一种基于模数混合波束成形的盲信号波达方向定位方法
本发明属于波达方向定位,特别是指一种基于模数混合波束成形的盲信号波达方向定位技术。
背景技术:
1、波达方向估计能够实时、准确地确定信号源的方向,无需预先了解信号调制方式和收发节点的位置信息。该技术在实时通信、雷达、声纳和无线传感器网络等领域均具有重要应用。波达方向技术能够提高通信性能、目标追踪和定位准确度,增强通信安全性,推动无线通信技术进步,应对复杂环境挑战。盲信号估计方法不需要关于信号结构的先验信息,可灵活应对非线性和非高斯信号,且通常具有自适应性,在动态场景中更具优势。
2、现有的盲信号波达方向估计阵列处理方法有空间谱估计法和子空间分解法,前者通过计算空间谱或空间相关矩阵的特征值和特征向量来估计信号的波达方向,后者将接收信号的空间域分解为信号子空间和噪声子空间,然后利用信号子空间中的特征向量来估计波达方向。然而,在大规模混合波束成形架构下,天线数量较多导致信号空间维数增加,这会增加计算复杂度和搜索空间的大小,导致硬件资源和功耗开销均显著增加,限制了传统盲信号处理算法的工程可行性。同时,盲信号波达方向估计通常还需要满足实时性要求,其处理过程中大量数据的实时获取和有用信息的提取也是对已有方法的挑战之一。
3、针对现有盲信号波达方向估计所存在的问题,本发明利用先后切换各子阵波束分散指向和最大功率信号指向并进行空域解模糊角度估计,实现了基于相位测量的高精度盲信号波达方向定位,具有响应快、硬件复杂度低、精度高等优点。
技术实现思路
1、本发明的目的在于提供一种基于模数混合波束成形的盲信号波达方向定位方法,以解决盲信号波达方向估计存在的计算复杂度、硬件资源消耗和实时性问题。
2、本发明采用以下技术方案:
3、一种基于模数混合波束成形的盲信号波达方向定位方法,该方法适用于如下阵列:一个4×4的二维均匀面阵,被划分为四个2×2排列的子阵。每个子阵也由2×2个天线阵元构成,各子阵内采用移相器和衰减器对各阵元相位和模值进行配置,四个子阵各对应一个独立的模拟波束,每个模拟波束输出均有一个通道进行数字采集,以进一步计算数字域波束权值。本方法由基于波束分散子阵指向的盲信号粗估计、统一子阵指向的幅度补偿、统一子阵指向的相位解模糊三个主要内容构成,并对应有以下三个步骤:
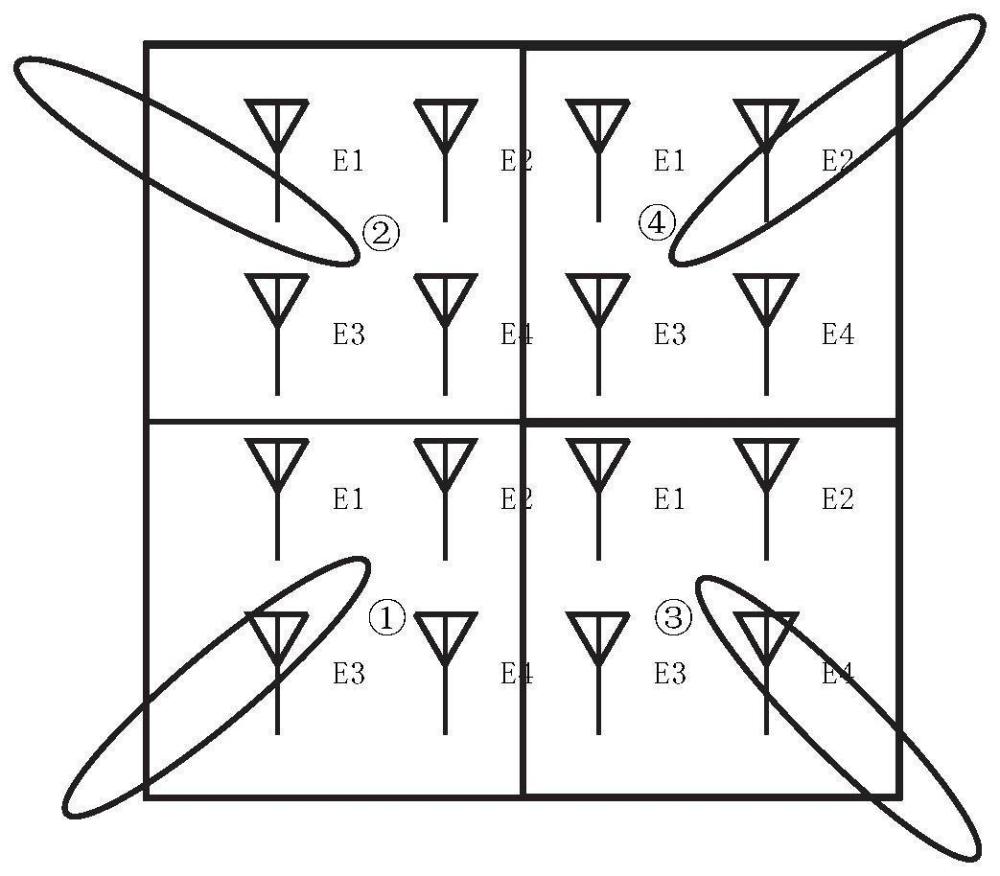
4、步骤一:切换各子阵波束分散指向(如附图1所示)。首先切换各子阵波束,使得四个子阵的波束分别指向四个正交的方向(俯仰、方位角分别为±30°),由于2×2阵列的3db波束宽度约为85°,这四个子阵分散指向的方向恰好覆盖了目标空域扫描区域,可以达到仅切换一次便扫描整个空域范围的目的;其次,以功率最大作为依据,每个子阵进行波束分散指向的功率检测,从而确定接收中功率最大的信号的大致来波方向。
5、步骤二:切换各子阵波束指向最大信号大致方向。依据步骤一中已估计得到的信号的大致来波方向,切换各子阵波束,并使各子阵统一指向该方向。,对各子阵输出的四路数字波束域信号进行互相关计算用以估计子阵间的相位关系,可实现±30°范围内的无模糊角度估计。
6、步骤三:空域解模糊高精度角度估计。联合步骤一得到的大致来波方向和步骤二子阵间的相位信息,通过最小参数距离搜索,可实现基于相位信息的空域解模糊高精度角度估计。从而实现了对功率最大信号的盲处理,包括粗略的目标检测和精确的方向估计。
7、其中,步骤一中各子阵分散波束指向在空间上相互正交且覆盖所需要的空域扫描区域。
8、步骤一中子阵波束指向如图1所示,俯仰、方位角分别为±30°,各个子阵对应信号的导向矢量间只有子阵间的相位差异,为了消除这个相位差异,选择以面阵中心为导向矢量计算坐标系的几何原点,以原点的周围四个点作为一个子阵计算参考导向矢量。可以得到接收的四路数字信号与参考导向矢量的关系,取接收信号的一路作为参考与数字波束域信号做自相关运算并取模,则消除了这个相位差异,从而得到波达方向的大致方向对应的导向矢量。
9、步骤二中通过一次2×2子阵的波束切换,将分散波束重新指向步骤一中确定的大致波达方向,并对各通道信号进行幅度补偿。
10、最后,步骤三中对步骤一和步骤二中得到的相位信息进行最小参数距离搜索,通过构建基于步骤二的新的角度矢量并与步骤一粗估角度进行求差运算实现了空域解模糊,从而实现高精度空域角度估计。
11、与现有技术相比,本发明有以下技术效果:
12、该方法利用将4×4的二维均匀阵列划分成4个2×2子阵实现分散波束指向,可以在一次波束切换过程中实现所需要的空间搜索域全覆盖,为步骤二中的盲信号波达方向大致方位估计提供基础。
13、该方法利用模拟域与数字域的分级波束成形,将4×4二维平面阵列的全阵元16个射频通道减少为4个子阵的4个射频通道输出,大大减少了对信号做收发调理和基带调理所需的射频硬件和软件计算资源。由于在实际应用中射频通道往往冗余于信源数目,因此该设计是合理有效的,尤其在体积敏感的应用中提高了有效载荷占比。
14、该方法在切换子阵波束分散指向与最大信号指向的两个步骤中,分别采用10μs同步信号即可计算实现,证明该方法可以快速地实现对全空域无模糊的角度估计,可以满足系统对快速通信的要求。
15、该方法利用多通道信号相位信息求解信号波达方向,省去了其它doa技术中的矩阵求逆运算,大大降低了硬件运算复杂度,有利于后续硬件实现。
16、该方法仅进行两次波束切换就实现了盲信号的精确波达方向估计,有效节省资源及时间。
17、该方法利用构建新的角度向量与步骤二中粗估方向进行比较,实现了目标空域范围内基于相位信息的无模糊盲信号波达方向估计。
技术特征:
1.一种基于模数混合波束成形的盲信号波达方向定位方法,应用于毫米波高速移动平台,其特征在于:一个平面均匀阵列被划分为四个面阵子阵,每个子阵连接一个射频通道,首先切换各子阵波束分散指向空间搜索域,以功率最大为依据得到盲信号大致来向,然后切换全阵元波束指向这一大致来向,得到四路数字波束域信号,考虑波束空间和子阵间的信息组合,可实现基于相位信息的空域解模糊高精度角度估计,包括下述步骤:
2.根据权利要求1所述的一种基于模数混合波束成形的盲信号波达方向定位方法,其应用的毫米波高速移动通信平台由一个毫米波阵列为4×4的二维均匀面阵构成,并被划分为四个2×2排列的子阵。
3.根据权利要求1所述的一种基于模数混合波束成形的盲信号波达方向定位方法,其应用的平台中每个子阵内采用移相器和衰减器对各阵元相位和模值进行配置,四个子阵各对应一个独立的模拟波束,每个模拟波束输出均有一个通道进行数字采集,以进一步计算数字域波束权值。
4.根据权利要求1所述的一种基于模数混合波束成形的盲信号波达方向定位方法,其特征在于,步骤一中各子阵分散波束指向的俯仰及方位角分别为±30°,在空间上相互正交且覆盖目标空域扫描区域。
5.根据权利要求1所述的一种基于模数混合波束成形的盲信号波达方向定位方法,其特征在于,步骤一中各个子阵对应信号的导向矢量间只有子阵间的相位差异,为了消除这个相位差异,选择以面阵中心为导向矢量计算坐标系的几何原点,以原点的周围四个点作为一个子阵计算参考导向矢量as,可以得到接收的四路数字信号与参考导向矢量as的关系,取接收信号的一路作为参考与数字波束域信号做自相关运算并取模,则消除了这个相位差异,从而得到波达方向的大致方向对应的导向矢量
6.根据权利要求1所述的一种基于模数混合波束成形的盲信号波达方向定位方法,其特征在于,步骤一得到的各行代表子阵内各阵元的权值,将第一和第三个权值作为一组与第二和第四个权值进行互相关运算,取其相位则为俯仰角差值δθ1,将第一和第二个权值作为一组与第三和第四个子阵的权值进行互相关运算,取其相位则为方位角差值信号波达方向的方位角和俯仰角粗略估计值可由下式解得:
7.根据权利要求1所述的一种基于模数混合波束成形的盲信号波达方向定位方法,其特征在于,步骤二中得到的xdig中各行代表各子阵接收的信号,将第一和第三个输出信号作为一组与第二和第四个输出信号进行互相关运算,取其相位则为子阵俯仰角差值δθ2,将第一和第二个输出信号作为一组与第三和第四个输出信号进行互相关运算,取其相位则为子阵方位角信号波达方向的方位角与俯仰角相位估计值可由下式解得:
8.根据权利要求1所述的一种基于模数混合波束成形的盲信号波达方向定位方法,其特征在于,步骤三中构建了基于步骤二的新的角度矢量
9.根据权利要求1所述的一种基于模数混合波束成形的盲信号波达方向定位方法,其特征在于,步骤三中计算和θvec向量与与θcoar的差值,并求最小值对应的如下式所示:
技术总结
本发明公开了一种基于模数混合波束成形的盲信号波达方向定位方法,由一个毫米波阵列为4×4的二维均匀面阵构成,并被划分为四个2×2排列的子阵。每个子阵也由2×2个天线阵元构成。切换各子阵波束使得四个子阵的波束分别指向四个正交的方向并覆盖目标空域扫描区域,然后对每个子阵进行波束分散指向的功率检测,以确定接收中功率最大的信号的大致来波方向。切换各子阵波束指向最大信号大致方向。继续切换各子阵波束,使四个子阵均指向大致来波方向,对输出的四路数字波束域信号进行分组互相关计算得到子阵间相位关系,可实现±30°范围内的无模糊角度估计。本发明实现了针对盲信号的波达方向定位,具有响应快、硬件复杂度低、精度高等优点。
技术研发人员:鬲雨晨,洪玺,常凝,王文慧,王文杰
受保护的技术使用者:西安交通大学
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!