一种基于拓扑的多目标模糊航迹抗差关联方法及系统
本发明属于多雷达目标航迹关联,尤其涉及一种基于拓扑的多目标模糊航迹抗差关联方法机系统。
背景技术:
1、随着通信技术、计算机技术和自动化技术等现代科学技术的快速发展,现代战争已呈现出高科技、信息化、智能化、全域化的特征。面对复杂与多元化的作战环境,单站雷达存在侦查范围窄、精度有限、易受干扰等的局限性,已无法满足现代战争信息化的需求。因此,多站雷达系统数据融合技术应运而生。多站雷达系统中,分布式结构具有鲁棒性更好、代价更小的优势,成为了多站雷达系统广泛应用的结构。而在分布式多站雷达体系中,单站雷达将其对多目标的局部航迹上传至融合中心,融合中心需要航迹关联技术去判断不同的局部航迹是否来源于同一个跟踪目标。进行正确的航迹关联是融合中心对航迹进行融合前的关键的前置问题。每个雷达的传感器的精度不同,时间间隔不用,且会具有不同的系统误差,融合中心对目标航迹的错误关联、漏关联会导致融合后系统航迹的精度反而下降与错误判断目标数量的结果。因此,在分布式结构下,对航迹关联进行研究具有重要意义。
2、singer和kanyuch基于统计判决理论,将航迹关联问题转化为假设检验问题,提出了加权航迹关联算法,完成了航迹关联的开创性工作。随后,bar-shalom考虑到了雷达间共同噪声的影响,对加权航迹关联进行了修正。何友教授针对加权法与修正法在航迹密集、交叉等环境下导致错、漏相关航迹的情况,借助了雷达信号检测中的序贯检测的思想,提出了独立序贯、相关序贯航迹关联算法。何友教授在航迹关联问题中,运用了现代数学的综合分析方法,提出了基于模糊理论的航迹关联算法,包括模糊双门限算法、模糊综合函数算法及模糊综合决策算法,这类算法主要通过航迹间的各类信息构建模糊因素集,通过模糊隶属度函数去描述航迹信息的相似程度去解决航迹关联问题。学者衣晓提出基于灰色理论的航迹关联算法,为航迹关联问题探索了一条新的途径(衣晓,关欣,何友.分布式多目标跟踪系统的灰色航迹关联模型[j].信号处理,2005,21(6):653-655.)。由于灰色理论对样本量的要求低,许多学者将灰色关联与其他技术结合去解决航迹关联问题。郭文艳将航迹信息使用经验模态分解成多个固有模态函数并构成矩阵,将矩阵的奇异值应用于灰关联度计算中(郭文艳,韩崇昭,雷明.基于emd和灰关联技术的航迹关联方法[j].控制与决策,2008,23(7):803-807.)。衣晓定义了一种区间序列的相似度度量,利用灰色关联度进行异步的航迹关联算法(衣晓,曾睿.基于k近邻平均距离的异步航迹关联算法[j].系统工程与电子技术,2022,44(11):3515-3521.)。一些学者将航迹视为集合,通过不同衡量集合间的距离度量方法去进行航迹关联,如刘伟峰副教授提出基于最优次模式分配距离的航迹关联算法(刘伟峰,文成林.基于ospa距离的航迹关联方法[j].航空学报,2012,33(6):1083-1092.),李寅龙学者提出基于hausdorff距离并加入时间滑窗的航迹关联算法(李寅龙,张天舒.基于时间滑窗的混合hausdorff距离航迹关联算法[j].舰船电子工程,2021,41(10):52-56,60.)。
3、徐毓将航迹序列视为非平稳随机过程,借助小波变换的信号分析方法对航迹数据提取信息,进行航迹关联(徐毓,金以慧.多尺度小波变换提取趋向的异步航迹关联方法[j].信号处理,2003,(02):120-123.)。秦卫华由小波分析法分析出航迹的整体走势和局部特征,在航迹间整体走势相同的时候,再根据局部特征进一步的进行判定(秦卫华,胡飞,侯雪梅.基于小波变换的航迹关联方法[j].电子与信息学报,2007,(05):1027-1030.)。
4、而以上航迹关联算法主要考虑了传感器的量测误差、目标密度等的影响,忽略了系统误差的情况。为应对系统误差下的航迹关联问题,学者的工作主要分类两类。第一类方法在关联过程中对系统误差进行估计,对航迹数据进行误差配准。danford等人将联合最大后验系统偏差估计和航迹关联问题归为非凸混合整数非线性规划问题类,并给出求解方法(danford s,kragel b d,poore a.joint map bias estimation and data association:algorithms[c]//signal and data processing of small targets 2007.spie,2007,6699:491-508.)。何友教授将航迹数据作为整体,结合傅里叶变换来估计和补偿航迹数据的相对旋转量和平移量,实现了误差配准前的航迹关联(何友,宋强,熊伟.基于傅里叶变换的航迹对准关联算法[j].航空学报,2010,31(02):356-362.)。在此基础上,何友教授利用radon变换与傅里叶变换分别估计系统误差所造成的旋转角与平移量,进行对准补偿(何友,宋强,熊伟.基于相位相关的航迹对准关联技术[j].电子学报,2010,38(12):2718-2723)。li等人提出了一种结合系统误差估计、航迹关联与融合的处理方法,该方法结合期望最大化算法与卡尔曼滤波算法,通过e步与m步交替迭代来获得估计结果(li z,chen s,leung h,et al.joint data association,registration,and fusion using em-kf[j].ieee transactions on aerospace and electronic systems,2010,46(2):496-507.)。zhu等人结合图像处理中的相干点漂移算法,将航迹关联问题转化为点集匹配问题(zhu h,wang m,yuen k v,et al.track-to-track association by coherent point drift[j].ieee signal processing letters,2017,24(5):643-647.)。李保珠等人在点集匹配问题基础上,将高斯混合模型与航迹间拓扑信息相结合,由拓扑信息决定高斯混合模型中的权重,求解航迹关联问题(李保珠,董云龙,丁昊等.基于高斯混合模型的航迹抗差关联算法[j].航空学报,2019,40(06):226-234.)。第二类方法是对系统误差具备抵抗能力的航迹关联算法。石玥等人提出基于目标参照拓扑结构的抗差航迹关联方法,但该方法缺乏严格的数学描述(yue s,yue w,xiuming s.a novel fuzzy pattern recognition dataassociation method for biased sensor data[c]//20069th internationalconference on information fusion.ieee,2006:1-5.)。吴泽民提出了基于拓扑序列的航迹抗差关联算法,其序列依据方位角递增序列排序,并探讨了拓扑序列的邻居范围、序列个数不同等的情况(吴泽民,任姝婕,刘熹.基于拓扑序列法的航迹关联算法[j].航空学报,2009,30(10):1937-1942.)。宋强将拓扑信息按象限划分,与航速欧式距离和航向变化率构成模糊因素集基于模糊数学进行判决,但象限划分的拓扑信息容易受到量测误差的影响(宋强,熊伟,马强.基于目标不变信息量的多目标模糊航迹对准关联算法[j].系统工程与电子技术,2011,33(01):190-195.)。tian等人提出了拓扑序列的严格数学定义,使用ospa距离去衡量拓扑序列间的相似度(tian w,wang y,shan x,et al.track-to-trackassociation for biased data based on the reference topology feature[j].ieeesignal processing letters,2014,21(4):449-453.),并进一步提出rep航迹关联(tianw.reference pattern-based track-to-track association with biased data[j].ieeetransactions on aerospace and electronic systems,2016,52(1):501-512.)。
5、通过上述分析,现有技术存在的问题及缺陷为:
6、(1)常规航迹关联算法主要考虑了传感器的量测误差、目标密度等的影响,忽略了在实际应用的场景中,传感器会存在系统误差的情况。系统误差使得传感器上报航迹的绝对位置不可靠,造成上述传统航迹关联算法在应用到系统误差环境中时出现严重的性能衰退。
7、(2)基于拓扑序列的航迹抗差关联算法只利用了航迹的位置信息,且对拓扑序列间的相似性描述各不同相同,使用了排序法或划分象限构造向量的方法受量测误差影响大,航迹关联性能下降。
技术实现思路
1、为了克服上述现有技术存在的问题,本发明的目的在于提供一种基于拓扑的多目标模糊航迹抗差关联方法及系统,利用各目标的拓扑序列之间的ospa距离、航速欧式距离、航向变化率的欧氏距离三个不受系统误差影响的因素构建模糊因素集,具备抗系统误差能力;使用ospa距离衡量拓扑序列间的相似性,且在模糊隶属度计算中对其进行归一化,使用柯西隶属度表征相似性,柯西隶属度函数衰减速度更慢,对于漏报、虚警情况下具有较高容忍度;结合了更多不受系统误差影响的因素,提高了航迹关联的准确性。
2、为了实现上述目的,本发明采用以下技术方案:
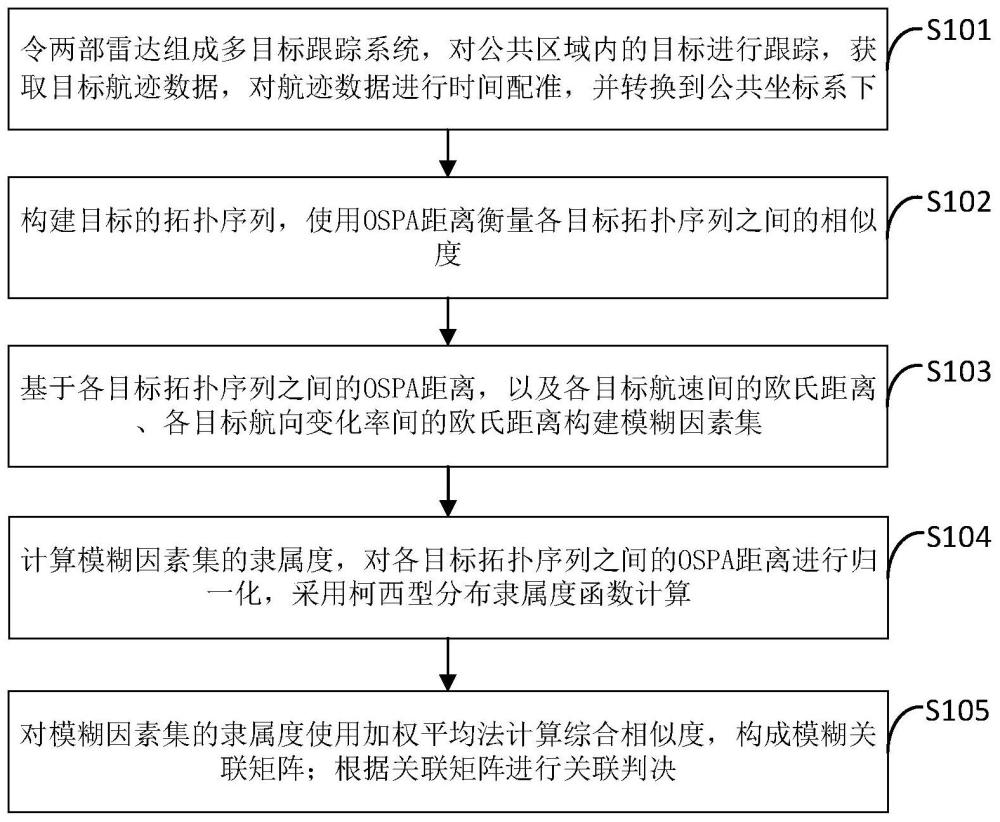
3、步骤一,令两部雷达组成多目标跟踪系统,对公共区域内的目标进行跟踪,获取目标航迹数据,对航迹数据进行时间配准,并转换到公共坐标系下;
4、步骤二,基于步骤一的目标航迹数据构建目标的拓扑序列,使用ospa距离衡量各目标拓扑序列之间的相似度;
5、步骤三,基于步骤二中各目标拓扑序列之间的ospa距离,以及各目标航速间的欧氏距离、各目标航向变化率间的欧氏距离构建模糊因素集;
6、步骤四,计算步骤三中构建的模糊因素集的隶属度,对步骤二中各目标拓扑序列之间的ospa距离进行归一化,采用柯西型分布隶属度函数计算;
7、步骤五,对步骤四中模糊因素集的隶属度使用加权平均法计算综合相似度,构成模糊关联矩阵;根据关联矩阵进行关联判决。
8、进一步,所述步骤一中,令两部雷达组成多目标跟踪系统,对公共区域内的目标进行跟踪,获取目标航迹数据,对航迹数据进行时间配准,并转换到公共坐标系下,具体过程为:假设有两部雷达组成多目标跟踪系统,对公共区域内的目标进行跟踪,雷达的采样频率相同,开机时间不同,记两部雷达的航迹集合为:
9、u1={1,2,…n1},u2={1,2,…n2}
10、使用内推外插法对数据进行时间配准,将雷达1与雷达2的航迹数据对齐于同一时刻,获得雷达1对目标i的状态估计为与估计误差协方差矩阵雷达2对目标j的状态估计为与估计误差协方差矩阵i∈u1,j∈u2,k∈[1,n],总步数为n。
11、将两雷达的航迹数据转换到公共坐标系下,以雷达1的坐标系作为公共坐标系,使用以下公式将雷达2的坐标转换到公共坐标系上:
12、
13、式中,[x y]为雷达2在局部坐标系的值,θ为雷达2局部坐标系与雷达1公共坐标系之间的夹角,a、b分别为公共坐标系原点指向局部坐标系原点向量的横坐标与纵坐标。
14、进一步,所述步骤二中,基于步骤一的目标航迹数据构建目标的拓扑序列,使用ospa距离衡量各目标拓扑序列之间的相似度,具体过程为:定义雷达1的目标i的位置信息为定义拓扑数目nt,对雷达1,以目标i为参考点,寻找参考点相邻最近的nt个其他目标,其他目标与参考点的差向量构成雷达1的目标i的拓扑序列:
15、且属于的nt个近邻元素}
16、同理可得雷达2的拓扑序列。使用ospa距离衡量雷达1目标i的拓扑序列与雷达2目标j的拓扑序列间的距离。
17、
18、式中,p为ospa距离的阶参数,c为虚警、漏报的惩罚距离;和为拓扑序列和的元素数量;为与间的欧氏距离;h为与之间的分配矩阵,维度为qh为h中的配对数目,h矩阵中的元素hkl满足:
19、且
20、进一步,所述步骤三中,基于步骤二中各目标拓扑序列之间的ospa距离,以及各目标航速间的欧氏距离、各目标航向变化率间的欧氏距离构建模糊因素集,具体过程为:定义模糊因素1为各目标的拓扑序列之间的ospa距离:
21、
22、模糊因素2为各目标速度的欧氏距离:
23、
24、模糊因素3为各目标航向变化率间的欧式距离:
25、
26、进一步,所述步骤四中,计算步骤三中构建的模糊因素集的隶属度,对步骤二中各目标拓扑序列之间的ospa距离进行归一化,采用柯西型分布隶属度函数计算,具体包括:对于模糊因素1各目标拓扑序列间的ospa距离,选取柯西隶属度函数,判断两航迹相似的隶属度为:
27、
28、式中,为归一化后的ospa距离;τ1、γ为尺度参数,通过仿真确定。使用以下公式对模糊因素1进行归一化:
29、
30、对于模糊因素2、模糊因素3,选取正态隶属度函数,判断两航迹相似的隶属度为:
31、
32、使用以下公式对模糊因素1各目标拓扑序列间的ospa距离进行归一化:
33、
34、式中,u1为各目标拓扑序列之间的ospa距离,u1min为各目标拓扑序列之间的ospa距离中的最小值,u1max为各目标拓扑序列之间的ospa距离中的最大值。
35、进一步,所述步骤五中,对步骤四中模糊因素集的隶属度使用加权平均法计算综合相似度,构成模糊关联矩阵;根据关联矩阵进行关联判决,具体包括:根据模糊因素集的重要程度定义权向量al,l=1,2,3,采用加权平均法对第k时刻雷达1的第i条航迹与雷达2的第j条航迹进行综合评价,通过下式计算航迹相似度:
36、
37、由此构成模糊关联矩阵:
38、
39、采用最大综合相似度和阈值判别原则,基于关联矩阵进行综合判决。在模糊关联矩阵中寻找最大元素fij,若fij>ε,则判断航迹i与航迹j相关联,然后将fij对应的行、列元素全部置0,得到新的关联矩阵重复上述过程,直到新产生的模糊关联矩阵所有元素小于ε为止。
40、一种基于拓扑的多目标模糊航迹抗差关联方法的系统,其特征在于,包括:
41、数据预处理模块,在步骤一中,对两部雷达组成的多目标跟踪系统对公共区域内的目标跟踪航迹数据进行时间配准,并转换到公共坐标系下;
42、模糊因素构建模块,在步骤二、步骤三中,基于目标航迹数据构建目标的拓扑序列,使用ospa距离衡量各目标拓扑序列之间的相似度;基于中各目标拓扑序列之间的ospa距离,以及各目标航速间的欧氏距离、各目标航向变化率间的欧氏距离构建模糊因素集。
43、航迹关联判决模块,在步骤四、步骤五中,计算构建的模糊因素集的隶属度,对各目标拓扑序列之间的ospa距离进行归一化,采用柯西型分布隶属度函数计算;对模糊因素集的隶属度使用加权平均法计算综合相似度,构成模糊关联矩阵;根据关联矩阵进行航迹关联判决。
44、相对于现有技术,本发明具有如下有益效果:
45、1、本发明通过使用ospa距离衡量各目标拓扑序列之间的相似性,传统拓扑序列航迹关联方法中拓扑序列以正北方向按照方位角增量进行排序,在量测随机误差与系统误差存在的情况下,序列会有所变化,衡量序列间相似性将受很大影响,而ospa距离计算中会对各目标拓扑序列间相近的元素进行配对,可有效避免上述情况。
46、2、本发明通过各目标拓扑序列之间的ospa距离,以及各目标航速间的欧氏距离、各目标航向变化率间的欧氏距离三个不受系统误差影响的因素构建模糊因素集,具备抗系统误差能力,在测距系统误差与测角系统误差较大时相较于传统的航迹关联算法与拓扑序列航迹关联算法具有较好的航迹关联性能。
47、3、本发明通过在模糊隶属度计算中对各目标拓扑序列之间的ospa距离进行归一化,具有更广泛的航迹关联场景适应性,并使用柯西分布隶属度函数计算隶属度,相较于正态分布隶属度函数对于目标漏报、虚警情况下具有更高的容忍度。
48、综上,本发明基于各目标的拓扑序列之间的ospa距离、航速欧式距离、航向变化率的欧氏距离三个不受系统误差影响的因素构建模糊因素集,具备抗系统误差能力。使用ospa距离衡量拓扑序列间的相似性,且在模糊隶属度计算中对其进行归一化,使用柯西隶属度表征相似性,柯西隶属度函数衰减速度更慢,对于漏报、虚警情况下具有较高容忍度。结合了更多不受系统误差影响的因素,提高了航迹关联的准确性。
- 还没有人留言评论。精彩留言会获得点赞!