一种基于多信息源的通航欺骗检测方法及系统与流程
本发明涉及通航抗欺骗,特别涉及一种基于多信息源的通航欺骗检测方法及系统。
背景技术:
1、通用航空是指除军事、警务、海关缉私飞行和公共航空运输飞行以外的航空活动,主要可分为载客类、载人类、其他类三类业务。由于卫星信号功率微弱,这使得卫星信号极易受到干扰和和欺骗。卫星导航欺骗指的是通过播发虚假卫星信号,诱导接收机捕获欺骗信号,从而得到错误的位置或时间信息。
2、为了构建良好的通航欺骗检测方法,人们也提出了诸如相关峰畸变欺骗监测技术,基于伪距观测量一致性raim的抗欺骗技术,基于多传感器敏感导航信息一致性的组合导航抗欺骗技术等方法,但是这些现有的方法大多采用imu和gnss信号组合检测欺骗信号,imu长时间运行容易产生漂移,难以判别是imu故障信号还是gnss欺骗信号,此外欺骗信号与真实信号差异性较小,直接计算难以发现且计算复杂度高。
技术实现思路
1、本发明提供了一种基于多信息源的通航欺骗检测方法及系统,以解决目前gnss欺骗检测方法信息源单一,计算复杂度高,抗干扰能力不强,微小欺骗信号难以判断的技术问题。
2、为解决上述技术问题,本发明提供了如下技术方案:
3、本发明提供了一种基于多信息源的通航欺骗检测方法,包括:
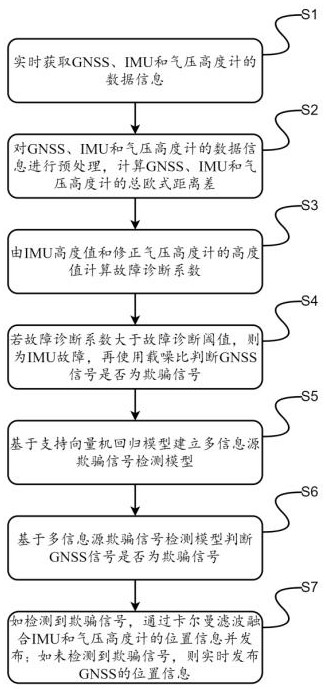
4、s1:实时获取gnss、imu和气压高度计的数据信息;
5、s2:对gnss、imu和气压高度计的数据信息进行预处理,计算gnss、imu和气压高度计的总欧式距离差;
6、s3:由imu高度值和修正气压高度计的高度值计算故障诊断系数;
7、s4:若故障诊断系数大于故障诊断阈值,则为imu故障,再使用载噪比判断gnss信号是否为欺骗信号;
8、s5:基于支持向量机回归模型建立多信息源欺骗信号检测模型;
9、s6:基于多信息源欺骗信号检测模型判断gnss信号是否为欺骗信号;
10、s7:如检测到欺骗信号,通过卡尔曼滤波融合imu和气压高度计的位置信息并发布;如未检测到欺骗信号,则实时发布gnss的位置信息。
11、进一步地,所述实时获取gnss、imu和气压高度计的数据信息,包括:
12、所述gnss的数据信息包括位置信息和载噪比,其中=,分别表示接收机的x轴、y轴和z轴的位置信息;
13、所述imu的数据信息包括接收机的3个坐标轴的角速度和加速度,t表示历元时刻;
14、所述气压高度计的数据信息包括高度值。
15、进一步地,所述对gnss、imu和气压高度计的数据信息进行预处理,计算gnss、imu和气压高度计的总欧式距离差,包括:
16、接收机利用载噪比来检测接收到的信号质量,设定噪声为白噪声且进行归一化处理,则载噪比表达式如下:
17、
18、其中,表示载波的功率,表示噪音的功率,b表示信号功率与噪声功率密度之比;
19、通过积分加速度和积分角速度信息计算得到imu高度值;
20、修正气压高度计的高度值,具体为:
21、
22、其中,以实际海平面为基准平面得到的高度值,以标准海平面为基准平面修正后得到的高度值;
23、计算gnss、imu和气压高度计的总欧式距离差:
24、
25、其中,为气压高度计在t历元时刻的高度值,为imu在t历元时刻的z轴位置信息,为gnss在t历元时刻的z轴位置信息。
26、进一步地,所述由imu高度值和修正气压高度计的高度值计算故障诊断系数,包括:
27、
28、其中,是t历元时刻的故障诊断系数。
29、进一步地,所述若故障诊断系数大于故障诊断阈值,则为imu故障,再使用载噪比判断gnss信号是否为欺骗信号,包括:
30、初始化故障诊断阈值为,当小于时表示imu正常工作,大于时表示imu发生故障,则使用载噪比判断是否为欺骗信号;
31、对载噪比阈值最小值和载噪比阈值最大值进行初始化,比较当前历元时刻接收机获取的gnss载噪比信号与载噪比阈值的大小,判断gnss信号是否为欺骗信号;若gnss载噪比信号在载噪比阈值最小值和最大值范围内,即为真实信号,否则为欺骗信号;
32、根据载噪比历史数据自适应更新载噪比阈值最小值和载噪比阈值最大值。
33、计算历史数据载噪比的均方差:
34、
35、其中,是载噪比历史数据的平均值,是载噪比历史数据的数量,u表示平均值,n表示载噪比历史数据;
36、自适应更新t+1历元时刻载噪比阈值最小值:
37、
38、其中,表示t+1历元时刻载噪比阈值最小值;
39、自适应更新t+1历元时刻载噪比阈值最大值:
40、
41、其中,表示t+1历元时刻载噪比阈值最大值。
42、进一步地,所述基于支持向量机回归模型建立多信息源欺骗信号检测模型,包括:
43、输入总欧式距离差和载噪比,基于支持向量机回归模型构建多信息源欺骗信号检测模型以及目标函数,采用改进麻雀算法确定支持向量机模型中的惩罚系数c,检测欺骗信号;
44、进一步地,所述多信息源欺骗信号检测模型的目标函数为:
45、
46、其中,是权重系数,是松弛变量,是惩罚系数,i是序列号,q表示样本总数。
47、进一步地,所述改进麻雀算法确定支持向量机模型中的惩罚系数c具体计算公式如下:
48、
49、其中,表示第v个混沌序列数,表示第v+1个混沌序列数,mod表示为取余函数,为圆周率。
50、进一步地,所述基于多信息源欺骗信号检测模型判断gnss信号是否为欺骗信号;
51、进一步地,所述如检测到欺骗信号,卡尔曼滤波融合imu和气压高度计的位置信息,此处以imu的z轴位置信息作为状态量,以气压高度计的高度值作为观测量,更新的z轴位置信息与imu的x轴和y轴位置信息一起实时发布,之后更新的z轴位置信息纠正imu的漂移;如未检测到欺骗,实时发布gnss的位置信息。
52、另一方面,本发明还提供了一种基于多信息源的通航欺骗检测系统,包括:
53、信号采集及预处理模块,实时获取gnss、imu和气压高度计的数据信息;对gnss、imu和气压高度计的数据信息进行预处理,计算gnss、imu和气压高度计的总欧式距离差;
54、故障诊断系数计算模块,由imu高度值和修正气压高度计的高度值计算故障诊断系数;若故障诊断系数大于故障诊断阈值,则为imu故障,再使用载噪比判断gnss信号是否为欺骗信号;
55、多信息源欺骗信号检测模型模块,基于支持向量机回归模型建立多信息源欺骗信号检测模型;基于多信息源欺骗信号检测模型判断gnss信号是否为欺骗信号;
56、位置信息发布模块,如检测到欺骗信号,通过卡尔曼滤波融合imu和气压高度计的位置信息并发布;如未检测到欺骗信号,则实时发布gnss的位置信息。
57、本发明提供的技术方案带来的有益效果至少包括:
58、1、本发明欺骗信号检测分两个方面,由imu高度值和修正气压高度计的高度值计算故障诊断系数判断imu是否发生故障,若发生故障则采用载噪比判断gnss是否为欺骗信号;否则采用多信息源欺骗信号检测模型判断gnss是否为欺骗信,该方法可以避免因imu故障导致的误检测,提高抗干扰能力。
59、2、设置故障诊断阈值和载噪比阈值,基于历史数据自适应更新载噪比阈值,提高欺骗信号检测敏感度。
60、3、输入总欧式距离差和载噪比,使用基于支持向量机回归模型建立多信息源欺骗信号检测模型,使用循环映射改进的麻雀算法计算惩罚系数,解决麻雀算法陷入局部极值的问题,降低检测计算复杂度,进一步提高欺骗信号检测的精准性和计算效率。
61、4、卡尔曼滤波融合imu和气压高度计,一方面实时输出位置信息,提高面对欺骗信号的处置能力,另一方面融合结果及时纠正imu的漂移,实现多信息源欺骗信号检测模型输入样本数据和imu自身的动态纠正。
- 还没有人留言评论。精彩留言会获得点赞!