视觉定位优化方法。
技术总结
本申请涉及巡检无人车技术领域,特别涉及一种巡检无人车、视觉定位优化系统、方法、电子设备及介质。视觉定位优化系统包括:用于获取巡检无人车当前所处环境的气象数据的气象监测模块,用于采集巡检无人车当前所处环境的图像数据的视觉采集模块,以及用于根据气象数据建立气象模型,并对图像数据进行处理,提取图像数据的特征点,对比特征点在多帧图像上的位置,解算特征点的运动特征的信息处理模块。由此,通过提供高精度的实时气象模型,解决了面对雨雪风沙等极端天气时,巡检无人车的视觉定位能力受到制约的问题,优化极端天气下巡检无人车的视觉定位精度,提高巡检无人车的自动避障、自动路径规划的准确性。
技术研发人员:李一鹏,戴琼海
受保护的技术使用者:清华大学
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!